Assembly Guide for SparkFun JetBot AI Kit
This Tutorial is Retired!
While the hardware assambly instructions for the original (beta) version of the Jetbot are still valid; the software instructions are not. Please refer to our latest tutorial, linked below:
View the updated tutorial: Assembly Guide for SparkFun JetBot AI Kit V2.0
 Evan_Double_U
Evan_Double_U {kind=link}
Introduction
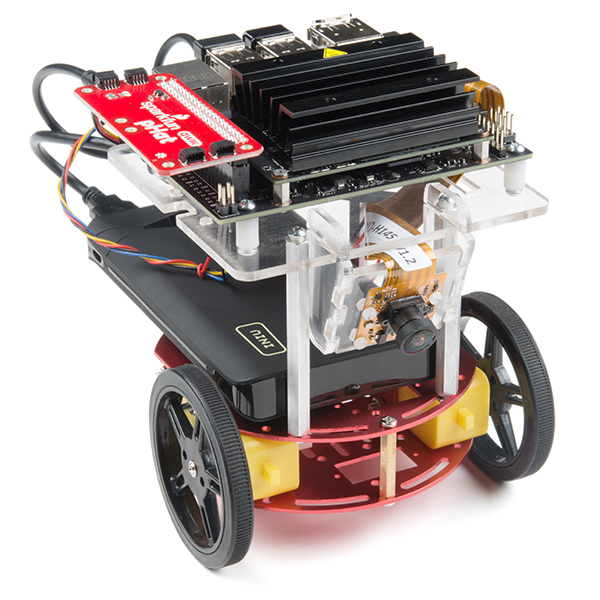
SparkFun’s version of the JetBot merges the industry leading machine learning capabilities of the NVIDIA Jetson Nano with the vast SparkFun ecosystem of sensors and accessories. Packaged as a ready to assemble robotics platform, the SparkFun JetBot Kit requires no additional components or 3D printing to get started - just assemble the robot, boot up the Jetson Nano, connect to WiFi and start using the JetBot immediately. This combination of advanced technologies in a ready-to-assemble package makes the SparkFun JetBot Kit a standout, delivering one of the strongest robotics platforms on the market. This guide serves as hardware assembly instructions for the two kits that SparkFun sells; Jetbot including Jetson Nano & the Jetbot add-on kit without the NVIDIA Jetson Nano. The SparkFun JetBot comes with a pre-flashed micro SD card image that includes the Nvidia JetBot base image with additional installations of the SparkFun Qwiic Python library, Edimax WiFi driver, Amazon Greengrass, and the JetBot ROS. Users only need to plug in the SD card and set up the WiFi connection to get started.
Attention: The SD card in this kit comes pre-flashed to work with our hardware and has the all the modules installed (including the sample machine learning models needed for the collision avoidance and object following examples). The only software procedures needed to get your Jetbot running are steps 2-4 from the Nvidia instructions (i.e. setup the WiFi connection and then connect to the Jetbot using a browser). Please DO NOT format or flash a new image on the SD card; otherwise, you will need to flash our image back onto the card.
If you accidentally make this mistake, don't worry. You can find instructions for re-flashing our image back onto the SD card in the software section of the guide
The Jetson Nano Developer Kit offers extensibility through an industry standard GPIO header and associated programming capabilities like the Jetson GPIO Python library. Building off this capability, the SparkFun kit includes the SparkFun Qwiic pHat for Raspberry Pi, enabling immediate access to the extensive SparkFun Qwiic ecosystem from within the Jetson Nano environment, which makes it easy to integrate more than 30 sensors (no soldering and daisy-chainable).
