RedBot Assembly Guide
This Tutorial is Retired!
This tutorial covers concepts or technologies that are no longer current. It's still here for you to read and enjoy, but may not be as useful as our newest tutorials.
 SFUptownMaker,
SFUptownMaker,  HelloTechie
HelloTechie {kind=link}
Motors
In this section, you will be placing the two motors on the bottom side of the bottom chassis piece. If you are using the RedBot Sensor - Wheel Encoder, please play close attention to what chassis side you are placing the motors on.
Locate the following:
- 1x Bottom Chassis Piece
- 4x Motor Holders
- 2x Motors
- 4x M3*30 Screws
- 4x M3 Nuts
- 2x Encoder Wheels
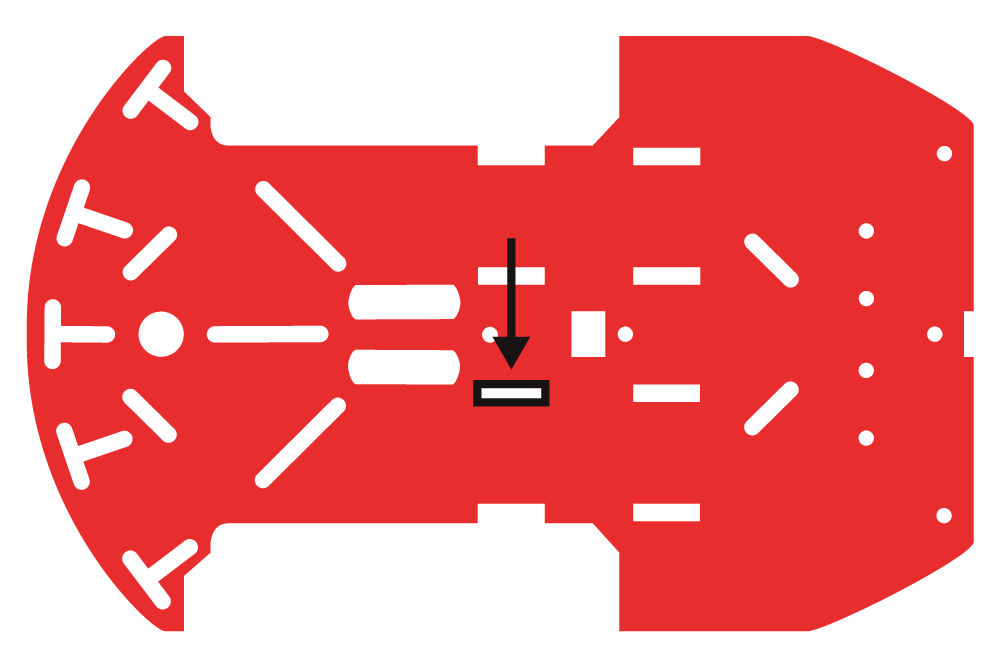
Locate the correct location on the bottom chassis piece.
