Contributors:
 Englandsaurus
Englandsaurus Introduction
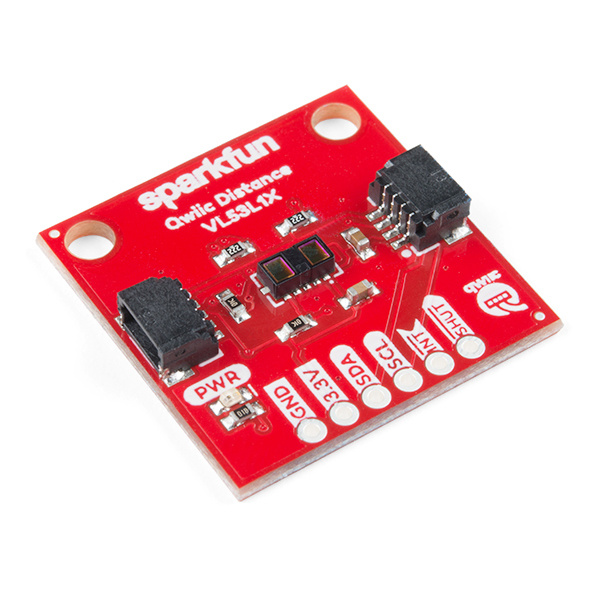
The VL53L1X is the latest Time Of Flight (ToF) sensor to be released. It uses a VCSEL (vertical cavity surface emitting laser) to emit a class 1 IR laser (940 nm) and time the reflection to the target. (You can’t see the laser but cell phones can) What does all this mean? You can measure the distance to an object up to 4 meters away with millimeter resolution! That’s pretty incredible.
SEN-14722
This SparkFun Distance Sensor Breakout utilizes the VL53L1X next generation ToF sensor module to give you the highly accurate…
We’ve found the precision of the sensor to be 1mm but the accuracy is around +/-5mm. The minimum read distance of this sensor is 4cm. In this hookup guide we'll go over how to read distance, change ranging modes, and check the status of our range measurement along with the sample rate. We'll also check out how to display distance and speed over an LCD display.
Required Materials
The Qwiic Distance Sensor does need a few additional items for you to get started. The RedBoard Qwiic is for the Arduino examples and the Qwiic pHAT is for the Raspberry Pi example (see note below). You may already have a few of these items, so feel free to modify your cart based on your needs. Additionally, there are also alternative parts options that are available as well (click button below to toggle options).
KIT-15081
To make it even easier to get started, we've assembled this Qwiic Cable Kit with a variety of Qwiic cables from 50mm to 500mm…
DEV-15123
The SparkFun RedBoard Qwiic is an Arduino-compatible development board with a built in Qwiic connector, eliminating the need …
DEV-15351
The SparkFun Qwiic pHAT for Raspberry Pi is the quickest and easiest way to make your way into the Qwiic ecosystem and still …
Retired
Qwiic compatible microcontrollers:
DEV-15123
The SparkFun RedBoard Qwiic is an Arduino-compatible development board with a built in Qwiic connector, eliminating the need …
DEV-14713
With a 32-bit ARM Cortex-M4F MCU, the SparkFun SAMD51 Thing Plus is one of our most powerful microcontroller boards yet!
DEV-14812
If you’re ready to step up your Arduino game from older 8-bit/16MHz microcontrollers, the SparkFun RedBoard Turbo is a form…
WRL-14689
The SparkFun ESP32 Thing Plus is the next step to get started with Espressif IoT ideations while still enjoying all the ameni…
Retired
In addition we also offer, Qwiic compatible stackable shields for microcontrollers and pHATs for single board computers (like the
Raspberry Pi boards) that don't include a Qwiic connector.
DEV-14495
The SparkFun Qwiic Adapter provides the perfect means to make any old I2C board into a Qwiic enabled board.
DEV-14352
The SparkFun Qwiic Shield is an easy-to-assemble board that provides a simple way to incorporate the Qwiic Connect System wit…
DEV-14477
The SparkFun Qwiic Shield for Photon is an easy-to-assemble board that provides a simple way to incorporate the Qwiic System …
Retired
DEV-14459
The SparkFun Qwiic HAT for Raspberry Pi is the quickest and easiest way to make your way into the Qwiic ecosystem and still u…
DEV-15794
The SparkFun Qwiic SHIM for Raspberry Pi is a small, easily removable breakout that easily adds a Qwiic connector to your Ras…
DEV-15316
The SparkFun Servo pHAT for Raspberry Pi allows your Raspberry Pi to control up to 16 servo motors in a straightforward manne…
DEV-15351
The SparkFun Qwiic pHAT for Raspberry Pi is the quickest and easiest way to make your way into the Qwiic ecosystem and still …
Retired
You will also need a Qwiic cable to connect to your Qwiic Distance Sensor, choose a length that suits your needs.
PRT-14426
This is a 50mm long 4-conductor cable with 1mm JST termination. It’s designed to connect Qwiic enabled components together …
Retired
PRT-14427
This is a 100mm long 4-conductor cable with 1mm JST termination. It’s designed to connect Qwiic enabled components together…
Retired
PRT-14428
This is a 200mm long 4-conductor cable with 1mm JST termination. It’s designed to connect Qwiic enabled components together…
Retired
PRT-14429
This is a 500mm long 4-conductor cable with 1mm JST termination. It’s designed to connect Qwiic enabled components together…
Retired
Alternative Parts (Toggle)
Raspberry Pi Example: If you don't already have them, you will need a
Raspberry Pi and
standard peripherals. An example setup is listed below. (
The Qwiic Distance Sensor and Python library have not been tested on the newly released Raspberry Pi 4 because we don't carry it in out catalog yet.)
Suggested Reading
If you're unfamiliar with jumper pads, I2C, Qwiic, or Python be sure to checkout some of these foundational tutorials.
Serial Communication
Asynchronous serial communication concepts: packets, signal levels, baud rates, UARTs and more!
Logic Levels
Learn the difference between 3.3V and 5V devices and logic levels.
I2C
An introduction to I2C, one of the main embedded communications protocols in use today.
Serial Terminal Basics
This tutorial will show you how to communicate with your serial devices using a variety of terminal emulator applications.
Raspberry Pi SPI and I2C Tutorial
Learn how to use serial I2C and SPI buses on your Raspberry Pi using the wiringPi I/O library for C/C++ and spidev/smbus for Python.
Qwiic pHAT for Raspberry Pi Hookup Guide
Get started interfacing your Qwiic enabled boards with your Raspberry Pi. The Qwiic pHAT connects the I2C bus (GND, 3.3V, SDA, and SCL) on your Raspberry Pi to an array of Qwiic connectors.
RedBoard Qwiic Hookup Guide
This tutorial covers the basic functionality of the RedBoard Qwiic. This tutorial also covers how to get started blinking an LED and using the Qwiic system.
The Qwiic Distance Sensor is intended for the Qwiic connect system. We recommend familiarizing yourself with the Logic Levels and I2C tutorials before using it. Click on the banner above to learn more about our Qwiic products.











{kind=link}



