SparkFun GPS Breakout (ZOE-M8Q and SAM-M8Q) Hookup Guide
 Elias The Sparkiest
Elias The Sparkiest {kind=link}
SparkFun ZOE-M8Q Hardware Overview
Power
Power for this board should be 3.3V. There is a 3.3V pin on the PTH header along the side of the board, but you can also provide power through the Qwiic connector.
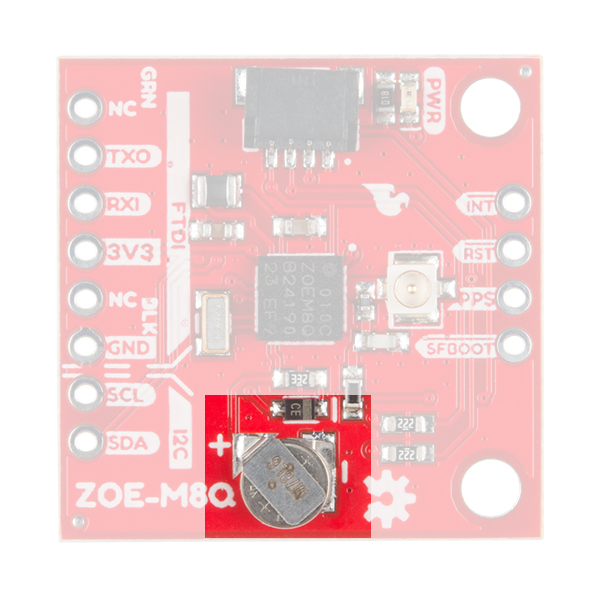
Battery
The small metal disk opposite of the Qwiic connector is a small lithium battery. This battery does not provide power to the IC like the 3.3V system does, but to relevant systems inside the IC that allow for a quick reconnection to satellites. The time to first fix will about ~29 seconds, but after the product has a lock, that battery will allow for a one second time to first fix. This is known as a hot start and lasts for four hours after the board is powered down. The battery provides over a years worth of power to the backup system and charges slowly when the board is powered.
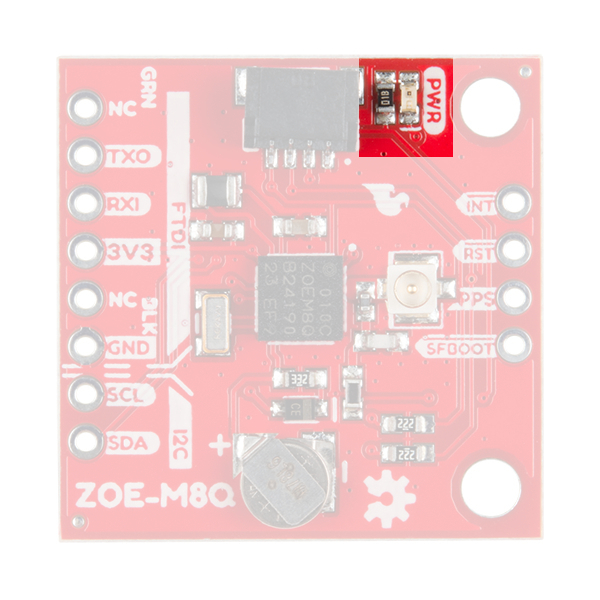
LEDs
There's a single red power LED just above the Qwiic connector to indicate that the board is powered.
