RedBot Assembly Guide Rev 02
This Tutorial is Retired!
This tutorial covers concepts or technologies that are no longer current. It's still here for you to read and enjoy, but may not be as useful as our newest tutorials.
 HelloTechie,
HelloTechie,  SFUptownMaker
SFUptownMaker {kind=link}
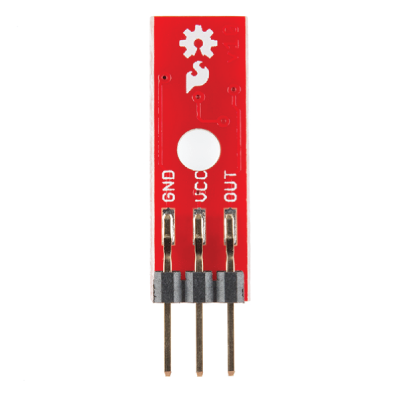
RedBot Sensor - Line Followers
In this section, you will be putting standoffs on the RedBot Sensor - Line Followers. Then you will add the sensors to your chassis.
Locate the Following:
| 6x 4-40 x 1/4" Phillips Screw | 3x 4-40 x 1 1/2" Metal Hex Standoff |
 |
 |
| 3x RedBot Sensor - Line Follower | 9x Jumper Wire |
 |
 |
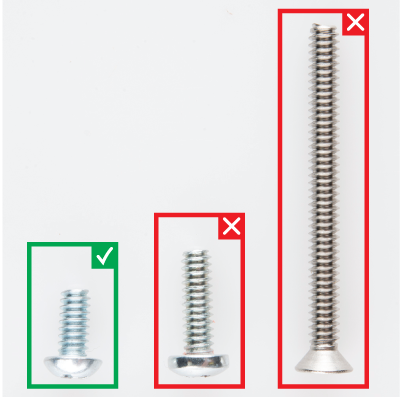
Please note: ** Pay close attention to which screws you are using. There are two different screws in the RedBot Kit. (30x** of the 4-40 x 1/4" Phillips screws and 4x of the 4-40 x 1 1/4" flat head screws).
Adding the RedBot Sensor - Mechanical Bumper? You will have 3x of the 4-40 x ⅜" Phillips screws.
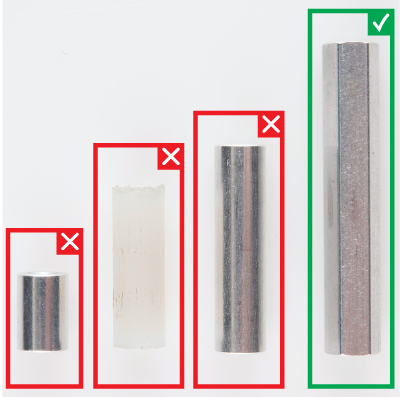
There are also different standoffs in the RedBot Kit and add-ons. The RedBot Kit comes with 7x 4-40 x 1" metal standoffs, 4x 4-40 x ⅜" metal standoff,s and 3x 4-40 x 1 1/2" metal hex standoff.s
Adding the RedBot Sensor - Mechanical Bumper? You will have 3x of the 4-40 x 3/4" nylon standoffs.
