SparkFun RTK Surveyor Hookup Guide
 Nate, Ell C
Nate, Ell C Introduction
The RTK Surveyor from SparkFun is your one stop shop for high precision geolocation and surveying needs. For basic users, it’s incredibly easy to get up and running and for advanced users, the RTK Surveyor is a flexible and powerful tool.

With just a few minutes of setup, the RTK Surveyor is one of the fastest ways to take centimeter grade measurements.
By connecting your phone to the RTK Surveyor over Bluetooth, your phone can act as the radio link to provide correction data as well as receive the NMEA output from the device. It’s how $10,000 surveying devices have been operating for the past decade - we just made it easier, smaller, and a lot cheaper.
Required Materials
While the RTK Surveyor is nicely enclosed you will need a few cables and antennas to make everything work. We'll go into the specifics of how to hook things together but in general you will need to get a good quality L1/L2 antenna:



Depending on your setup you may want to use your phone for RTCM correction data. If a source is not available online, you will need a 2nd RTK Facet setup in base mode and a radio link connecting the Base to the Rover. We'll go into details but we designed RTK Facet to work with these 100mW 915MHz telemetry radios out of the box. You will also need an adapter cable between the Telemetry Radio and RTK Surveyor.


To charge the RTK Surveyor you will need a USB C cable and a power supply. SparkFun carries a few options:




{kind=link}
Suggested Reading
GNSS RTK is an incredible feat of engineering that has been made easy to use by powerful GNSS receivers such as the ZED-F9P by u-blox (the receiver inside RTK Surveyor). The process of setting up an RTK system will be covered in this tutorial but if you want to know more about RTK here are some good tutorials to brush up on:
What is GPS RTK?
Getting Started with U-Center for u-blox
GPS-RTK2 Hookup Guide
Setting up a Rover Base RTK System
How to Build a DIY GNSS Reference Station
Hardware Overview
The RTK Surveyor is a fully enclosed, preprogrammed device. There are very few things to worry about or configure but we will cover the basics.
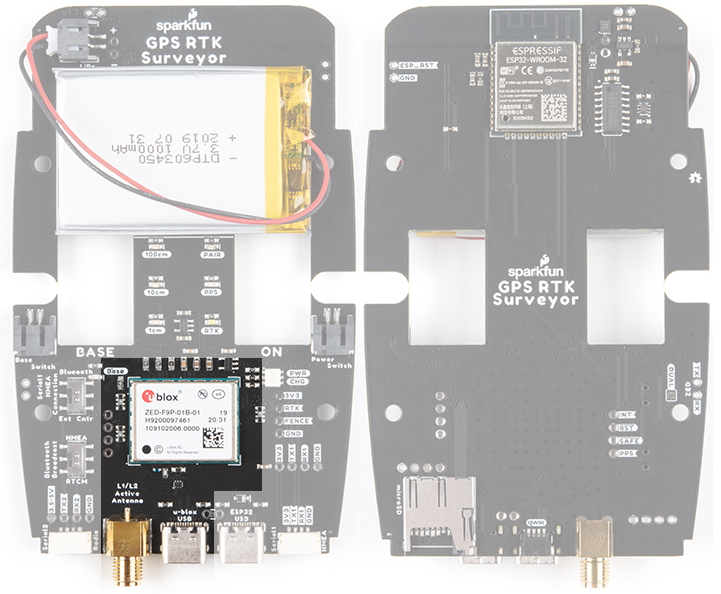
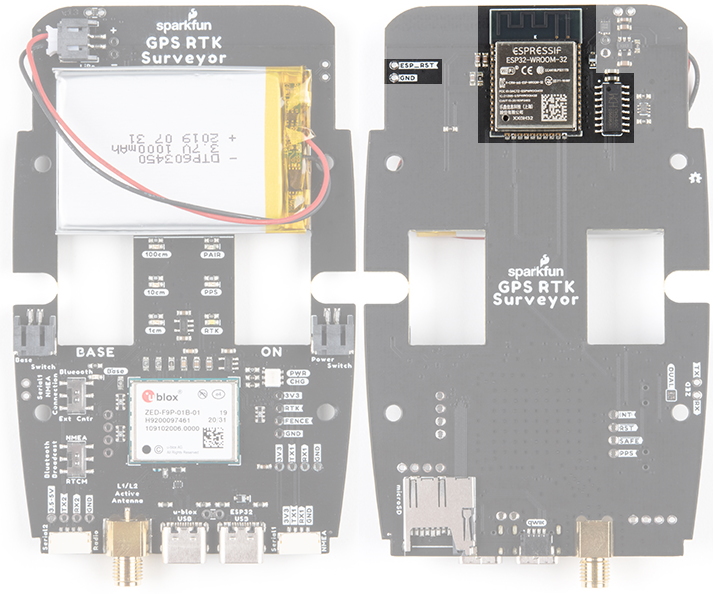
Switches