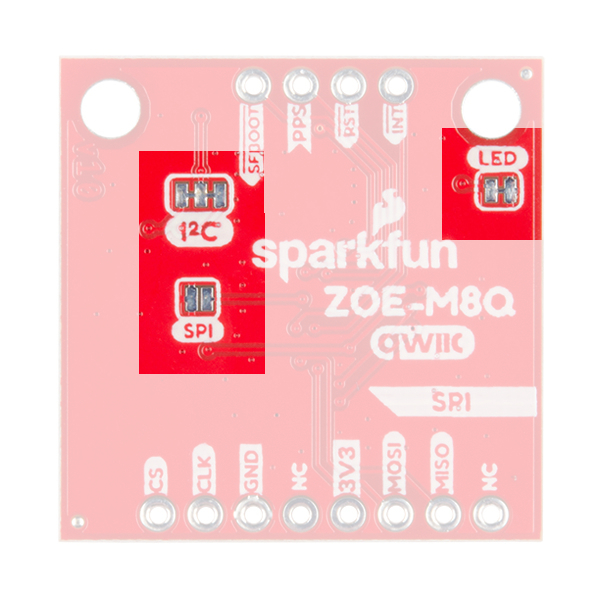
Jumpers
There are three jumpers on the underside of the product, each labeled with its function. The first in the top left of the picture is a three way jumper labeled I²C that connects two pull-up resistors to the I2C data lines. If you have many devices on your I2C data lines, then you may consider cutting these. To the right of that jumper at the very edge of the board is the LED jumper. If you cut this trace it will disconnect the Power LED on the topside of the board. Finally, at the lower left is the SPI jumper that when closed enables SPI communication. The board defaults to I2C and Serial so close that if you'd rather get your NMEA data over SPI.
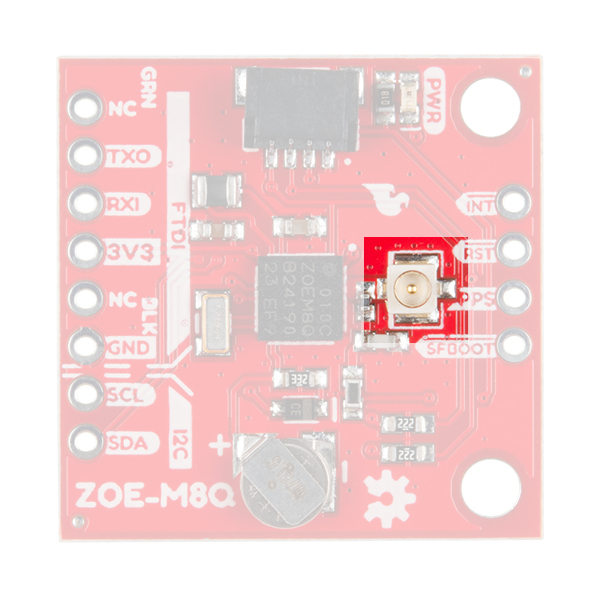
U.FL Connector
The U.FL connector on the board is where you will plug in your antenna. This is a compact connector for RF antennas, that has the same function as the traditional SMA connector. You may be more familiar and even own some antennas that use SMA connectors; never fear, we carry a U.FL to SMA cable adapter. Check out our tutorial on using U.FL connectors, if this be your first.
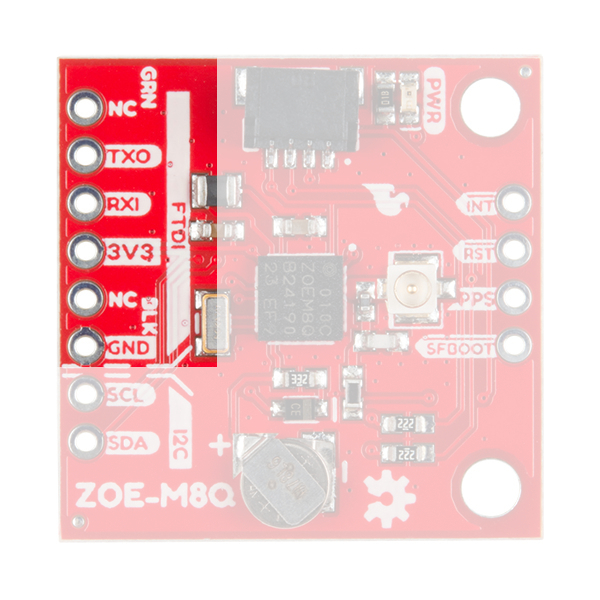
FTDI Header
At the bottom of the board we have the traditional pinout for an FTDI header. Make sure that the FTDI that you use is 3.3V and not 5V! Also, double check that your baud rate is configured to 9600bps.
