LSM9DS1 Breakout Hookup Guide
 jimblom
jimblom {kind=link}
Installing the Arduino Library
We've written a full-featured Arduino library to help make interfacing with the LSM9DS1's gyro, accelerometer, and magnetometer as easy-as-possible. Visit the GitHub repository to download the most recent version of the library, or click the link below:
For help installing the library, check out our How To Install An Arduino Library tutorial. You'll need to move the SparkFun_LSM9DS1_Arduino_Library folder into a libraries folder within your Arduino sketchbook.
The LSM9DS1_Basic_I2C Example
To verify that your hookup works, load up the LSM9DS1_Basic_I2C example by going to File > Examples > LSM9DS1 Breakout > LSM9DS1_Basic_I2C. (If you're using the SPI hookup, load the LSM9DS1_Basic_SPI example instead.)
The default values set by this sketch should work for a fresh, out-of-the-box LSM9DS1 Breakout -- it assumes all of the jumpers on the backside are closed. Upload the sketch, then open up your serial monitor, setting the baud rate to 115200. You should see something like this:
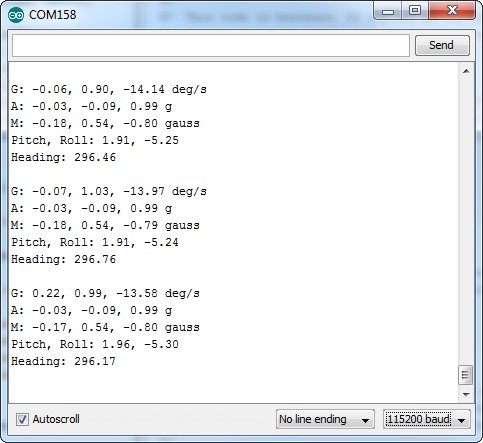
The current reading from each axis on each sensor is printed out, then those values are used to estimate the sensor's orientation. Pitch is the angle rotated around the y-axis, roll is the board's rotation around the x-axis, and heading (i.e. yaw) is the sensor's rotation around the z-axis. Try rotating the board (without pulling out any wires!) to see how the values change.