RedBot Assembly Guide Rev 02
This Tutorial is Retired!
This tutorial covers concepts or technologies that are no longer current. It's still here for you to read and enjoy, but may not be as useful as our newest tutorials.
 HelloTechie,
HelloTechie,  SFUptownMaker
SFUptownMaker Introduction
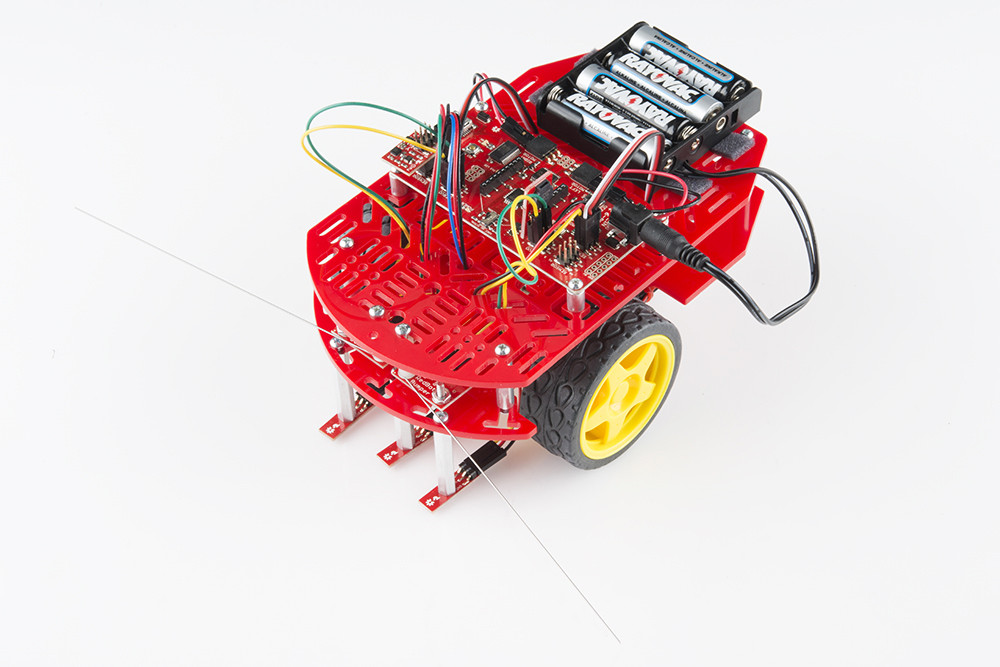
The RedBot is robotic development platform capable of teaching basic robotics and sensor integration! Based on the SparkFun RedBoard and programmable in the Arduino environment, the RedBot has all the I/O you need to make a small robot in no time at all.
Materials Included
When you purchase the RedBot Kit, you should have the following materials:

- 1x RedBot Mainboard
- 1x Magician Chassis
- 1x Accelerometer RedBot Sensor
- 3x Line Follower RedBot Sensor
- 10x F/F 6" Jumper Wire
- 4x 4-40 1-¼" Flat Head Screw
- 3x 4-40 1-½" Aluminum Hex Standoff
- 4x 4-40 3/8" Metal Standoff
- 7x 4-40 1" Metal Standoff
- 3x 4-40 ¼" Phillips Screw (10 Pack)
- 4x 4-40 Hex Nut
- 4x Sticky Tab
Along with everything listed above, you will also need 4x AA batteries to power your RedBot.
Materials Not Included
This tutorial will cover how to install all the parts you received with your RedBot Kit, PLUS it will go over how to install a few extra parts NOT included with the kit. These parts include the Wheel Encoder Kit, RedBot Buzzer, and two RedBot Mechanical Bumpers.


Again, you do not need these parts to assemble your RedBot, but they will be present throughout this guide. Please ignore any instances of the extra sensors if you do not need to assemble them. Sections pertaining strictly to these extra parts will be marked with **asterisks**.
If you are installing one or all of these extras, you may also want to get a few more jumper wires.
Recommended Tools
A needle nose pliers, Flush Cutters and a screwdriver are also useful when putting together the RedBot.



{kind=link}
If you are following this tutorial and using the Wheel Encoder Kit, you will want 2x 4" zip-ties to connect the wheel encoder to the motors included in the RedBot kit.
Suggested Reading
To better understand the RedBot and all of its parts, we recommend checking out the Getting Started with the RedBot tutorial.