Setup
This device can be used in three modes:
- GNSS Positioning (~30cm accuracy)
- GNSS Positioning with RTK (1.4cm accuracy)
- GNSS Base Station
When the SETUP switch is set to Rover the device will enter Position mode. RTK Surveyor will receive L1 and L2 GNSS signals from the four constellations (GPS, GLONASS, Galileo, and BeiDou) and calculate the position based on these signals. Similar to a standard grade GPS receiver, the RTK Surveyor will output industry standard NMEA sentences at 4Hz and broadcast them over any paired Bluetooth device at 115200bps. The end user will need to parse the NMEA sentences using commonly available mobile apps, GIS products, or embedded devices (there are many open source libraries). Unlike standard grade GPS receivers that have 2500m accuracy, the accuracy in this mode is approximately 300mm horizontal positional accuracy with a good grade L1/L2 antenna.
When the SETUP switch is set to Rover and RTCM correction data is sent into the radio port or over Bluetooth, the device will automatically enter Positioning with RTK mode. In this mode RTK Surveyor will receive L1/L2 signals from the antenna and correction data from a base station. The receiver will quickly (within a few seconds) obtain RTK float, then fix. The NMEA sentences will have increased accuracy of 14mm horizontal and 10mm vertical accuracy. The RTCM correction data can be obtained from a cellular link to online correction sources or over a radio link to a 2nd RTK Surveyor setup as a base station.
When the SETUP switch is set to Base the device will enter Base Station mode. This is used when the device is mounted to a fixed position (like a tripod or roof). The RTK Surveyor will initiate a survey. After 60 to 120 seconds the survey will complete and the RTK Surveyor will begin transmitting RTCM correction data out the radio port. A base is often used in conjunction with a second unit set to 'Rover' to obtain the 14mm accuracy. Said differently, if you’ve got a radio attached to the base and the rover, you’ll create an RTK system without any other setup and the Rover will output super accurate readings.
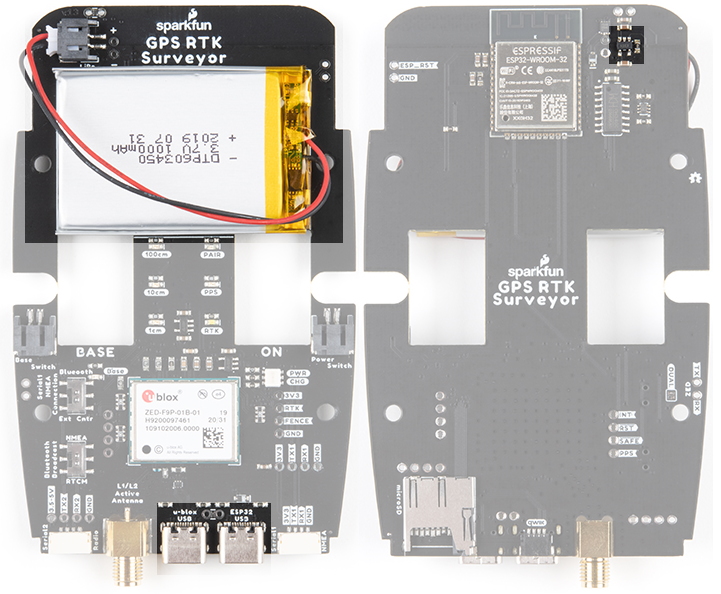
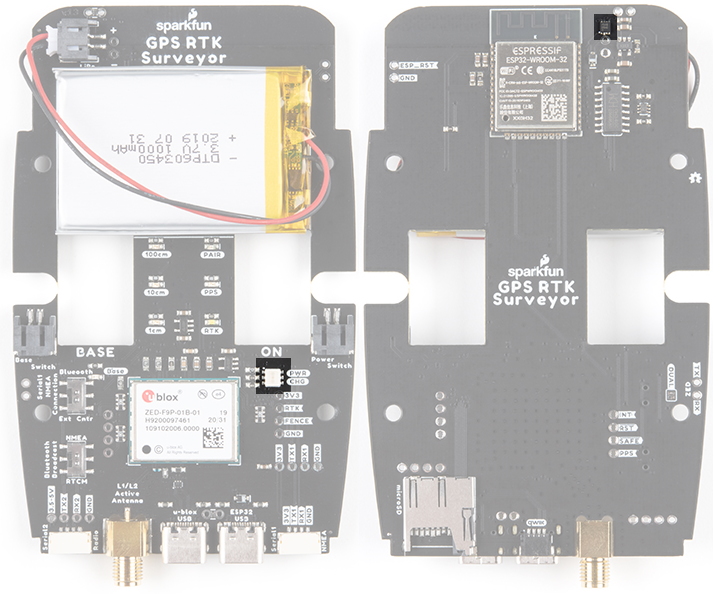
Power
The Power switch is self explanatory. When turned on the LED will turn Green, Yellow, or Red indicating battery level. The RTK Surveyor has a built-in 1000mAh lithium polymer battery that will enable up to 4 hours of field use between charging. If more time is needed a common USB power bank can be attached boosting the field time to 40 hours.
LEDs