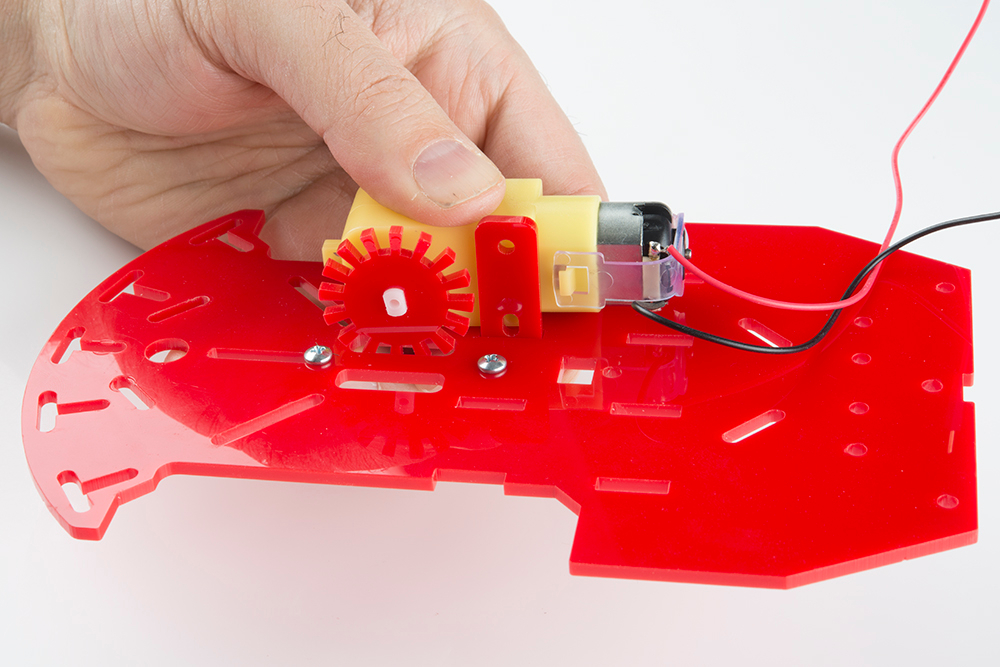
Place one of the motor holders through the right opening in the chassis. If you are using the RedBot Sensor - Wheel Encoder, make sure you are on the top side of the chassis piece. The top side will have the 4-40 hex nuts showing.
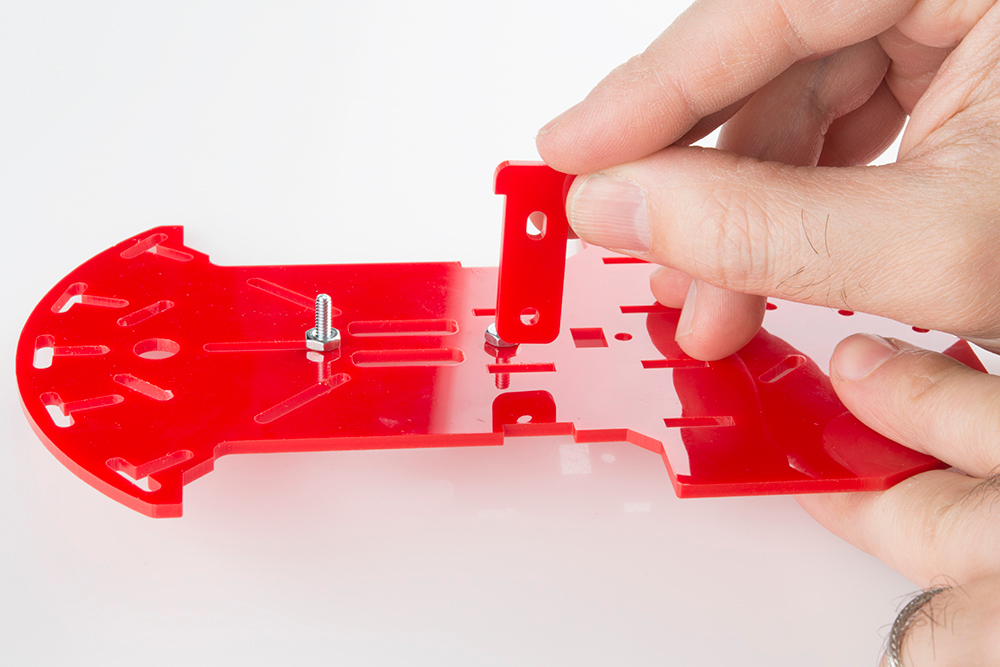