Adding the RedBot Line Followers
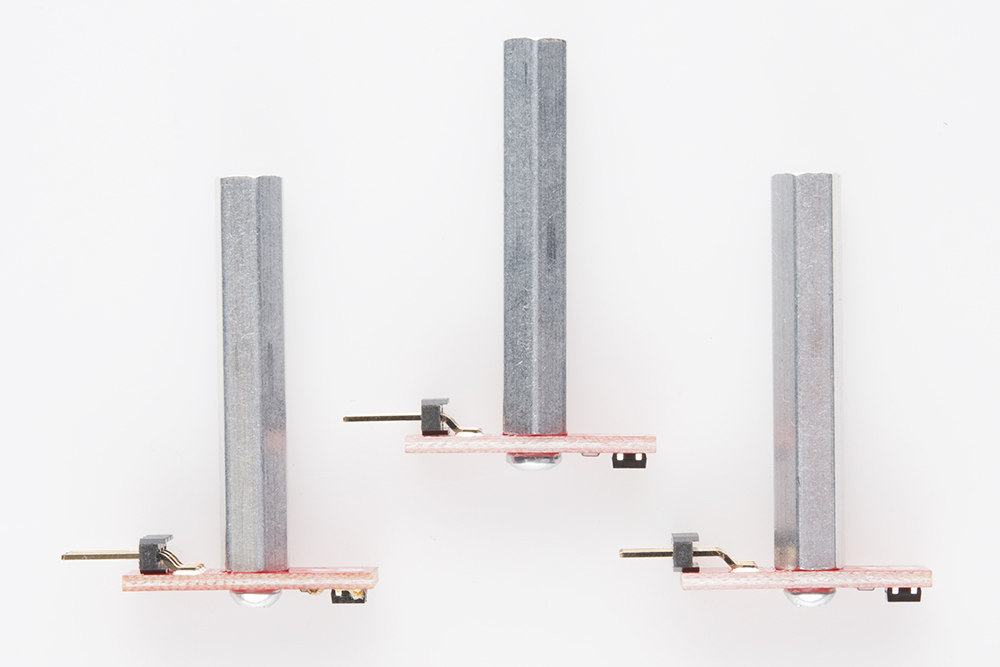
Place a 4-40 x 1/4" Phillips screw through one of the line followers. Then, twist on the 4-40 x 1 1/2" metal hex standoff. Make sure to tighten the standoff on the line follower's header side. The top of the screw should be on the same side as the line follower's sensor.
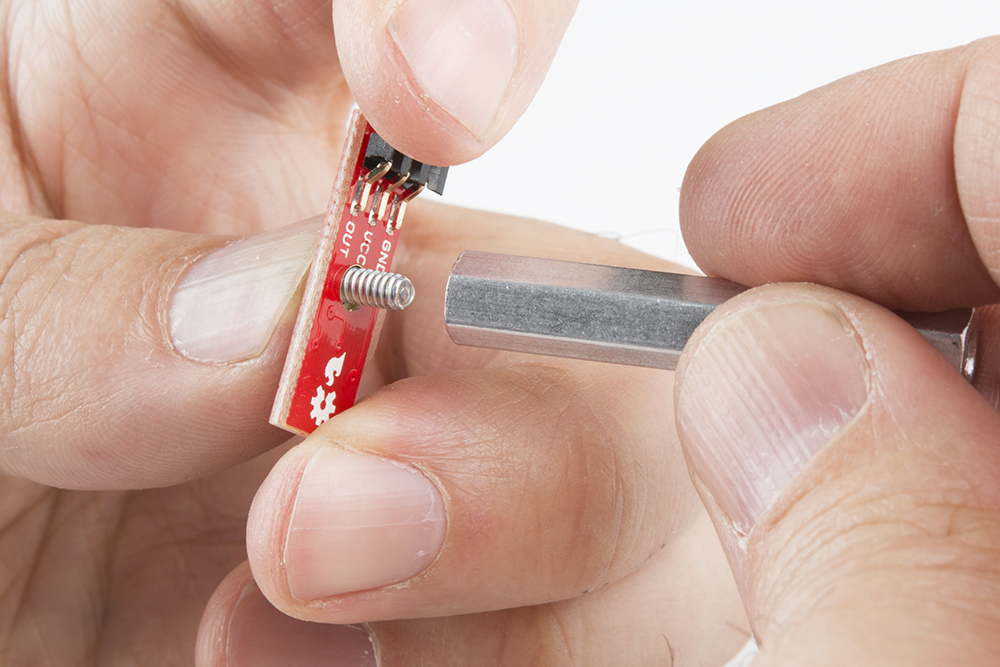
Do this for the other two line followers.
Locate three spots on the chassis where you will be adding the line followers.