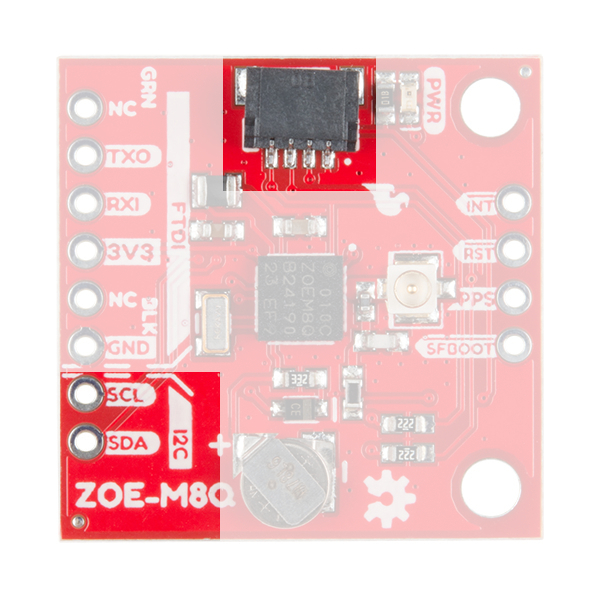
Qwiic and I2C
Next to the FTDI header at the bottom of the board, there are two pins labeled SDA and SCL which indicates the I2C data lines. Similarly you can just use the Qwiic connector on the left side of the picture. The Qwiic ecosystem is made for fast prototyping by removing the need for soldering. All you need to do is plug a Qwiic cable into the Qwiic connector and voila!
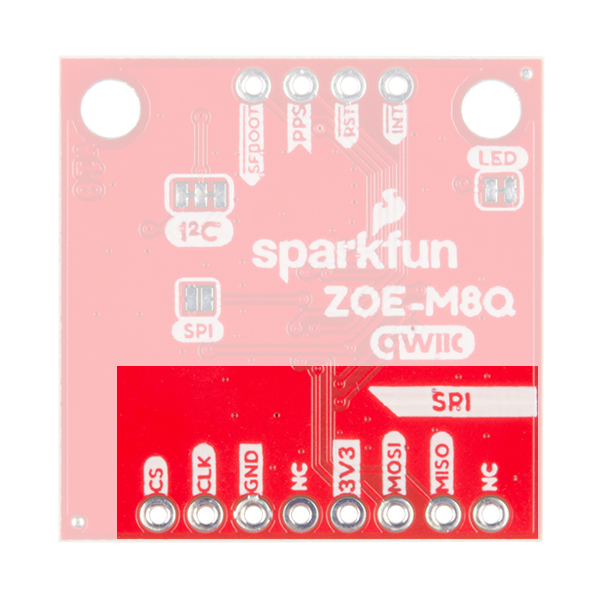
SPI Header
This sets the ZOE-M8Q apart from the SAM-M8Q. On the underside of the product as mentioned above, is a jumper that can be closed to allow for SPI communication. The header is labeled for the pinout for SPI.
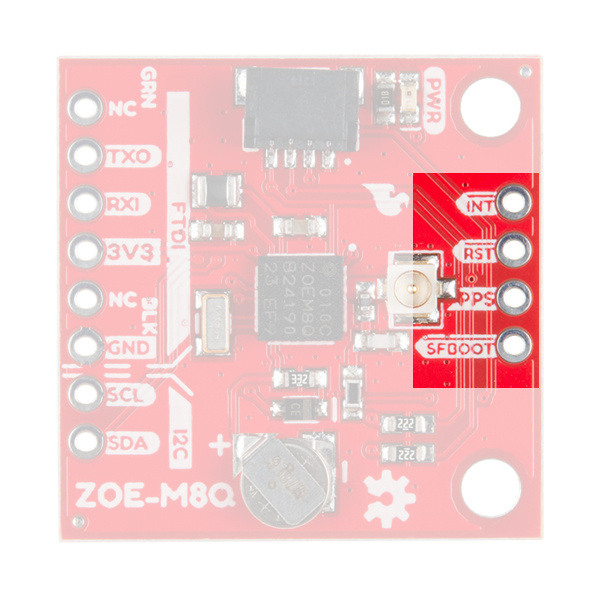
Broken Out Pins
There are four other pins broken out: Pulse per second PPS, Reset RST, Safeboot SAFE, and finally the interrupt pin INT. The first pin PPS outputs pulse trains synchronized with the GNSS or UTC time grid. The signal defaults to once per second but is configurable over a wide range. Read the u-blox Receiver Protocol Specification in the Resources tab for more information. The reset pin resets the chip. The next pin, SAFE is used to start up the IC in safe boot mode. The final pin INT can be used to wake the chip from power save mode.