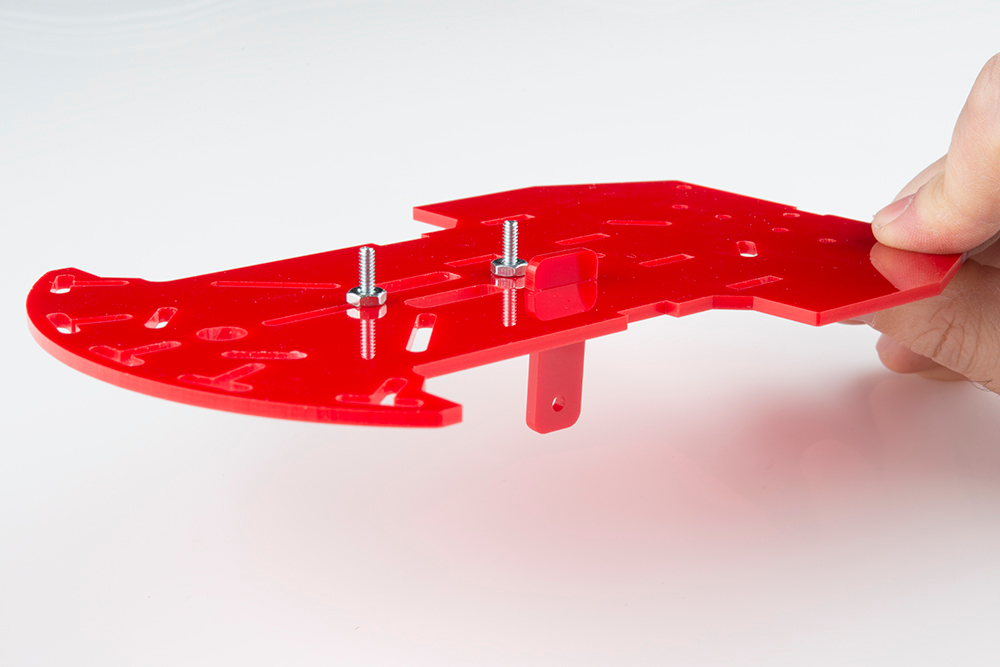
Push the motor holder all the way down.
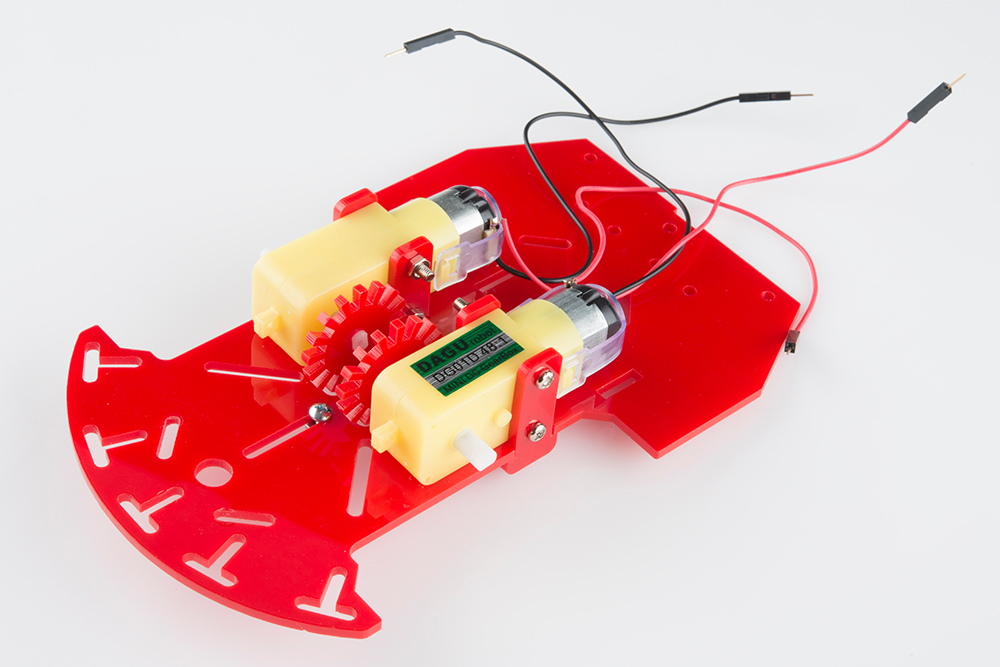
Place the first motor on the bottom side of the chassis piece. Line up the two motor holes with the two motor holder holes. Make sure that the red wire is on top and away from the chassis piece.