There are a variety of LEDs:
- Power - Blue when attached to power and charging / off when fully charged. Green/Yellow/Red when the Power switch is turned on indicating the state of charge of the internal battery.
- RTK - This white LED will be off when no RTCM correction data is received. Blinking indicates RTK Float is achieved. Solid when RTK Fix is achieved.
- PPS - Pulse per second. This yellow LED will blink at 1Hz when GNSS fix is achieved. You’ll see this LED begin blinking anytime the receiver detects enough satellites to obtain a rough location.
- PAIR - Blinks blue when waiting to be paired with over Bluetooth. Solid when a connection is active.
- Horizontal Accuracy 100cm/10cm/1cm - These green LEDs illuminate as the horizontal positional accuracy increases. 100cm will often be achieved in normal positioning mode with a good L1/L2 antenna. 10cm will often be achieved as the first few seconds of RTCM correction data is received, and 1cm will be achieved when a full RTK fix is calculated.
- BASE - This LED will blink red when the SETUP switch is set to Base and a survey is being conducted. It will turn solid red once the survey is complete and the unit begins broadcasting RTCM correction data.
Connectors

Antenna:
This SMA connector is used to connect an L1/L2 type GNSS antenna to the RTK Surveyor. Please realize that a standard GPS antenna does not receive the L2 band signals and will greatly impede the performance of the RTK Surveyor (RTK fixes are nearly impossible). Be sure to use a proper L1/L2 antenna.

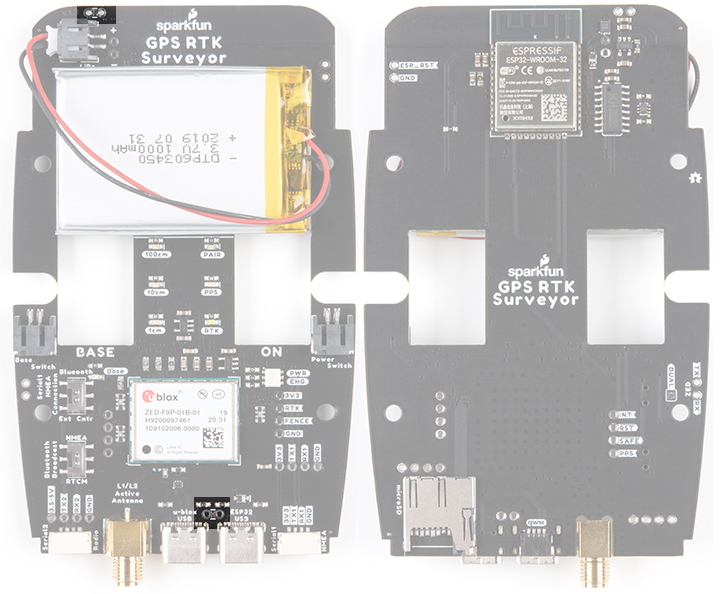
Configure u-blox:
This USB C connector is used for charging the device and/or directly configuring and inspecting the ZED-F9P GNSS receiver using u-center. It’s not necessary in normal operation but is handy for tailoring the receiver to specific applications. As an added perk, the ZED-F9P can be detected automatically by some mobile phones and tablets. If desired, the receiver can be directly connected to a compatible phone or tablet removing the need for a Bluetooth connection.

USB Configure ESP32:
This USB C connector is used for charging the device, configuring the device, and reprogramming the ESP32. Various debug messages are printed to this port at 115200bps and a serial menu can be opened to configure advanced settings.

