Qwiic VR IMU (BNO080) Hookup Guide
 Englandsaurus
Englandsaurus Introduction
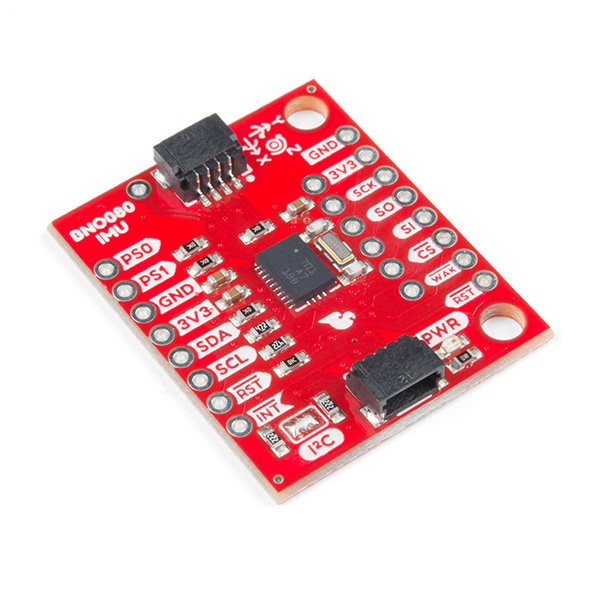
Bosch's BNO080 is a combination triple axis accelerometer/gyro/magnetometer packaged with an ARM Cortex M0+ running powerful algorithms. The BNO080 Inertial Measurement Unit (IMU) produces accurate rotation vector headings, excellently suited for VR and other heading applications with a static rotation error of 2 degrees or less. It’s what we’ve been waiting for: all the sensor data is combined and drift corrected into meaningful, accurate IMU information. It's perfect for any project that needs to sense orientation or motion. We've taken this IMU and stuck it on a Qwiic enabled breakout board, in order to make interfacing with the tiny, QFN package a bit easier to connect.
In this hookup guide, we'll connect our sensor up to our microcontroller of choice and separately read the rotation vectors (which is what we will mainly want), acceleration vectors, gyro values, and magnetometer vectors. We'll check out how to implement the step counter on the BNO080 in order to use it as a pedometer. We'll also read Q values and various other metadata from the sensor. Knowing what activity you're performing is important so we'll learn how to classify what activity the IMU is performing (i.e. Sitting still, moving, biking, walking, running, etc...) and how confident the IMU is that each activity is being performed. The examples will also show how to calibrate our hardware to give us the most accurate readings possible. Printing out raw packets will also be examined for debugging purposes. Finally, we'll examine how to configure the sensor on different I2C ports and addresses. A bonus example is provided in Processing to show us how to use quaternion data to orient a cube.
Required Materials
To get started, you'll need a microcontroller to, well, control everything.


Particle Photon (Headers)
WRL-13774
Raspberry Pi 3
DEV-13825Now to get into the Qwiic ecosystem, the key will be one of the following Qwiic shields to match your preference of microcontroller:


{kind=link}
SparkFun Qwiic Shield for Photon
DEV-14477You will also need a Qwiic cable to connect the shield to your accelerometer, choose a length that suits your needs.

Qwiic Cable - 50mm
PRT-14426
Qwiic Cable - 100mm
PRT-14427
Qwiic Cable - 200mm
PRT-14428
Qwiic Cable - 500mm
PRT-14429Suggested Reading
If you aren't familiar with the Qwiic system, we recommend reading here for an overview.
| Qwiic Connect System |
We would also recommend taking a look at the following tutorials if you aren't familiar with them. We also delve into Processing in this tutorial, if you aren't familiar, check out the below tutorial on Processing.