Photon IMU Shield Hookup Guide
 b_e_n
b_e_n {kind=link}
Using the LSM9DS1 Library
Now that we understand the IMU hardware, let's put some code on this thing and see what it can do. Using the Particle library we've written, you'll be able to capture acceleration, angular rotation, and magnetic field strength with ease!
Getting the Particle LSM9DS1 Library
For this page we'll be using the online Particle environment. If you're using the Particle Dev environment instead, you can get the library and code examples from the GitHub repository.
Load the Demo Example
If you haven't created a Particle user account and claimed your board, you'll need to do that now. Starting here is a great idea if you're having trouble.
Once you're logged into build.particle.io and have a device selected (all this is covered at the link above), you'll want to click on the create new app button in the sidebar -- it's big and blue, you can't miss it. Call your app something like 'IMU_test'.
Next -- this is the important part -- we include the LSM9DS1 library. To do this:
- Click on the icon that looks like a bookmark (it's all the way to the left on the black skinny sidebar, 4th up from the bottom)
- In the text box under 'community libraries', search for 'SparkFunLSM' and you'll see 'SparkFunLSM9DS1' come up (though it might be cut off a little bit, don't worry).
It should look something like this:
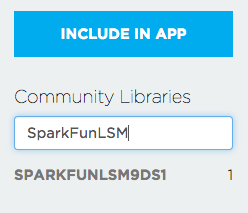
- Click on the library name, and a bunch of stuff will pop up, including all the library files as well as a few options of what to do with the library.
- In this case, we just want to use the library in our app, so click on the 'include in app' button.
- This will lead you to list of all your apps - click on the name of the app you just created, and you should see a statement like
#include "SparkFunLSM9DS1/SparkFunLSM9DS1.h"at the top of your app.
Now that we've included the library in our app, let's give it some code - just copy the demo code below and paste it into your app, below the include statements. NOTE: this example uses I2C - check out the "LSM9DS1_BASIC_SPI.CPP" file in the Particle library for and SPI example.
language:cpp
/*****************************************************************
LSM9DS1_Basic_I2C.ino
SFE_LSM9DS1 Library Simple Example Code - I2C Interface
Jim Lindblom @ SparkFun Electronics
Original Creation Date: April 30, 2015
https://github.com/sparkfun/SparkFun_LSM9DS1_Particle_Library
The LSM9DS1 is a versatile 9DOF sensor. It has a built-in
accelerometer, gyroscope, and magnetometer. Very cool! Plus it
functions over either SPI or I2C.
This Photon sketch is a demo of the simple side of the
SFE_LSM9DS1 library. It'll demo the following:
* How to create a LSM9DS1 object, using a constructor (global
variables section).
* How to use the begin() function of the LSM9DS1 class.
* How to read the gyroscope, accelerometer, and magnetometer
using the readGryo(), readAccel(), readMag() functions and
the gx, gy, gz, ax, ay, az, mx, my, and mz variables.
* How to calculate actual acceleration, rotation speed,
magnetic field strength using the calcAccel(), calcGyro()
and calcMag() functions.
* How to use the data from the LSM9DS1 to calculate
orientation and heading.
Hardware setup: This library supports communicating with the
LSM9DS1 over either I2C or SPI. This example demonstrates how
to use I2C.
If you have the Photon IMU shield, no extra wiring is required.
If you're using a breakout, the pin-out is as follows:
LSM9DS1 --------- Photon
SCL -------------- D1 (SCL)
SDA -------------- D0 (SDA)
VDD ------------- 3.3V
GND ------------- GND
(CSG, CSXM, SDOG, and SDOXM should all be pulled high.
Jumpers on the breakout board will do this for you.)
Development environment specifics:
IDE: Particle Build
Hardware Platform: Particle Photon
SparkFun Photon IMU Shield
This code is released under the MIT license.
Distributed as-is; no warranty is given.
*****************************************************************/
#include "SparkFunLSM9DS1/SparkFunLSM9DS1.h"
#include "math.h"
//////////////////////////
// LSM9DS1 Library Init //
//////////////////////////
// Use the LSM9DS1 class to create an object. [imu] can be
// named anything, we'll refer to that throught the sketch.
LSM9DS1 imu;
///////////////////////
// Example I2C Setup //
///////////////////////
// SDO_XM and SDO_G are both pulled high, so our addresses are:
#define LSM9DS1_M 0x1E // Would be 0x1C if SDO_M is LOW
#define LSM9DS1_AG 0x6B // Would be 0x6A if SDO_AG is LOW
////////////////////////////
// Sketch Output Settings //
////////////////////////////
#define PRINT_CALCULATED
//#define PRINT_RAW
#define PRINT_SPEED 250 // 250 ms between prints
// Earth's magnetic field varies by location. Add or subtract
// a declination to get a more accurate heading. Calculate
// your's here:
// http://www.ngdc.noaa.gov/geomag-web/#declination
#define DECLINATION -8.58 // Declination (degrees) in Boulder, CO.
void setup()
{
Serial.begin(115200);
// Before initializing the IMU, there are a few settings
// we may need to adjust. Use the settings struct to set
// the device's communication mode and addresses:
imu.settings.device.commInterface = IMU_MODE_I2C;
imu.settings.device.mAddress = LSM9DS1_M;
imu.settings.device.agAddress = LSM9DS1_AG;
// The above lines will only take effect AFTER calling
// imu.begin(), which verifies communication with the IMU
// and turns it on.
if (!imu.begin())
{
Serial.println("Failed to communicate with LSM9DS1.");
Serial.println("Double-check wiring.");
Serial.println("Default settings in this sketch will " \
"work for an out of the box LSM9DS1 " \
"Breakout, but may need to be modified " \
"if the board jumpers are.");
while (1)
;
}
}
void loop()
{
printGyro(); // Print "G: gx, gy, gz"
printAccel(); // Print "A: ax, ay, az"
printMag(); // Print "M: mx, my, mz"
// Print the heading and orientation for fun!