Radio:
This 4-pin JST connector is used to allow RTCM correction data to flow into the device when it is acting as a rover or out of the device when it is acting as a base. You will most likely connect this port to one of our Serial Telemetry Radios using a JST-GHR-04V to JST-GHR-06V Cable (1.25mm pitch) if you don’t have access to a correction source on the Internet. The pinout is 3.5-5.5V / TX / RX / GND. The connector is a 4-pin locking 1.25mm JST SMD connector (part#: SM04B-GHS-TB, mating connector part#: GHR-04V-S). 3.5V to 5.5V is provided by this connector to power a radio with a voltage that depends on the power source. If USB is connected to the RTK Surveyor then voltage on this port will be 5V (+/-10%). If running off of the internal battery then voltage on this port will vary with the battery voltage (3.5V to 4.2V depending on the state of charge). While the port is capable of sourcing up to 2 amps, we do not recommend more than 500mA. This port should not be connected to a power source.

Data:
This 4-pin JST connector is used to output NMEA sentences over 115200bps serial. Most applications will send the NMEA position data over Bluetooth. Alternatively, this port can be useful for sending position data to an embedded microcontroller or single board computer. The pinout is 3.3V / TX / RX / GND. The connector is a 4-pin locking 1.25mm JST SMD connector (part#: SM04B-GHS-TB, mating connector part#: GHR-04V-S). 3.3V is provided by this connector to power a remote device if needed. While the port is capable of sourcing up to 600mA, we do not recommend more than 300mA. This port should not be connected to a power source.

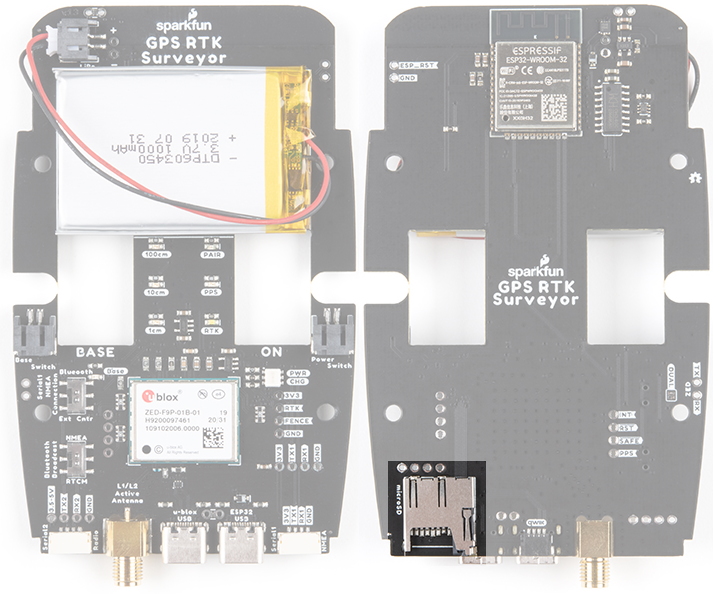
microSD:
This slot accepts standard microSD cards up to 32GB formatted for FAT16 or FAT32. Logging NMEA and RAWX data at up to 4Hz is supported for all constellations.

Qwiic:
This 4-pin Qwiic connector exposes the I2C bus of the ESP32 WROOM module. Currently, there is no firmware support for adding I2C devices to the RTK Surveyor but support may be added in the future.

