Wireless Remote Weather Station with micro:bit
 bboyho
bboyho {kind=link}
Coding Challenges
Read/Write Different Files on the OpenLog
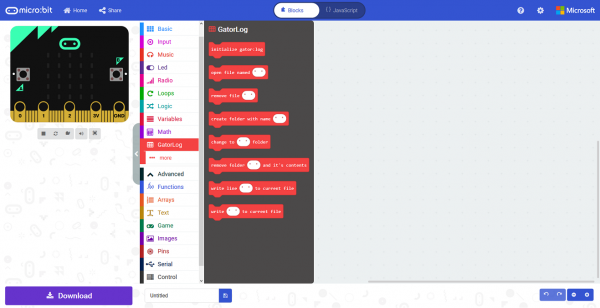
The examples created a file every time the OpenLog is powered up and we simply wrote data to one file. Can you try to write data to a specific file using the gator:log extension? Note that the OpenLog has the same functionality as the gator:log but they have a different board layout.
Average, High/Low, Totals for the Day?
How hot was it today? What time was it when the day was at its coldest? Try making additional variables to keep track of the average, high, low, and/or totals for each day. Then try to cycle through the readings in a serial terminal or serial enabled LCD when pressing a button.
Transmitting Other Sensor Readings
Try adding another sensor to the weather station's Qwiic connector. Want to monitor the UV light coming from the sun? Try adding the gator:UV to monitor UV exposure in a certain location. Or try adding a microphone to monitor noise levels in your neighborhood.


Serial LCD Display
Try soldering some headers on the serial enabled LCD display and send serial data from the receiving micro:bit via serial UART or I2C port. This can display a lot more readings in a small amount of time compared to the LED array without the need for a computer. Can you toggle between each reading using buttons?

SparkFun 16x2 SerLCD - Black on RGB 3.3V
LCD-14072
SparkFun 16x2 SerLCD - RGB on Black 3.3V
LCD-14073
SparkFun 20x4 SerLCD - Black on RGB 3.3V
LCD-14074Broadcasting
Have more than two micro:bits? Try modifying code to broadcast a signal from one micro:bit to several micro:bits by having the receiving micro:bits on the same channel!

LEDs
If you have the gator:bit or some WS2812-based LEDs, try having the LEDs react based on the temperature that the weather station is sensing. Or try alerting yourself with a color when the soil moisture and temperature are not ideal for your plants.


"Earth" Rover
Try adding the weather station on a robot to survey the weather at different locations. You'll need a robot that is able to handle the terrain but for flat surfaces, the micro:bot will work. Try using one micro:bit for the weather station, one for the micro:bot, and one for the remote controller. Can you switch between modes to survey the environment and control the micro:bot?