If you are adding wheel encoders to your RedBot, do so now. If not, ignore the encoder (the red gear looking piece) in the following pictures. Make sure the encoder wheel fits in the chassis opening without touching the opening's sides.
Now you can add the second motor holder on the opposite side of the motor.
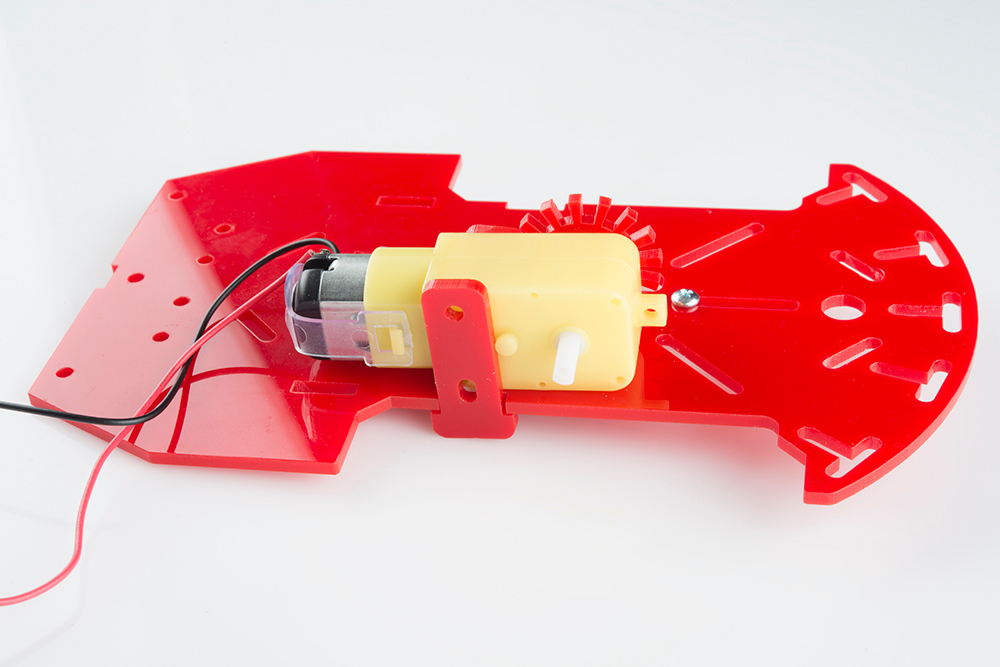
Place M3*30 screw through the two motor holders and the motor. The M3*30 screw head should be on the outside edge side of the chassis.

Add a M3 nut to the M3*30 screw. Do not tighten down the nut all the way yet.