Power
The RTK Surveyor has a built in 1000mAh battery and consumes approximately 240mA worst case with Bluetooth connection active, GNSS fully tracking, and a 500mW radio broadcasting. This will allow for 4 hours of use in the field. If more time is needed in the field a standard USB power bank can be attached. If a 10,000mAh bank is attached one can estimate 30 hours of run time assuming 25% is lost to efficiencies of the power bank and charge circuit within RTK Surveyor.
The RTK Surveyor can be charged from any USB port or adapter. The charge circuit is rated for 1000mA so USB 2.0 ports will charge at 500mA and USB 3.0+ ports will charge at 1A.
To quickly view the state of charge, turn on the unit. A green LED indicates > 50% charge remaining. A yellow LED indicates > 10% charge remaining. A red LED indicates less than 10% charge remaining.
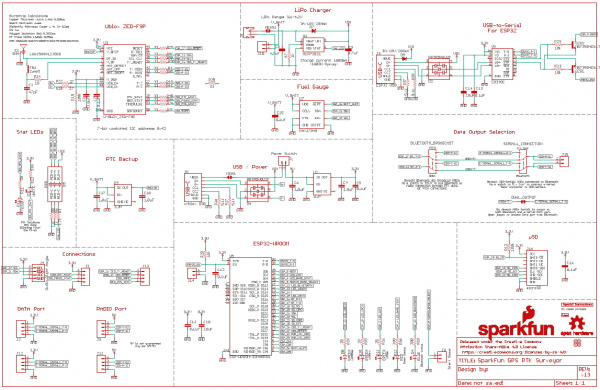
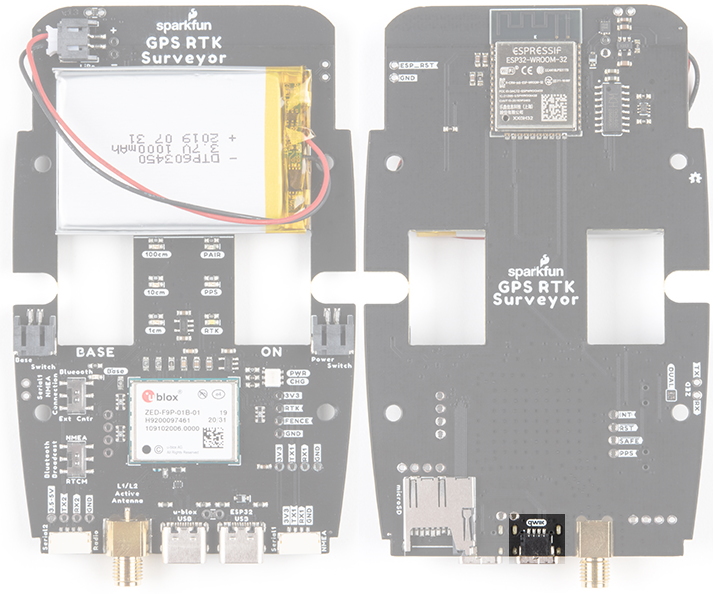
Hardware Overview - Advanced Features
The RTK Surveyor is a hacker’s delight. Under the hood of the RTK Surveyor is an ESP32 WROOM connected to a ZED-F9P as well as some peripheral hardware (LiPo fuel gauge, microSD, etc). It is programmed in Arduino and can be tailored by the end user to fit their needs.
ZED-F9P GNSS Receiver
The ZED-F9P GNSS receiver is configured over I2C and uses two UARTs to output NMEA (UART1) and input/output RTCM (UART2).
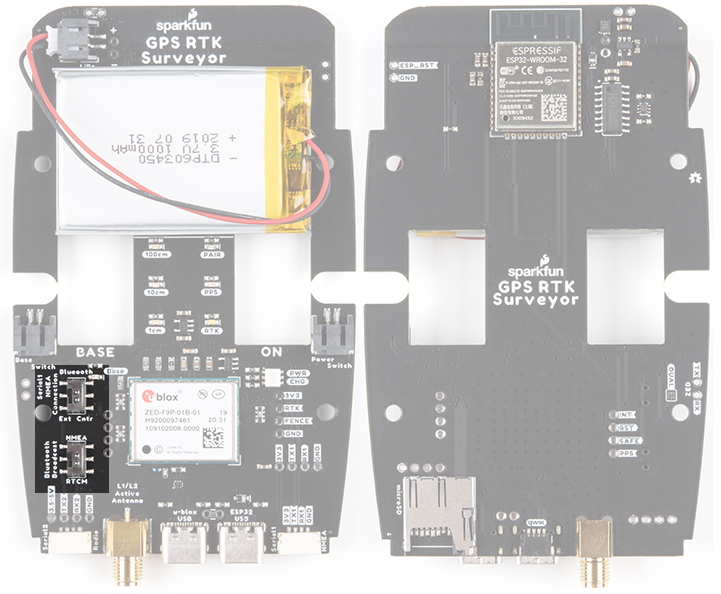
Two internal slide switches control the flow of NMEA and RTCM traffic between the external connectors and the internal BT UART used on the ESP32. Ostensibly the Bluetooth Broadcast switch can be set to pipe RTCM data to the ESP32’s UART (instead of NMEA) so that correction data can be transmitted over Bluetooth. Point to point Bluetooth radio support is not supported because the useful range of Bluetooth is too short for most RTK applications but may be helpful in some advanced applications.
ESP32
The ESP32 uses a standard USB to serial conversion IC (CH340) to program the device. You can use the ESP32 core for Arduino or Espressif’s IoT Development Framework (IDF).
The CH340 automatically resets and puts the ESP32 into bootload mode as needed. However, the reset pin of the ESP32 is brought out to an external 2-pin 0.1” footprint if an external reset button is needed.
Measurement Jumpers
To facilitate the measurement of run, charge, and quiescent currents, two measurement jumpers are included. These are normally closed jumpers combined with a 2-pin 0.1” footprint. To take a measurement, cut the jumper and install a 2-pin header and use banana to IC hook cables to a DMM.
LiPo and Charging
The RTK Surveyor houses a standard 1000mAh 3.7V LiPo. The charge circuit is set to 1A so with an appropriate power source, charging an empty battery should take roughly one hour. USB C on the RTK Surveyor is configured for 2A draw so if the user attaches to a USB 3.0 port, the charge circuit should operate near the 1A max. If a user attaches to a USB 2.0 port, the charge circuit will operate at 500mA.
MAX17048 Fuel Gauge
The MAX17048 is a simple to use fuel gauge IC that gives the user a statement of charge (SOC) that is basically a 0 to 100% report. The MAX17048 has a sophisticated algorithm to figure out what the SOC is based on cell voltage that is beyond the scope of this tutorial but for our purposes, allows us to control the color of the power LED.
Qwiic
A Qwiic connector is exposed on the end of the unit. This allows connection to the I2C bus on the ESP32. Currently the stock RTK Surveyor does not support any additional Qwiic sensors or display but users may add support for their own application.
microSD
A microSD socket is situated on the ESP32 SPI bus. Any microSD up to 32GB is supported. RTK Surveyor supports RAWX and NMEA logging to the SD card. Max logging time can also be set (default is 10 hours) to avoid multi-gigabyte text files. For more information about RAWX and doing PPP please see this tutorial.
Hardware Assembly
The RTK Surveyor was designed to work with low-cost, off the shelf equipment. Here we’ll describe how to assemble a Rover and Base.
Rover
Shown here is the most common RTK Rover setup. A monopole designed for cameras is used. A cell phone holder is clamped to the monopod and the RTK Surveyor is mounted. The ¼” camera thread of the monopole is adapted to ⅝” 11-TPI and a L1/L2 antenna is attached. A Male TNC to Male SMA cable connects the antenna to the RTK Surveyor. No radio is needed because RTCM correction data is provided by a phone over Bluetooth.