// Call print attitude. The LSM9DS1's magnetometer x and y
// axes are opposite to the accelerometer, so my and mx are
// substituted for each other.
printAttitude(imu.ax, imu.ay, imu.az, -imu.my, -imu.mx, imu.mz);
Serial.println();
delay(PRINT_SPEED);
}
void printGyro()
{
// To read from the gyroscope, you must first call the
// readGyro() function. When this exits, it'll update the
// gx, gy, and gz variables with the most current data.
imu.readGyro();
// Now we can use the gx, gy, and gz variables as we please.
// Either print them as raw ADC values, or calculated in DPS.
Serial.print("G: ");
#ifdef PRINT_CALCULATED
// If you want to print calculated values, you can use the
// calcGyro helper function to convert a raw ADC value to
// DPS. Give the function the value that you want to convert.
Serial.print(imu.calcGyro(imu.gx), 2);
Serial.print(", ");
Serial.print(imu.calcGyro(imu.gy), 2);
Serial.print(", ");
Serial.print(imu.calcGyro(imu.gz), 2);
Serial.println(" deg/s");
#elif defined PRINT_RAW
Serial.print(imu.gx);
Serial.print(", ");
Serial.print(imu.gy);
Serial.print(", ");
Serial.println(imu.gz);
#endif
}
void printAccel()
{
// To read from the accelerometer, you must first call the
// readAccel() function. When this exits, it'll update the
// ax, ay, and az variables with the most current data.
imu.readAccel();
// Now we can use the ax, ay, and az variables as we please.
// Either print them as raw ADC values, or calculated in g's.
Serial.print("A: ");
#ifdef PRINT_CALCULATED
// If you want to print calculated values, you can use the
// calcAccel helper function to convert a raw ADC value to
// g's. Give the function the value that you want to convert.
Serial.print(imu.calcAccel(imu.ax), 2);
Serial.print(", ");
Serial.print(imu.calcAccel(imu.ay), 2);
Serial.print(", ");
Serial.print(imu.calcAccel(imu.az), 2);
Serial.println(" g");
#elif defined PRINT_RAW
Serial.print(imu.ax);
Serial.print(", ");
Serial.print(imu.ay);
Serial.print(", ");
Serial.println(imu.az);
#endif
}
void printMag()
{
// To read from the magnetometer, you must first call the
// readMag() function. When this exits, it'll update the
// mx, my, and mz variables with the most current data.
imu.readMag();
// Now we can use the mx, my, and mz variables as we please.
// Either print them as raw ADC values, or calculated in Gauss.
Serial.print("M: ");
#ifdef PRINT_CALCULATED
// If you want to print calculated values, you can use the
// calcMag helper function to convert a raw ADC value to
// Gauss. Give the function the value that you want to convert.
Serial.print(imu.calcMag(imu.mx), 2);
Serial.print(", ");
Serial.print(imu.calcMag(imu.my), 2);
Serial.print(", ");
Serial.print(imu.calcMag(imu.mz), 2);
Serial.println(" gauss");
#elif defined PRINT_RAW
Serial.print(imu.mx);
Serial.print(", ");
Serial.print(imu.my);
Serial.print(", ");
Serial.println(imu.mz);
#endif
}
// Calculate pitch, roll, and heading.
// Pitch/roll calculations take from this app note:
// http://cache.freescale.com/files/sensors/doc/app_note/AN3461.pdf?fpsp=1
// Heading calculations taken from this app note:
// http://www51.honeywell.com/aero/common/documents/myaerospacecatalog-documents/Defense_Brochures-documents/Magnetic__Literature_Application_notes-documents/AN203_Compass_Heading_Using_Magnetometers.pdf
void printAttitude(
float ax, float ay, float az, float mx, float my, float mz)
{
float roll = atan2(ay, az);
float pitch = atan2(-ax, sqrt(ay * ay + az * az));
float heading;
if (my == 0)
heading = (mx < 0) ? 180.0 : 0;
else
heading = atan2(mx, my);
heading -= DECLINATION * M_PI / 180;
if (heading > M_PI) heading -= (2 * M_PI);
else if (heading < -M_PI) heading += (2 * M_PI);
else if (heading < 0) heading += 2 * M_PI;
// Convert everything from radians to degrees:
heading *= 180.0 / M_PI;
pitch *= 180.0 / M_PI;
roll *= 180.0 / M_PI;
Serial.print("Pitch, Roll: ");
Serial.print(pitch, 2);
Serial.print(", ");
Serial.println(roll, 2);
Serial.print("Heading: "); Serial.println(heading, 2);
}
Now hit the 'flash' button (the one that looks like a lightning bolt) and wait for the magic to begin!