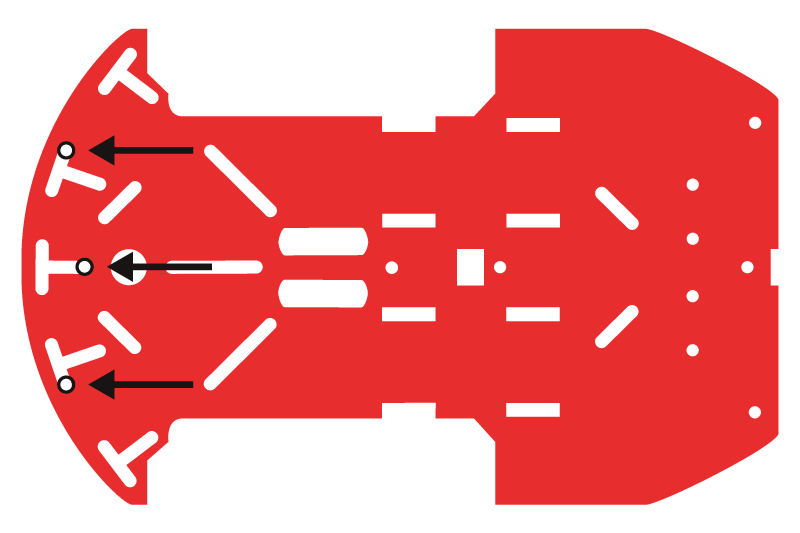
Place a 4-40 1/4" Phillips screw through the top side of the chassis piece. Tighten down the 4-40 x 1 1/2" metal hex standoff with a line follower into the bottom chassis piece. The line follower should be on the bottom side of the chassis piece. The headers on the line follower should be pointing in toward the chassis. Do this for the other two line followers.

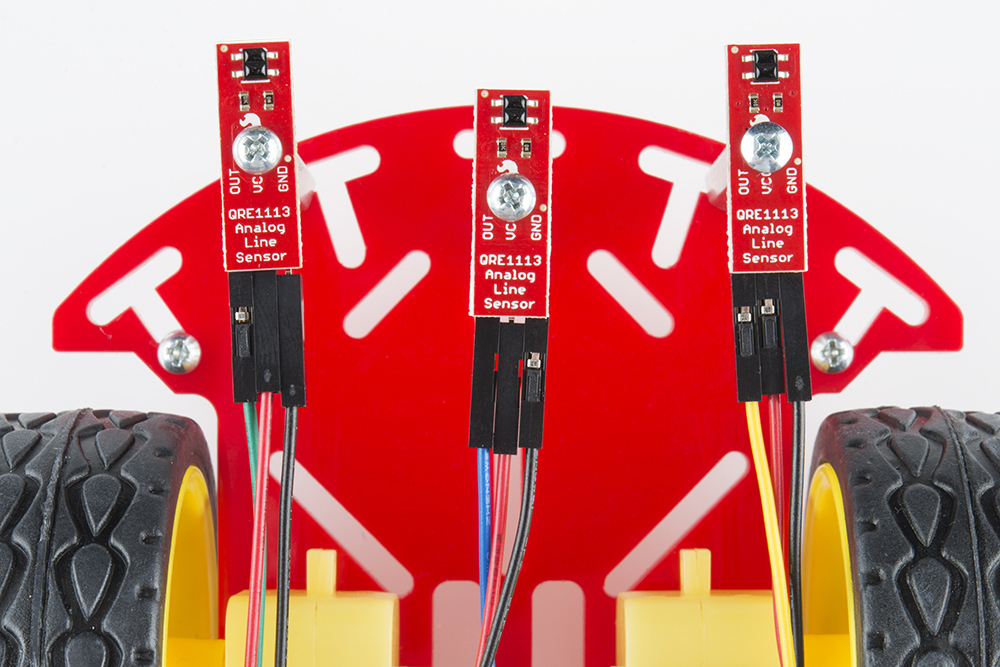
Adding Jumper Wires
Time to add some jumper wires! You will need to connect a jumper wire to each female header pin on the line followers. There will be nine total jumper wires.
