Qwiic Flex Glove Controller Hookup Guide
 Englandsaurus
Englandsaurus {kind=link}
Hardware Overview
Let's look over a few characteristics of the ADS1015 so we know a bit more about how our glove controller behaves.
| Characteristic | Range |
|---|---|
| Operating Voltage | 2.0V - 5.5V |
| Operating Temperature | -40°C - 125°C |
| Resolution | 12 bit |
| Sample Rate | 128 Hz - 3.3 kHz |
| Current Consumption | 150 µA (Typ.) |
| I2C Address | 0x48 (default), 0x49, 0x4A, 0x4B |
Pins
The characteristics for the pins of the Qwiic flex glove controller are outlined in the table below.
| Pin Label | Pin Function | Input/Output | Notes |
|---|---|---|---|
| 3.3V | Power Supply | Input | Should be between 2.2V - 3.6V |
| GND | Ground | Input | 0V/common voltage. |
| SDA | I2C Data Signal | Bi-directional | Bi-directional data line. Voltage should not exceed power supply (e.g. 3.3V). |
| SCL | I2C Clock Signal | Input | Master-controlled clock signal. Voltage should not exceed power supply (e.g. 3.3V). |
Optional Features
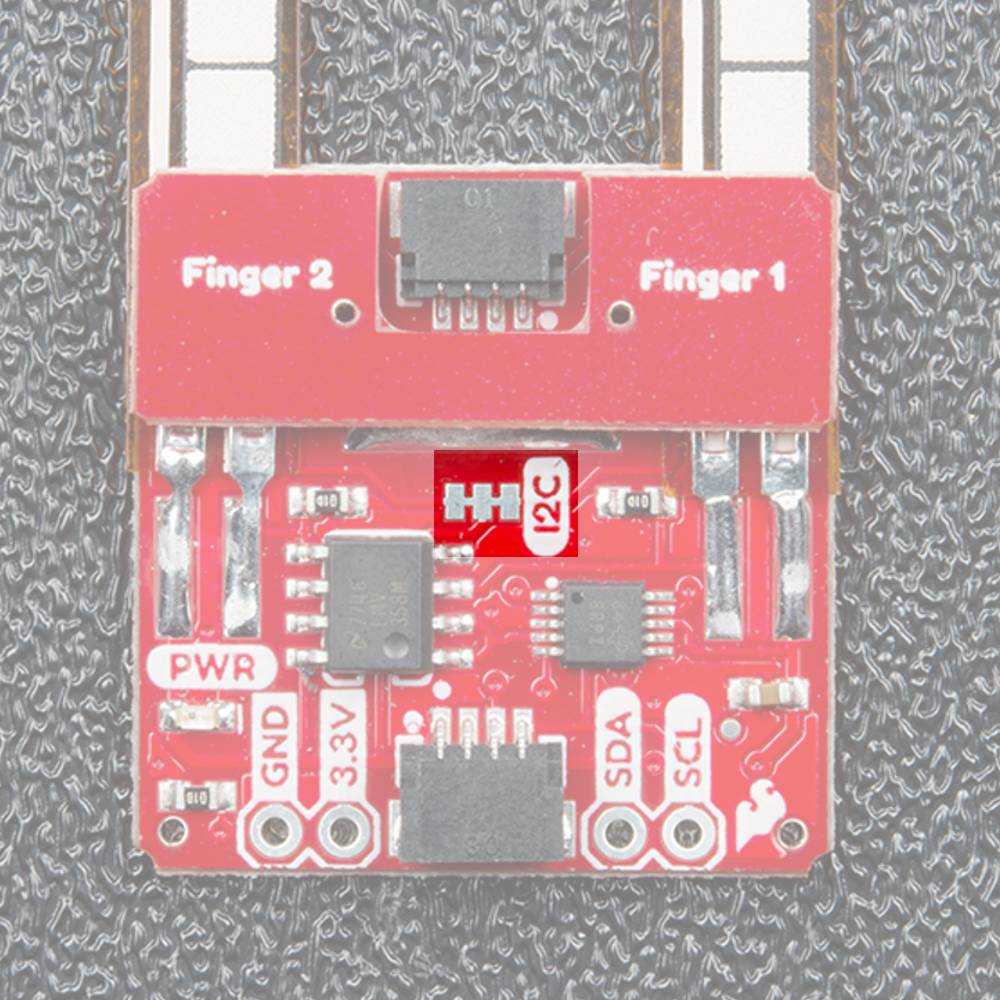
The Qwiic Flex Glove controller has onboard I2C pull up resistors; if multiple sensors are connected to the bus with the pull-up resistors enabled (which they most likely will be if you're creating a full set of gloves), the parallel equivalent resistance will create too strong of a pull-up for the bus to operate correctly. As a general rule of thumb, disable all but one pair of pull-up resistors if multiple devices are connected to the bus. If you need to disconnect the pull up resistors they can be removed by cutting the traces on the corresponding jumpers highlighted below.
