Getting Started with the Red Hat Co.Lab Robot
 D___Run___,
D___Run___,  Gina Likins
Gina Likins {kind=link}
Troubleshooting
| If your robot won’t move... | Make sure you have power!
You should see a red blinking light on the moto:bit where it says “STAT” (status). If not, then...
|
| The Moto:bit tools don’t show up in MakeCode... | Try installing them again from the add package option in MakeCode |
| You don’t see the Micro:Bit on your computer when you go to transfer your code |
|
| Your robot is spinning in a circle or running in reverse... | Follow the steps under Fixing Motor Issues section? |
| Your robot isn’t driving in a straight line… | Look at the lines in the code where you tell each motor what to do:
move _____ motor _____ at__ %
This command tells the robot which motor to move (RIGHT or LEFT), which direction to move it (FORWARD or REVERSE), and at which throttle / power percentage to spin it (0-100).
By adjusting the throttle / power percentage of the two motors relative to each other you can make one “stronger” than the other. So, for instance, if your robot lists to the left you can turn your right motor “down” to 90% power and leave your left motor at 100%. Play with the amounts to see how much correction your motors need. |
Changing Batteries
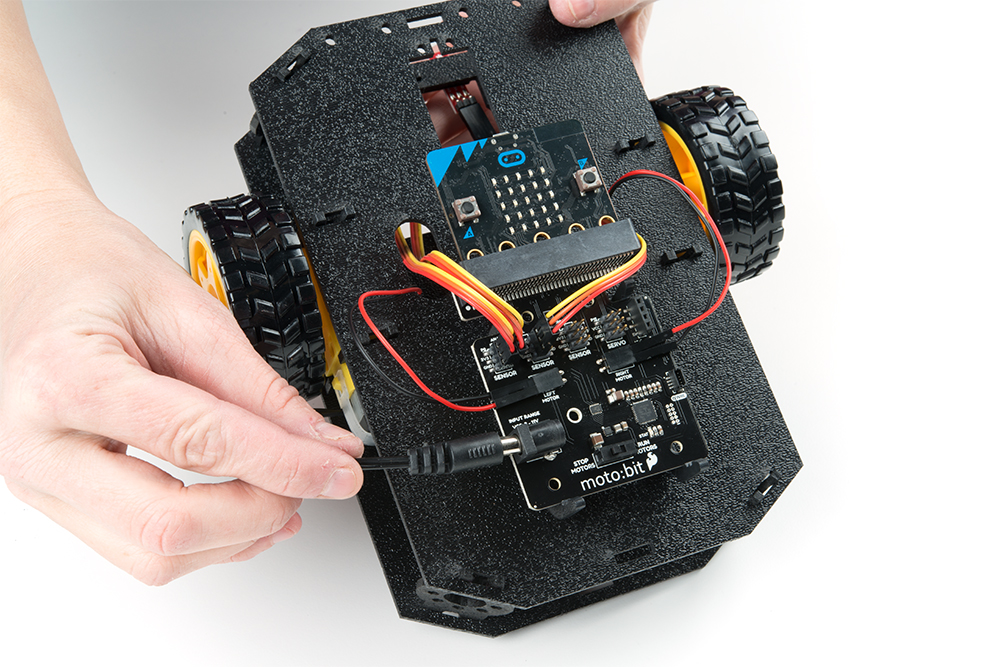
When you find that you need to replace the batteries in the micro:bot, first unplug the battery pack from the moto:bit.
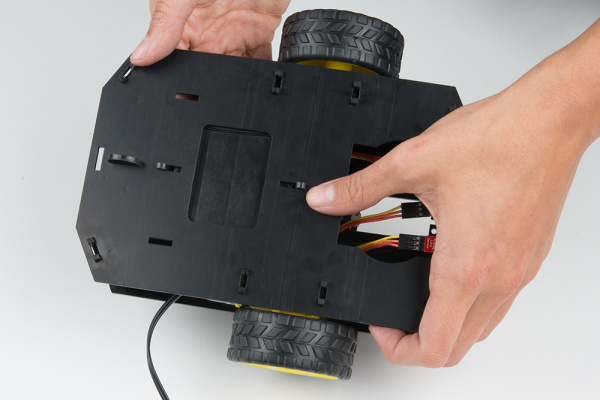
Turn the micro:bot over and push on the Battery Holder through the hole in the Bottom Chassis. This will cause the Battery Pack Clip to unsnap from the Bottom Chassis.
Slide the Battery Pack and Clip out from the back of the micro:bot.
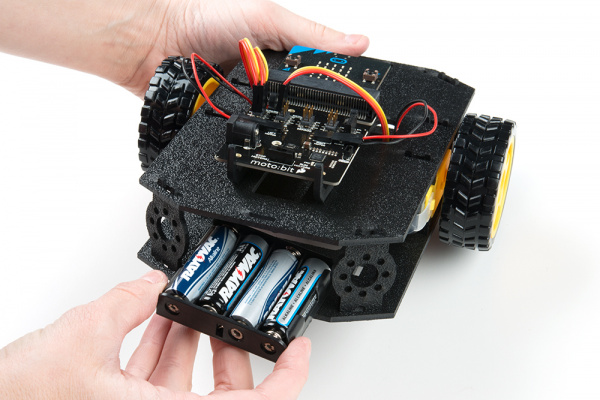
Change the batteries, then follow the steps in the “Attach Battery Pack” section above to put the Battery Pack back in the micro:bot.