We have done lots of testing with the u-blox L1/L2 antenna and it's very good for the price and size. Mounted to a ground plate you will get good results. It's just a bit ungainly when mounted to the top of a monopole. We recommend the 'ufo' style L1/L2 antennas because they have a larger antenna element and a slightly larger ground plane than the u-blox antenna.

If you’re shopping for a monopole (aka monopod), get one that is 65” in length or greater to ensure that the antenna will be above your head. We’ve had good luck with the Amazon Basics brand.

We strongly recommend against using a rigid helical antenna configuration as shown below. The RTK Surveyor is not designed for such configurations and can lead to permanent damage to the antenna connector. The helical antenna becomes a large lever arm. If the unit is dropped this lever is capable of damaging both the SMA connector and where the connector is soldered to the PCB.

If you’re shopping for a cell phone clamp be sure to get one that is compatible with the diameter of your monopole and has a knob to increase clamp pressure. Our monopole is 27mm in diameter and we’ve had a good experience with this clamp and this clamp. Your mileage may vary.

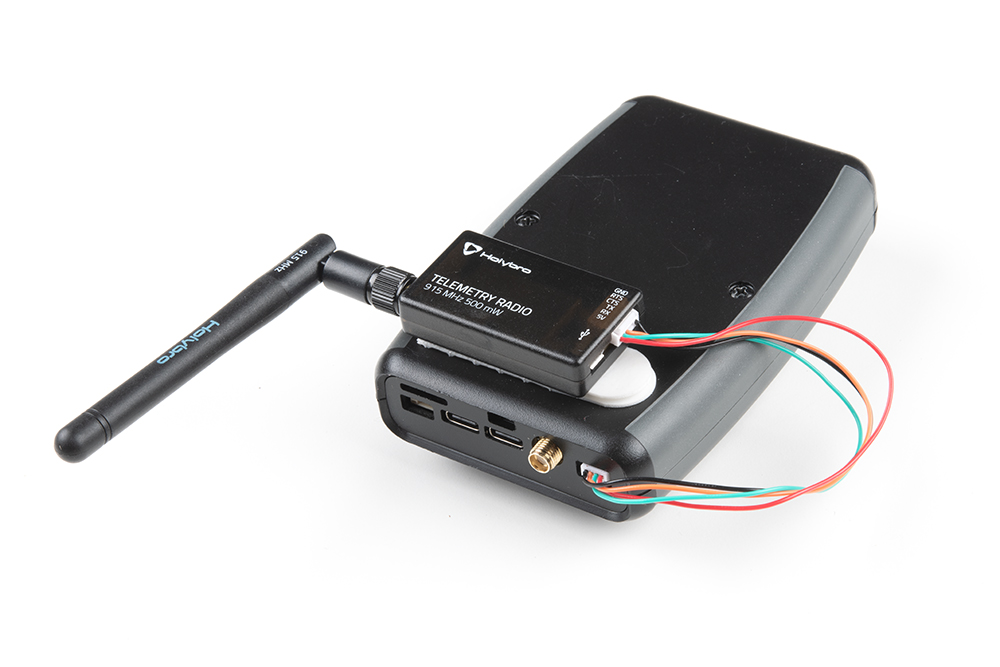
If you are receiving RTCM correction data over a radio link it’s recommended that you attach a radio to the back of the RTK Surveyor.

