Serial Controlled Motor Driver Hookup Guide
Contributors:
 MTaylor
MTaylor
MTaylor {kind=link}
Resources and Going Further
Advanced Features
The advanced features such as configuring the fail safe, data rates, diagnostic features, and bridging can be found in the following document. Use a PDF viewer that supports bookmarks for easiest navigation.
Not covered in this guide:
- VCC breakable to allow up to 5.5v levels.
- PSoC programming port.
- Bus diagnostic reporting
- Configurable failsafe time and operation
- Configurable expansion bus bitrate to 50, 100, or 400 kHz.
- Configurable expansion bus update rate from 1ms to 255ms, or by command only.
Additional Examples
There are also some additional examples packaged with the library which are not described here. Have a look at them and the arduino library source files to better understand the advanced usage.
Arduino examples not covered in this guide:
- RegisterRWTool -- Use to convert ascii communication from a Arduino window into direct register access.
- Run-timeDiagnostics -- Demonstrates reading the diagnostic registers and using the built-in diagnostic structure for data storage.
Robot examples available by github repo XbeeTeensyXCVR:
- HamburgerBot -- Two wheeled robot using digital inputs that emulate analog drive behavior.
- DualDriveBot -- Double wheeled robot using analog sticks to provide smooth single stick driving.
Heads up! Originally, these examples were written to configure an XBee Series 1 to communicate in transparency mode. However, this can apply to the XBee Series 3 module as long as you configure the firmware to the legacy 802.15.4 protocol. For more information, check out the Exploring XBees and XCTU tutorial.
 |
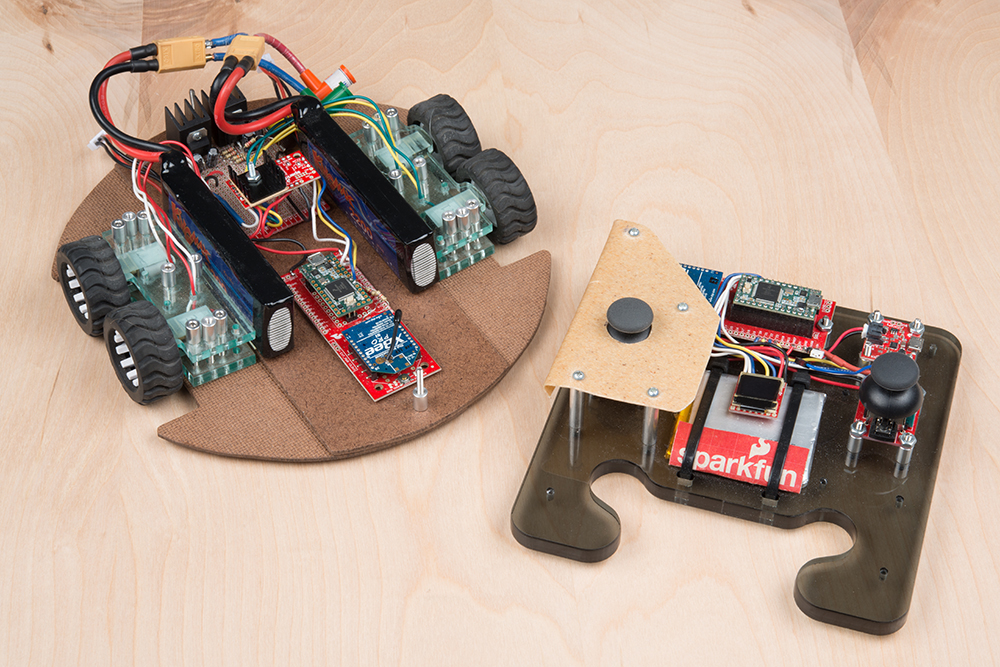 |
These robots are built using the serial controlled motor driver, with an XBee link.
Check out more robot action in the SCMD demo video:
For more motor-driving action, check out these other great SparkFun tutorials:
Servo Trigger Programming Guide
Looking under the hood of the Servo Trigger -- using the development environment and some finer details of the firmware.
ESP32 Thing Power Control Shield Hookup Guide
This tutorial shows you how to get started with the ESP32 Thing Power Control Shield.
Light-Seeking Robot
We use parts from the SparkFun Inventor's Kit v4.0 to create a light-seeking robot that mimics the behavior of single-celled organisms.
SparkFun Auto pHAT Hookup Guide
The pHAT to get your projects moving. This guide will help you get started using the Auto pHAT.