MicroMod GNSS Function Board - NEO-M9N Hookup Guide
Contributors:
 bboyho,
bboyho,  Elias The Sparkiest
Elias The Sparkiest
bboyho, Elias The Sparkiest {kind=link}
Resources and Going Further
Ready to get hands-on with GPS?
We've got a page just for you! We'll walk you through the basics of how GPS works, the hardware needed, and project tutorials to get you started.
Now that you've successfully got your MicroMod GNSS Function Board - NEO-M9N up and running, it's time to incorporate it into your own project! For more information, check out the resources below.
Hardware Documentation
- Schematic (PDF)
- Eagle Files (ZIP)
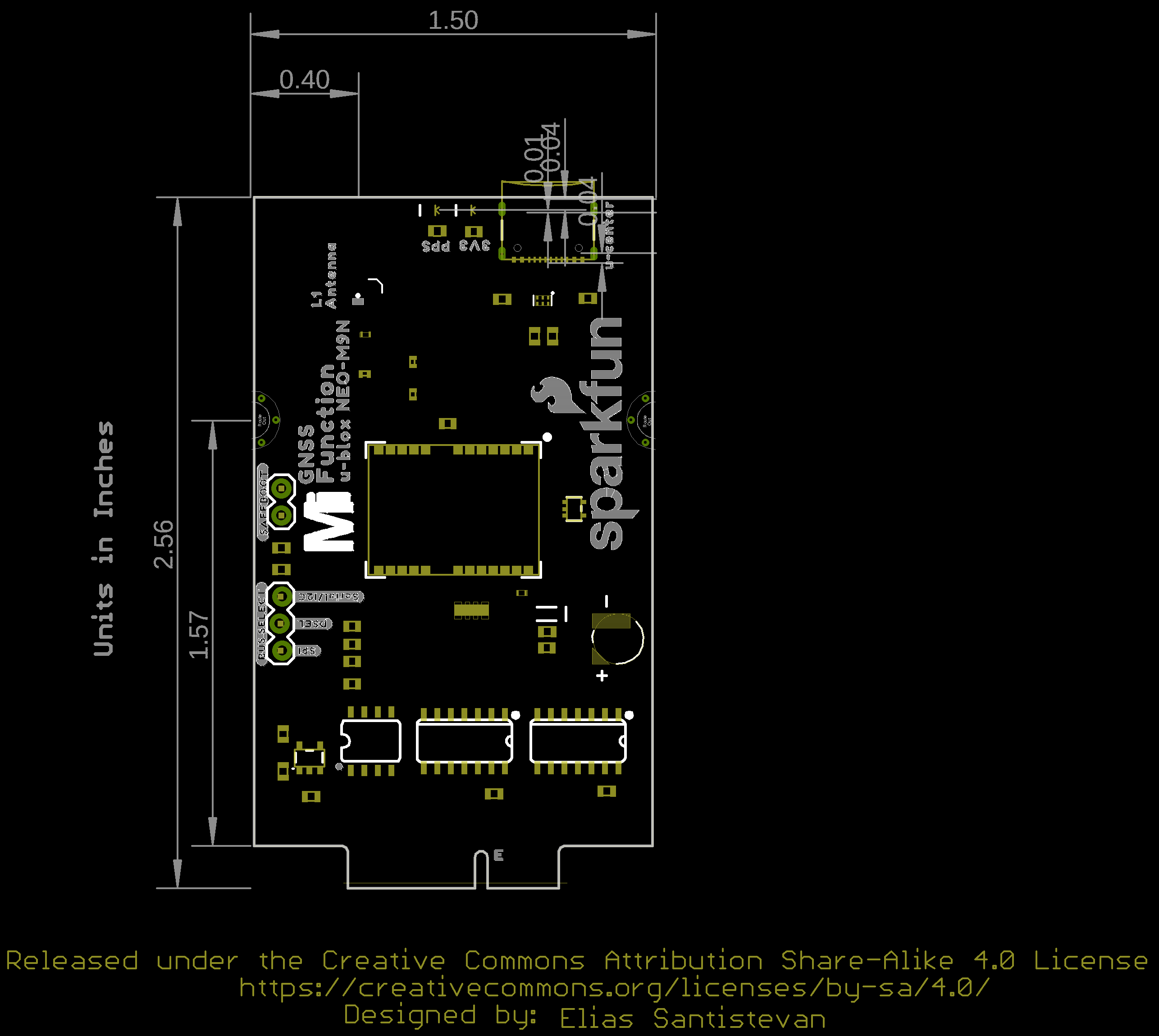
- Board Dimensions (PNG)
- Building a GPS System
- u-blox NEO-M9N Documents & Resources
- SparkFun u-blox GNSS Arduino Library
- GitHub Hardware Repo
- SFE Product Showcase
{kind=link}
MicroMod Documentation
Or check out other tutorials related to GPS and GNSS:
Alphanumeric GPS Wall Clock
This is a GPS controlled clock - a clock you truly never have to set! Using GPS and some formulas, we figure out what day of the week and if we are in or out of daylight savings time.
GPS Logger Shield Hookup Guide
How to assemble and hookup the SparkFun GPS Logger Shield. Never lose track of your Arduino again!
Mini GPS Shield Hookup Guide
A hookup guide for the SparkFun Mini GPS Shield.
Arduino Weather Shield Hookup Guide V12
Read humidity, pressure and luminosity quickly and easily. Add wind speed, direction and rain gauge for full weather station capabilities.