Photon IMU Shield Hookup Guide
 b_e_n
b_e_n {kind=link}
Introduction
Does your Photon project need an accelerometer? What about a gyroscope or a magnetometer? With the SparkFun Photon IMU Shield, you can get all three, thanks to the LSM9DS1 IC module.
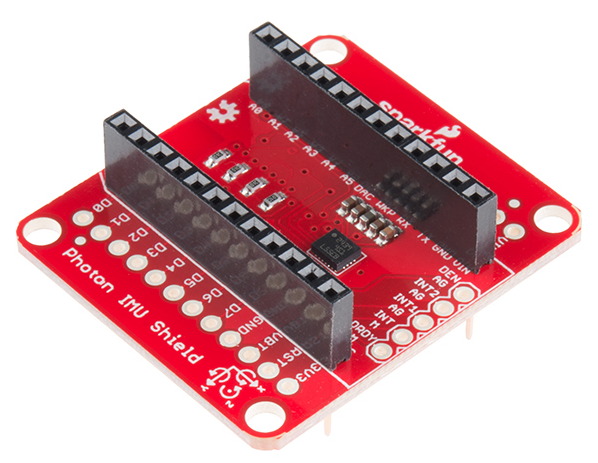
The SparkFun Photon IMU (Inertial Measurement Unit) Shield is a versatile motion-sensing add-on board for your Photon device that houses a 3-axis accelerometer, 3-axis gyroscope, and 3-axis magnetometer. That’s right, 9 degrees of freedom (9DOF) from a single IC!
Each sensor in the LSM9DS1 supports a large variety of ranges: the accelerometer’s scale can be set to ± 2, 4, 6, 8, or 16 g, the gyroscope supports ± 245, 500, and 2000 °/s, and the magnetometer has full-scale ranges of ± 2, 4, 8, or 12 gauss. As a bonus, the SparkFun Photon IMU Shield comes with the headers already soldered on, so you can plug your Photon (or Core) in and get started!
Covered in this tutorial
This tutorial will cover the functionality of the IMU shield, how to hook it up in your project, and how to program with it using the SparkFun LSM9DS1 Library from the online Particle build environment.
Required Materials
To get started with the Photon IMU Shield you'll want a Photon, a micro-USB cable, and of course the shield itself. You'll also want to sign up for an account on particle.io and register your Photon. Instructions on how to do this can be found at docs.particle.io.
SparkFun Photon IMU Shield
DEV-13629
Particle Photon (Headers)
WRL-13774Suggested Reading
Here's a few things you may want to brush up on or dive into if you plan on making the most of your IMU Shield.
- Accelerometer Basics -- It's always a good idea to know what you're measuring, what's possible, and what is not.
- Gyroscopes! -- Learn what makes a gyro tick...er, rotate.
- Magnetometers -- Magnetometers...how do they work!?
- I2C -- I2C is the preferred method used to control the IMU. It uses less wires, but is quite a bit slower than, for instance, SPI.
- Serial Peripheral Interface (SPI) -- SPI is another method of communication with the IMU. Refer to the section on jumpers if you'd like to use this board in SPI mode.