GNSS Capabilities
The ZOE-M8 is able to connect to up to three different GNSS constellations at a time making it very accurate for its size. Below are the listed capabilities of the GNSS unit.
| GNSS | GPS and GLONASS | GPS | GLONASS | BeiDou | Galileo | ||
|---|---|---|---|---|---|---|---|
| Horizontal Position Accuracy | 2.5m | 2.5m | 4m | 3m | 3m | ||
| Max Navigation Update Rate | ROM | 10Hz | 18Hz | 18Hz | 18Hz | 18Hz | |
| Flash | 5Hz | 10Hz | 10Hz | 10Hz | 10Hz | ||
| Time-To-First-Fix | Cold Start | 26s | 29s | 30s | 34s | 45s | |
| Hot Start | 1s | 1s | 1s | 1s | 1s | ||
| Sensitivity | Tracking and Navigation | -167dBm | -166dBm | -166dBm | -160dBm | -159dBm | |
| Reacquisition | -160dBm | -160dBm | -156dBm | -157dBm | -153dBm | ||
| Cold Start | -148dBm | -148dBm | -145dBm | -143dBm | -138dBm | ||
| Hot Start | -157dBm | -157dBm | -156dBm | -155dBm | -151dBm | ||
| Velocity Accuracy | 0.05m/s | ||||||
| Heading Accuracy | 0.3 degrees |
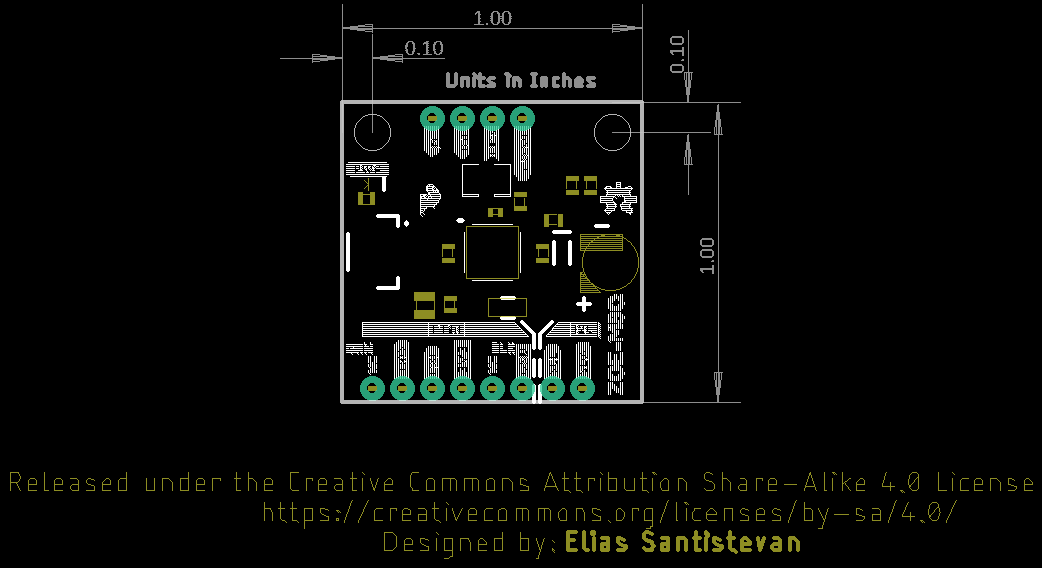
Board Dimensions
The board uses the typical Qwiic board dimension of 1.0"x1.0" . Due to the size of the board and components, there are two mounting holes on the board.