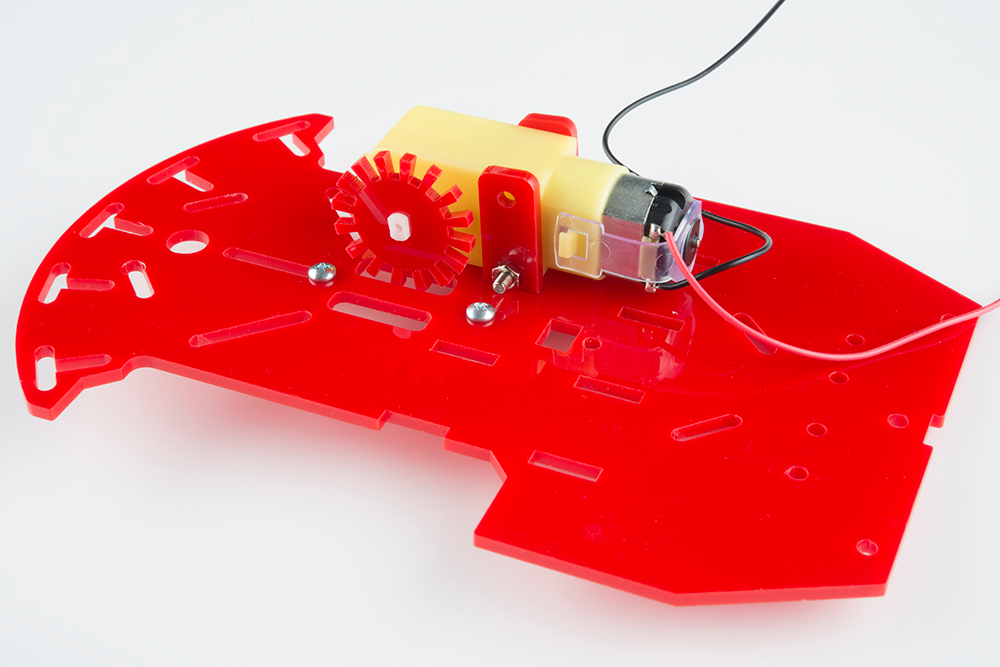
Add the second M3*30 screw and M3 nut to the second hole openings. Now you can tighten both nuts. It helps to hold the nut steady and turn the screw with the screwdriver, threading the screw into the nut.
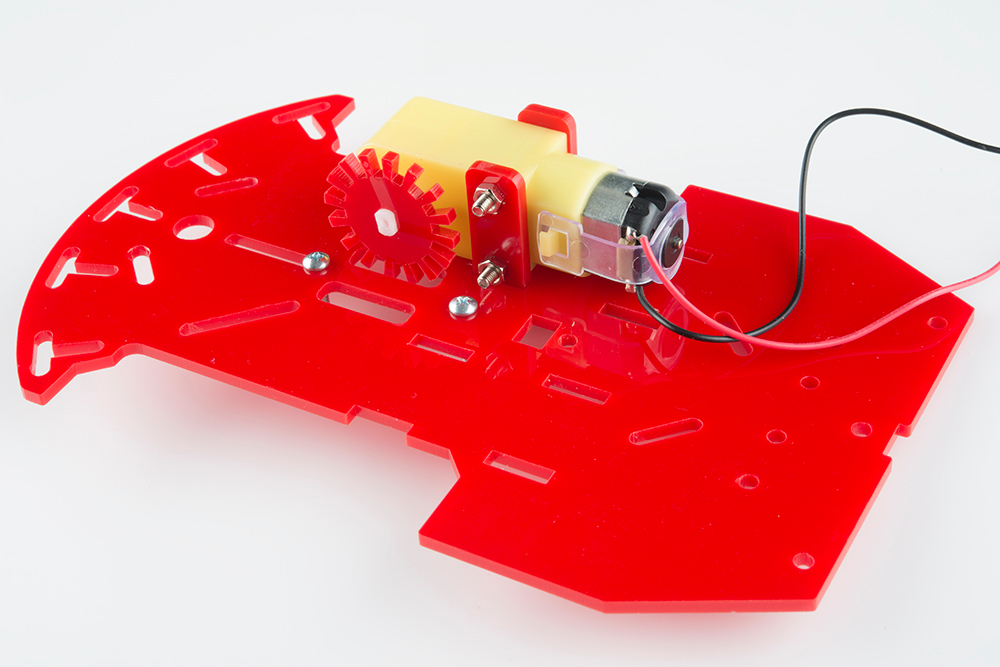
Using the same steps as above, you can now add the second motor on the opposite end on the same bottom side of the chassis piece. You might find it helpful to add the encoder wheel to the motor before placing the motor in the correct spot.