You do not need to have the same color jumper wires as this assembly guide. However, following along with the jumper wire colors in this assembly guide may be helpful if this is your first time assembling the RedBot. See below if you are following along with the jumper wire colors to help lessen confusion when hooking up the RedBot Mainboard later in the guide.
Left RedBot Sensor - Line Follower:
| Jumper Wires | Left RedBot Sensor - Line Follower |
|---|---|
| Jumper Wire - Yellow | OUT |
| Jumper Wire - Red | VCC |
| Jumper Wire - Black | GND |
Please note: When you have the RedBot upright and the front of the chassis facing north, the left line follower will be on the left side.
Middle RedBot Sensor - Line Follower:
| Jumper Wires | Middle RedBot Sensor - Line Follower |
|---|---|
| Jumper Wire - Blue | OUT |
| Jumper Wire - Red | VCC |
| Jumper Wire - Black | GND |
Right RedBot Sensor - Line Follower:
| Jumper Wires | Right RedBot Sensor - Line Follower |
|---|---|
| Jumper Wire - Green | OUT |
| Jumper Wire - Red | VCC |
| Jumper Wire - Black | GND |
Please note: When you have the RedBot upright and the front of the chassis facing north, the right line follower will be on the right side.
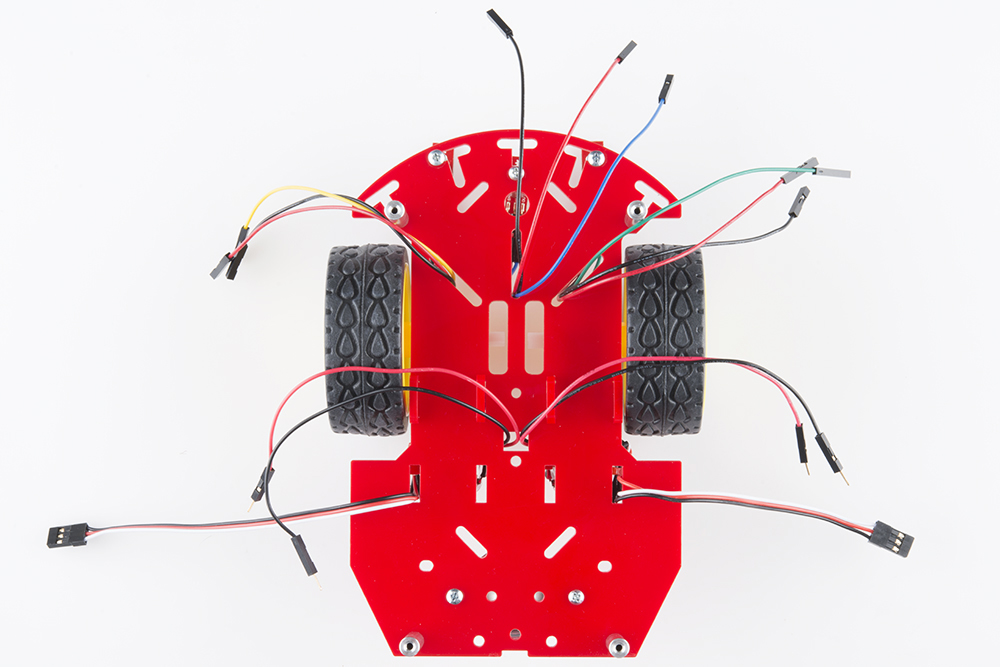
Here is the view from the bottom side:
Take the jumper wires and place them through the chassis openings. The jumper wires should be sticking out on the top side of the chassis. We recommend that each group of three jumper wires, for each line follower, goes in a different chassis opening as shown below. This helps keep track of the different jumper wires when connecting to the RedBot Mainboard later.