SparkFun Line Follower Array Hookup Guide
Contributors:
 MTaylor
MTaylor
MTaylor {kind=link}
Introduction
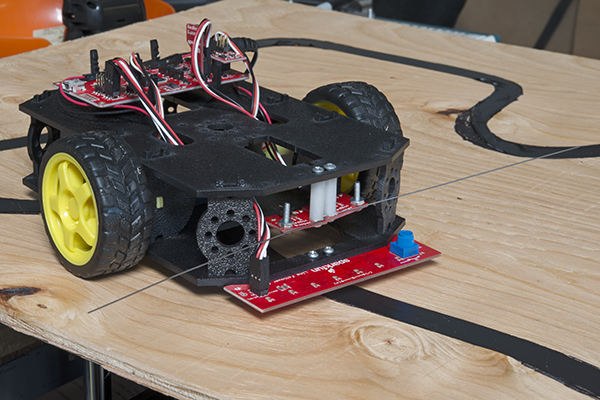
The Line Follower Array is is an array of eight IR sensors that are configured and read as digital bits! In our laboratories, the RedBot shadow chassis was used as a test platform, but this product was designed as an add-on for any bot. The array features visible LEDs, so you can see what the robot sees, brightness control right on the board, and an I2C interface for reading and power control.
Features
- 8 sensor eyes (QRE1113, like in our line sensor breakout)
- I2C interface
- Adjust IR brightness on the fly with a knob
- Switch IR on and off with software
- Switch visual indicators on and off with software
- Invert dark/light sight with software
- Based on the SX1509 I/O expander
Covered In this Tutorial
This tutorial will help get the line follower array connected to your bot with the Arduino IDE over I2C. It is split into the following sections:
- Hardware Overview -- An overview of the physical board and electrical characteristics.
- Hardware Assembly -- Attaching the sensor to a 328p based micro.
- Setting the Jumpers -- Describes the board's jumper configurations.
- Installing the SparkFun Line Follower Array Arduino Library -- Where to get the library for the array.
- Core Functions of the Arduino Library -- Describes the basic reading and configuration of the array.
- Extra Library Function: The Circular Buffer -- The library has a hidden feature! Use a circular buffer to log data for computation.
- Example Sketches -- Test out the sensor on your desk or try a line following example on your robot.
Suggested Reading
The array acts as a stand alone I2C device pretty well. If you want to learn more about I2C or are using the RedBot kits, check out this additional material.
- I2C Communication -- The array is controlled over an I2C interface. Learn what that is here.
- RedBot Experiment Guide -- Using the RedBot with red or black chassis? Work through some experiments first in order to get going.
- Line following experiment -- One of the experiments for the RedBot is line following with only three sensors. Working through this experiment revels why eight sensors is better.
- Counting and Converting in Binary -- The sensors correspond to bit positions in a byte. Rusty on conversions? Take a look here.