SparkFun RTK Reference Station Hookup Guide
Contributors:
 PaulZC
PaulZC
PaulZC {kind=link}
Resources and Going Further
We hope you enjoy using the RTK Reference Station as much as we have!
Here are the pertinent technical documents for the RTK Reference Station:
- RTK Product Manual
- Hardware GitHub Repo (contains the open source hardware electronics and enclosure design)
- Schematic
- Case Dimensions
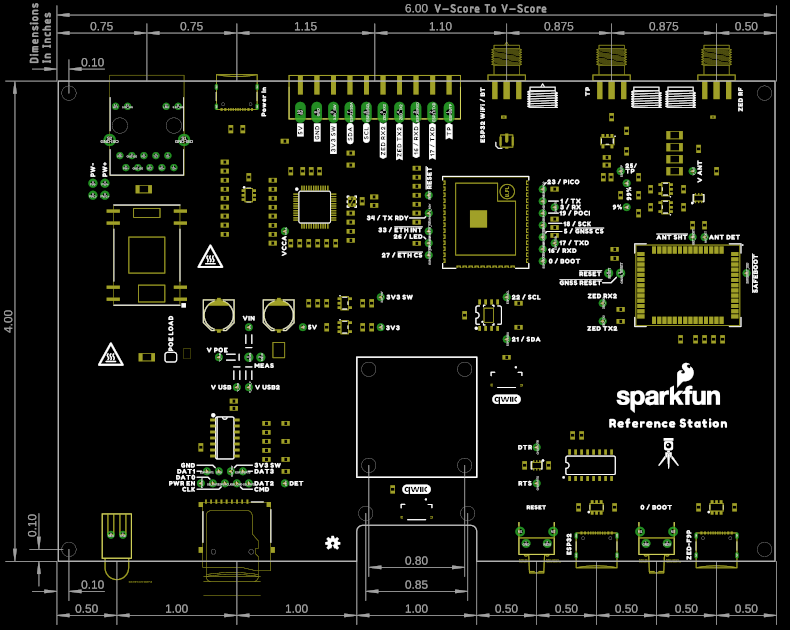
- PCB Dimensions
- ZED-F9P GNSS Receiver Datasheet
- MAX17048 Fuel Gauge IC
- ATECC608A Crypto Co-processor Datasheet Summary
- WIZnet W5500 Datasheet
- Ag9900M PoE Module Datasheet
- RJ45 Ethernet Mag Jack Datasheet
{kind=link}
Here are the links to the firmware, update tools and stand-alone code examples:
- RTK Firmware Binaries
- RTK Firmware Uploader
- RTK Firmware Source (contains the firmware that runs SparkFun RTK products)
- u-blox GNSS Firmware Update GUI (Windows only. Sorry!)
- Arduino Examples / Test Sketches
Check out these additional tutorials for your perusal:
Basic Autonomous Kit for Sphero RVR Assembly Guide
Get your Basic Autonomous Kit for Sphero RVR all hooked up with this guide!
OpenLog Artemis Hookup Guide
How to use and re-program the OpenLog Artemis, an open source datalogger. The OLA comes preprogrammed to automatically log data. The OLA can also record serial data, analog voltages, or readings from external Qwiic-enabled I2C devices. Some of these Qwiic-enabled devices include GPS/GNSS modules, pressure, altitude, humidity, temperature, air quality, environment, distance, and weight sensors.
SparkFun GPS-RTK Dead Reckoning ZED-F9K Hookup Guide
The u-blox ZED-F9K is a powerful GPS-RTK unit that uses a fusion of IMU, wheel ticks, a vehicle dynamics model, correction data, and GNSS measurements to provide highly accurate and continuous position for navigation in the difficult conditions. We will quickly get you set up using the Qwiic ecosystem through Arduino so that you can start reading the output!
GeoFence Treasure Hunt With Artemis Global Tracker
Follow along with an engineering student as he creates a distance-based game using the Artemis Global Tracker!
ESP32 Thing Plus Hookup Guide
Hookup guide for the ESP32 Thing Plus (Micro-B) using the ESP32 WROOM's WiFi/Bluetooth system-on-chip in Arduino.
How to Install CH340 Drivers
How to install CH340 drivers (if you need them) on Windows, Mac OS X, and Linux.
Setting up a Rover Base RTK System
Getting GNSS RTCM correction data from a base to a rover is easy with a serial telemetry radio! We'll show you how to get your high precision RTK GNSS system setup and running.
How to Build a DIY GNSS Reference Station
Learn how to affix a GNSS antenna, use PPP to get its ECEF coordinates and then broadcast your own RTCM data over the internet and cellular using NTRIP to increase rover reception to 10km!