Digital Sandbox Experiment Guide
 jimblom,
jimblom,  bri_huang
bri_huang {kind=link}
15: Serial Motoring (Addon)
Motors make the world go round. Well, not literally, but they make a lot things we use every day spin and actuate. There are tiny vibration motors in cell phones, speedy motors that spin CDs and Blu-Ray discs, and of course, massive engine motors that help propel our cars. In this experiment we'll explore one of the most fundamental motor types out there - DC motors - and we'll tell the Sandbox precisely how fast we want the motor to spin.
Note: This experiment requires the Digital Sandbox Add-On Kit, purchased separately.
Background Information
A DC motor turns electrical energy into a rotational, mechanical energy. DC motors are popular because they're very simple to control: Give them some voltage and they spin. You can control the speed of a motor much as you might control the intensity of an LED - with PWM - so in this experiment, we'll be using the analog output block to control the motor's speed.
This experiment also introduces serial input. Up to this point our conversations with the Sandbox have been very one-sided - the Sandbox has been outputting data to the serial monitor. Serial input allows us to send data to the Sandbox via the serial monitor.
Active Parts

Code Components
Here is the diagram for this program. The Set Analog Pin blocks are used to control the motor, and a speed variable is used to keep track of the motor speed. A few new blocks, related to serial communication, are introduced.
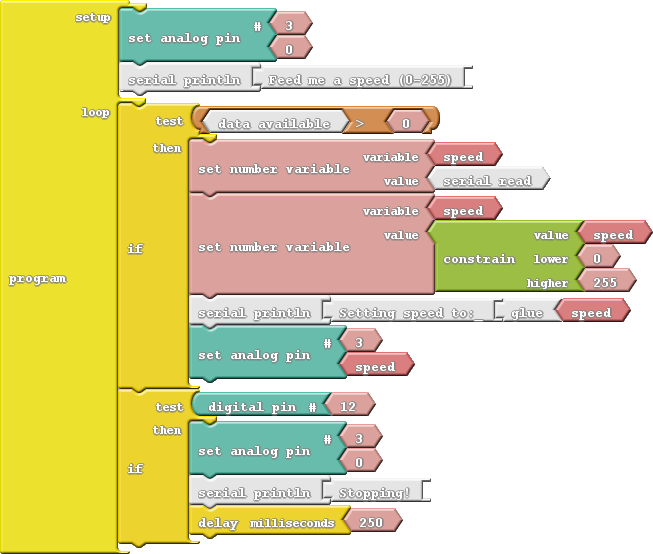
- Serial Read: We'll use this block to put serial data into the Sandbox. The Serial Read block is like a number variable, but instead of using a Set Number Variable block to set it, we use the Serial Monitor. This block will store the integer most recently sent to the Sandbox from the Serial Monitor.
- Data Available: This block keeps track of whether or not any serial data is available. If no serial data has been sent to the Sandbox, this block stores a zero. If data is sent to the Sandbox this block will return a one. The value of this block will go back to zero once the serial data has been read (using the Serial Read block).
Do This
Construct the program as shown in the picture, then upload the code.
After uploading, connect the motor’s black wire (GND) to the GND pin on the Sandbox’s add-on header. Then, connect the motor’s red wire to the OUT pin on the Sandbox’s add-on header. Your motor should now be connected to the Sandbox as shown in this picture:

Now open the Serial Monitor, type a number between zero and 255 into the box next to "Send," and then click that button. The Sandbox should respond with a message, and the motor should start spinning.
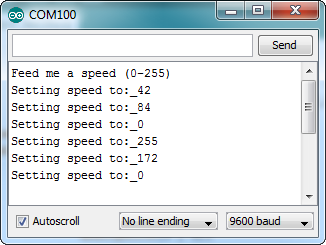
What happens when you send 255? How about zero? What happens when you send a number greater than 255 or less than zero (a negative)? Can you spot a block in the code that is restricting those values?
As a "safety mechanism," if you ever need to stop the motor from spinning, press the button to bring it to a halt.
Further Explorations
- Try connecting something mechanical to the motor. Perhaps tape a narrow piece of paper to create a spinner and play Twister. Or add a few pieces of paper to create a fan. What else can you connect to the axle to take advantage of the rotational motion?
- As a programming challenge, can you make the motor smoothly speed up or down when a new serial value is received?