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
Materials

The SparkFun Jetbot Kit contains the following pieces; roughly top to bottom, left to right.
| Part | Qty |
|---|---|
| Circular Robotics Chassis Kit (Two-Layer) | 1 |
| Lithium Ion Battery Pack - 10Ah (3A/1A USB Ports) | 1 |
| Ball Caster Metal - 3/8" | 1 |
| Edimax 2-in-1 WiFi and Bluetooth 4.0 Adapter | 1 |
| Header - male - PTH - 40 pin – straight | 1 |
| 2 in - 22 gauge solid core hookup wire (red) | 1 |
| Shadow Chassis Motor (pair) | 1 |
| Jetson Dev Kit (Optional) | 1 |
| SparkFun JetBot Acrylic Mounting Plate | 1 |
| SparkFun Jetbot image (Pre Flashed) | 1 |
| Leopard Imaging 145 FOV Camera | 1 |
| Screw Terminals 2.54mm Pitch (2-Pin) | 2 |
| SparkFun Micro OLED Breakout (Qwiic) | 1 |
| SparkFun microB USB Breakout | 1 |
| SparkFun Serial Controlled Motor Driver | 1 |
| Breadboard Mini Self-Adhesive Red | 1 |
| SparkFun Qwiic HAT for Raspberry Pi | 1 |
| SparkFun JetBot Acrylic sidewall for camera mount | 2 |
| SparkFun JetBot Acrylic Camera mount & 4x nylon mounting hardware | 1 |
| Qwiic Cable - 100mm | 1 |
| Qwiic Cable - Female Jumper (4-pin) | 1 |
| Wheels & Tires - included as part of circular robotics chassis | 2 |
| USB Micro-B Cable - 6" | 2 |
| Dual Lock Velcro | 1 |

| Part | Qty |
|---|---|
| Hex Standoff #4-40 Alum 2-3/8" | 3 |
| Standoff - Nylon (4-40; 3/8in.) | 10 |
| 1/4" Phillips Screw with 4-40 Thread | 20 |
| Machine Screw Nut - 4-40 | 10 |
| Circular Robotics Chassis Kit (Two-Layer) Hardware | 1 |
Recommended Tools
We did not include any tools in this kit because if you are like us you are looking for an excuse to use the tools you have more than needing new tools to work on your projects. That said, the following tools will be required to assemble your SparkFun Jetbot.
- Small phillips & small flat head head screwdriver will be needed for chassis assembly & to tighten the screw terminal connections for each motor. We reccomend the Pocket Screwdriver Set; TOL-12268.
- Pair of scissors will be needed to cut the adhesive Dual Lock Velcro strap to desired size; recommended, but not essential..
- Soldering kit for assembly & configuration of the SparkFun Serial Controlled Motor Driver - example TOL-14681
Optional- adjustable wrench or pliers to hold small components (nuts & standoffs) in place while tightening screws; your finger grip is usually enough to hold these in place while tightening screws & helps to ensure nothing is over tightened.
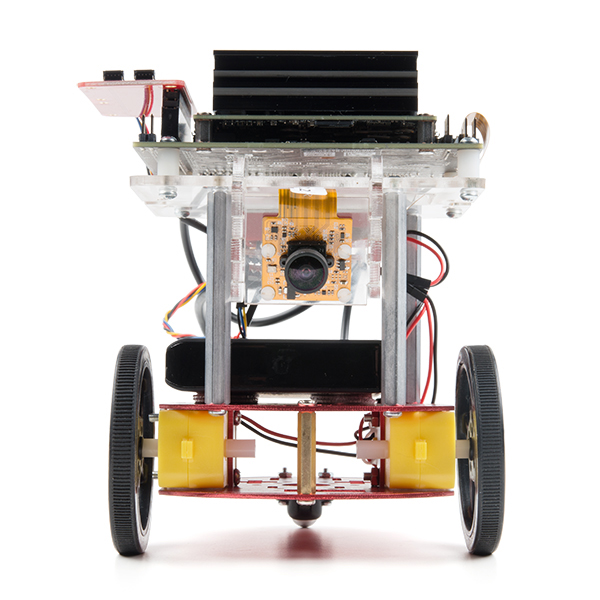
A Note About Directions
When we talk about the "front," or "forward" of the JetBot, we are referring to direction the camera is pointed when the Jetbot is fully assembled. "Left" and "Right" will be from the perspective of the SparkFun Jetbot.