Picture hanging strips from 3M make a nice semi-permanent mount. Plug the 4-pin to 6-pin JST cable included with the RTK Surveyor from the Radio port to either of the Serial Telemetry Radios (shipped in pairs). We really love these radios because they are paired out of the box, either can send or receive (so it doesn't matter which radio is attached to base or rover) and they have remarkable range. We achieved over a mile range (nearly 1.5 miles or 2.4km) with the 500mW radios and a big 915MHz antenna on the base (see this tutorial for more info).
Temporary Base
A temporary or mobile base setup is needed when you are in the field too far away from a correction source and/or cellular reception. A 2nd RTK Surveyor is mounted to a tripod and it is configured to complete a survey-in (aka, locate itself), then begin broadcasting RTCM correction data. This data (~1000 bytes a second) is sent to the user's connected radio of choice. For our purposes, the 915MHz 500mW telemetry radios are used because they provide what is basically a serial cable between our base and rover.

Any tripod with a ¼” camera thread will work. The Amazon Basics tripod works well enough but is a bit light weight and rickety. A cell phone holder is clamped to the tripod and the RTK Surveyor is held in the clamp. The ¼” camera thread is adapted to ⅝” 11-TPI and a L1/L2 antenna is attached. A Male TNC to Male SMA adapter connects the antenna to the RTK Surveyor.
Once the base has been setup with a clear view of the sky, move the Setup switch to "Base" and turn the unit on. The red LED will blink for 60-120 seconds. Once the survey is complete the red LED will be constantly illuminated and RTCM data will begin to be broadcast. You can verify this by viewing the LEDs on the telemetry radio (a small red LED will blink when serial data is received from the RTK Surveyor). The RTK Surveyor is designed to follow the u-blox recommended survey-in of 60s and a mean 3D standard deviation of 5m of all fixes. If a survey fails to achieve these requirements it will auto-restart after 10 minutes.
More expensive surveyor bases have a ⅝” 11-TPI thread but the top of the surveyor base will often interfere with the antenna’s TNC connector. If you chose to use a surveyor’s ‘stick’ be sure to obtain a ⅝” extender plate to raise the antenna at least an inch.
If you’re shopping for a cell phone clamp be sure to get one that is compatible with the diameter of your tripod and has a knob to increase clamp pressure. Our tripod is 18mm in diameter and we’ve had a good experience with this clamp. Your mileage may vary.