The I2C address of the board can be changed using the jumpers on the back of the board. The address selection pin is connected to the center pad of each jumper, the below table shows the addresses available when the address selection pin is tied to each of the 4 available pads.
| Pin | Address |
|---|---|
| GND | 0x48 (Default) |
| VCC | 0x49 |
| SDA | 0x4A |
| SCL | 0x4B |
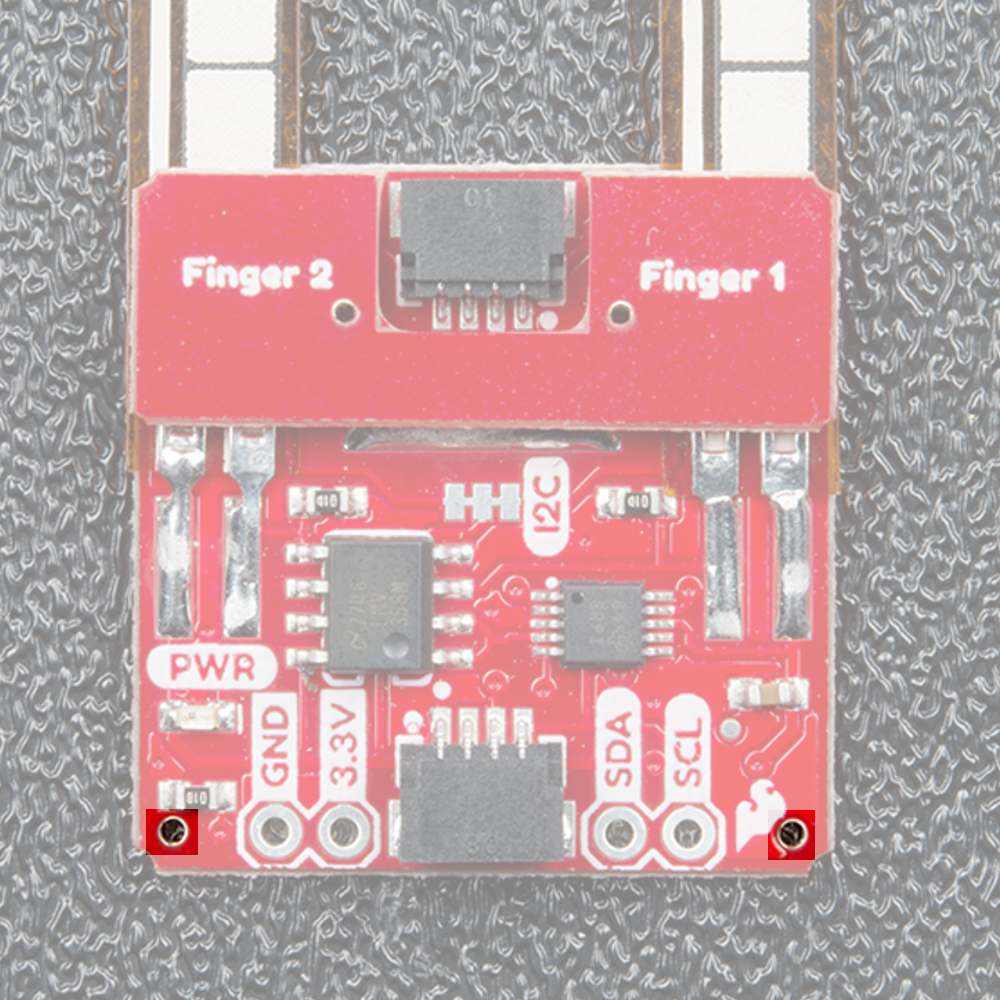
The location of the jumpers is shown in the below image.

The holes in the bottom corners of the board are used for sewing the board into the gloves of your choice.
Make sure you don't crease the flex sensors as this will break the sensor!