TFMini - Micro LiDAR Module Hookup Guide
 bboyho
bboyho {kind=link}
Hardware Overview
The sensor works by sending a modulated near-infrared light out. The light that is reflected from the object returns to the sensor's receiver. The distance between the two can be converted using the sensor by calculating the time and phase difference. The distance measured may vary depending on the environment and the reflectivity of object.
Input Power
According to the datasheet (pg 4) the input voltage is between 4.5V-6V. In this tutorial, we will be applying 5V to the sensor.
You may want to consider providing a sufficient power supply when using the sensor in a project.
Logic Levels
While the sensor can be powered at 5V, the serial UART pins are only 3.3V logic. Make sure to use a logic level converter when reading the sensor with a 5V microcontroller.
Pinout
There is a marking next to the polarized connector to indicate the polarity as "J1" as indicated in the image below. This is useful when referencing sensor's pinout.
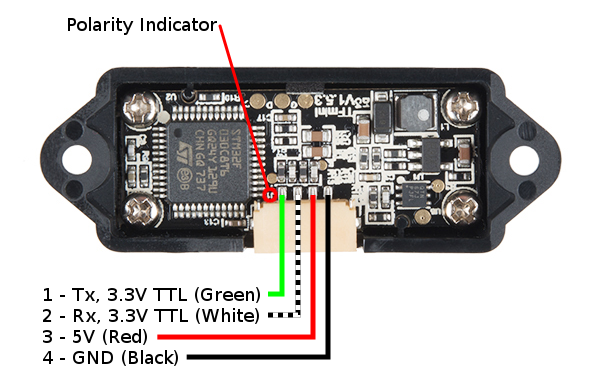
| Pin Number | TFMini Pinout | Wire Color |
|---|---|---|
| 1 | UART_TX (3.3V TTL) | Green |
| 2 | UART_RX (3.3V TTL) | White |
| 3 | 5V | Red |
| 4 | GND | Black |