Note: A mobile base station works well for quick trips to the field. However, the survey-in method is not recommended for the highest accuracy measurements because the positional accuracy of the base will directly translate to the accuracy of the rover. Said differently, if your base's calulcated position is off by 100cm, so will every reading your rover makes. If you’re looking for maximum accuracy consider installing a static base with fixed antenna. We were able to pinpoint the antenna on the top of SparkFun with an incredible accuracy +/-2mm of accuracy using PPP!
{kind=link}
Bluetooth and NTRIP
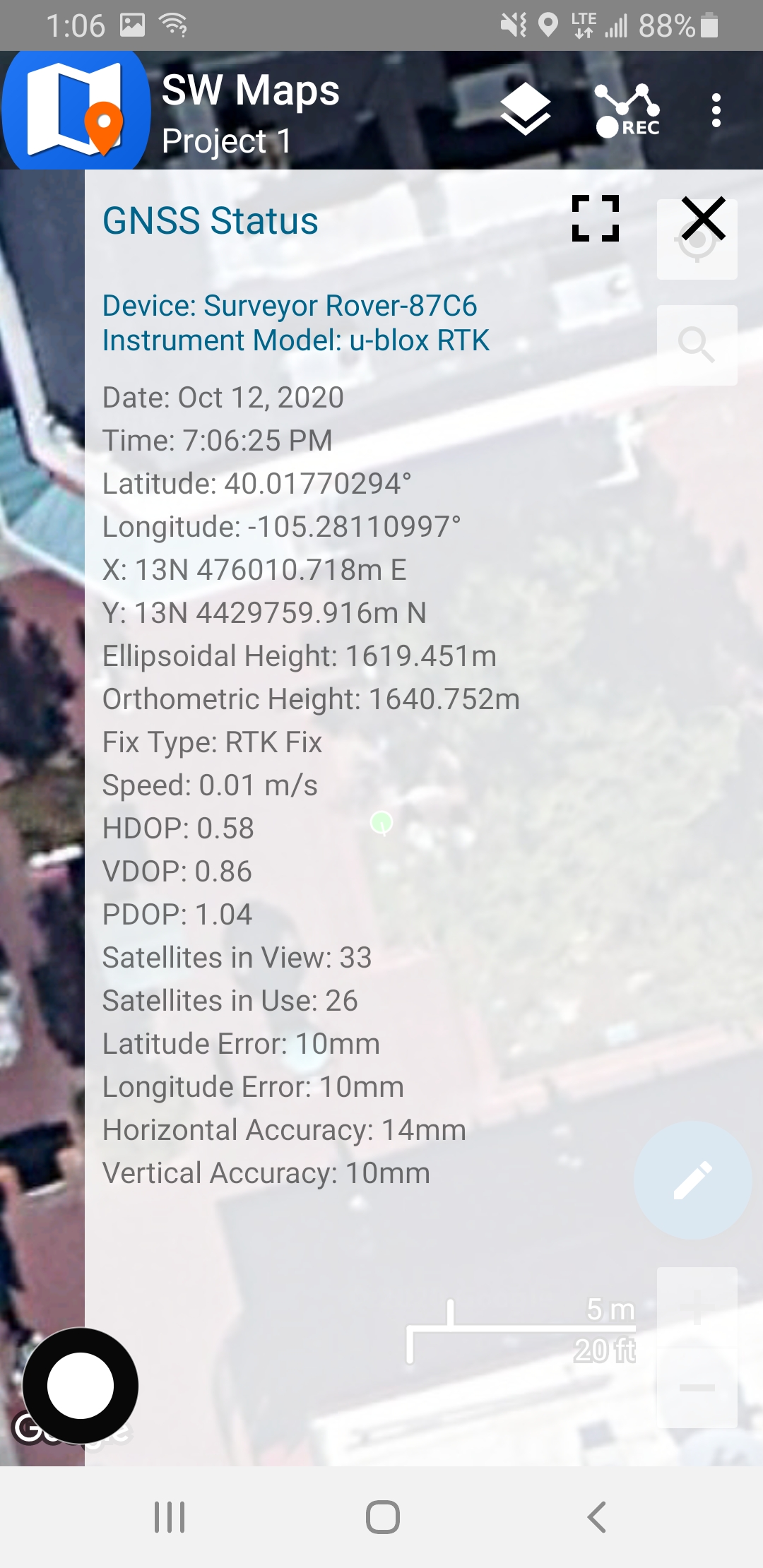
The RTK Surveyor transmits full NMEA sentences over Bluetooth serial port profile (SPP) at 4Hz and 115200bps. This means that nearly any GIS application that can receive NMEA data over serial port (almost all do) can be used with the RTK Surveyor. As long as your device can open a serial port over Bluetooth (also known as SPP) your device can retrieve industry standard NMEA positional data. The following steps show how to use SW Maps but the same steps can be followed to connect any serial port based GIS application.
Please see the SparkFun RTK Product Manual for step by step instructions.
System Configuration
Out of the box, the SparkFun RTK products are exceptional GNSS receivers out-of-box and can be used with little or no configuration. Additionally, the line of RTK products from SparkFun are immensely configurable. Please see the SparkFun RTK Product Manual for detailed descriptions of all the available features on the RTK products.
Firmware Updates and Customization
The RTK Surveyor is open source hardware meaning you have total access to the firmware and hardware.
From time to time SparkFun will release new firmware for the RTK product line to add and improve functionality. We've made updating the firmware as easy as possible. Please see Updating RTK Firmware for a step by step tutorial.
Troubleshooting
If you need technical assistance and more information on a product that is not working as you expected, we recommend heading on over to the SparkFun Technical Assistance page for some initial troubleshooting.
If you don't find what you need there, the SparkFun Forums are a great place to find and ask for help. If this is your first visit, you'll need to create a Forum Account to search product forums and post questions.
Resources and Going Further
We hope you enjoy using the RTK Surveyor as much as we have!
Here are the pertinent technical documents for the RTK Surveyor:
- ZED-F9P GNSS Receiver Datasheet
- MAX17048 Fuel Gauge IC
- SparkFun RTK Surveyor GitHub Repo (contains the open source hardware electronics and enclosure)
- SparkFun RTK Firmware GitHub Repo (contains the firmware that runs SparkFun RTK products)
Check out these additional tutorials for your perusal: