Large Digit Driver Hookup Guide
Contributors:
 Shawn Hymel
Shawn Hymel
Shawn Hymel {kind=link}
Example: Speed Trap
To demonstrate the displays we built a device that measures the distance from the wall to a human. As that distance changes we can caculate speed. We present: The SparkFun Speed Trap!
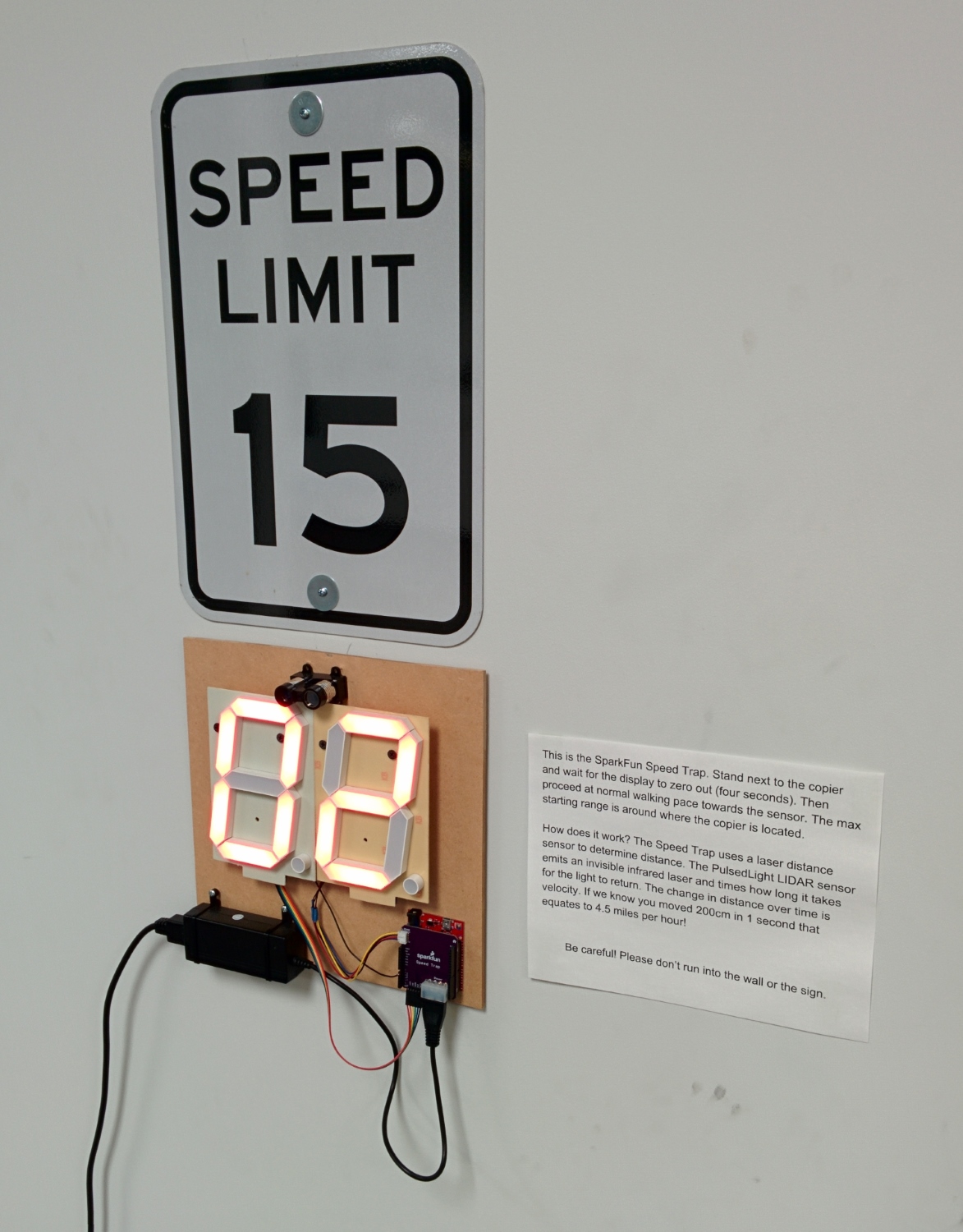
Note the handprints from people running into the wall
Here is a list of parts you'll need:
You can find the code and the PCB layout for the Speed Trap here. You don't need the custom PCB, it's fairly easy to build just with jumpers and a bit of soldering. You can also use the ATX power connector in the wishlist to save some time when using the 12V/5V power supply.
language:c
/*
Displaying instantaneous speed from a LIDAR on two large 7-segment displays
By: Nathan Seidle
SparkFun Electronics
Date: January 5th, 2015
License: This code is public domain but you buy me a beer if you use this and we meet someday (Beerware license).
The new LIDAR-Lite from PulsedLight is pretty nice. It outputs readings very quickly. From multiple distance
readings we can calculate speed (velocity is the derivative of position).
Here's how to hook up the Arduino pins to the Large Digit Driver backpack:
Arduino pin 5 -> LAT
6 -> CLK
7 -> SER
GND -> GND
5V -> 5V
VIN/Barrel Jack -> External 12V supply (this should power the LDD as well)
You'll also need to connect the LIDAR to the Arduino:
Arduino 5V -> LIDAR 5V
GND -> GND
A5 -> SCL
A4 -> SDA
A0 -> Enable
*/
#include <Wire.h> //Used for I2C
#include <avr/wdt.h> //We need watch dog for this program
#define LIDARLite_ADDRESS 0x62 // Default I2C Address of LIDAR-Lite.
#define RegisterMeasure 0x00 // Register to write to initiate ranging.
#define MeasureValue 0x04 // Value to initiate ranging.
#define RegisterHighLowB 0x8F // Register to get both High and Low bytes in 1 call.
//GPIO declarations
//-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
byte statLED = 13; //On board status LED
byte en_LIDAR = A0; //Low makes LIDAR go to sleep, high is normal operation
byte segmentLatch = 5; //Display data when this pin goes high
byte segmentClock = 6; //Clock one bit on each rising/falling edge
byte segmentSerial = 7; //Serial data in
//-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
long lastTime = 0;
long lastReading = 0;
int lastDistance = 265;
float newDistance;
const byte numberOfDeltas = 8;
float deltas[numberOfDeltas];
byte deltaSpot = 0; //Keeps track of where we are within the deltas array
//This controls how quickly the display updates
//Too quickly and it gets twitchy. Too slow and it doesn't seem like it's responding.
#define LOOPTIME 50
int maxMPH = 0; //Keeps track of what the latest fastest speed is
long maxMPH_timeout = 0; //Forget the max speed after some length of time
#define maxMPH_remember 3000 //After this number of ms the system will forget the max speed
void setup()
{
wdt_reset(); //Pet the dog
wdt_disable(); //We don't want the watchdog during init
Serial.begin(115200);
Serial.println("Speed Trap");
Wire.begin();
pinMode(en_LIDAR, OUTPUT);
pinMode(segmentClock, OUTPUT);
pinMode(segmentLatch, OUTPUT);
pinMode(segmentSerial, OUTPUT);
digitalWrite(segmentClock, LOW);
digitalWrite(segmentLatch, LOW);
digitalWrite(segmentSerial, LOW);
pinMode(statLED, OUTPUT);
Serial.println("Coming online");
enableLIDAR();
while(readLIDAR() == 0)
{
Serial.println("Failed LIDAR read");
delay(100);
}
showSpeed(42); //Test pattern
delay(500);
/*postNumber('c', false);
postNumber(' ', false);
digitalWrite(segmentLatch, LOW);
digitalWrite(segmentLatch, HIGH); //Register moves storage register on the rising edge of RCK
delay(2000);*/
wdt_reset(); //Pet the dog
wdt_enable(WDTO_250MS); //Unleash the beast
}
void loop()
{
wdt_reset(); //Pet the dog
//Each second blink the status LED
if (millis() - lastTime > 1000)
{
lastTime = millis();
if (digitalRead(statLED) == LOW)
digitalWrite(statLED, HIGH);
else
digitalWrite(statLED, LOW);
}
//Take a reading every 50ms
if (millis() - lastReading > (LOOPTIME-1)) // 49)
{
lastReading = millis();
//Every loop let's get a reading
newDistance = readLIDAR(); //Go get distance in cm
//Error checking
if(newDistance > 1200) newDistance = 0;
int deltaDistance = lastDistance - newDistance;
lastDistance = newDistance;
//Scan delta array to see if this new delta is sane or not
boolean safeDelta = true;
for(int x = 0 ; x < numberOfDeltas ; x++)
{
//We don't want to register jumps greater than 30cm in 50ms
//But if we're less than 1000cm then maybe
//30 works well
if( abs(deltaDistance - deltas[x]) > 40) safeDelta = false;
}
//Insert this new delta into the array
if(safeDelta)
{
deltas[deltaSpot++] = deltaDistance;
if (deltaSpot > numberOfDeltas) deltaSpot = 0; //Wrap this variable
}
//Get average of the current deltas array
float avgDeltas = 0.0;
for (byte x = 0 ; x < numberOfDeltas ; x++)
avgDeltas += (float)deltas[x];
avgDeltas /= numberOfDeltas;
//22.36936 comes from a big coversion from cm per 50ms to mile per hour
float instantMPH = 22.36936 * (float)avgDeltas / (float)LOOPTIME;
instantMPH = abs(instantMPH); //We want to measure as you walk away
ceil(instantMPH); //Round up to the next number. This is helpful if we're not displaying decimals.
if(instantMPH > maxMPH)
{
showSpeed(instantMPH);
maxMPH = instantMPH;
maxMPH_timeout = millis();
}
else //maxMPH is king
{
showSpeed(maxMPH);
}
if(millis() - maxMPH_timeout > maxMPH_remember)
{
maxMPH = 0;
showSpeed(0);
}
Serial.print("raw: ");
Serial.print(newDistance);
Serial.print(" delta: ");
Serial.print(deltaDistance);
Serial.print(" cm distance: ");
Serial.print(newDistance * 0.0328084, 2); //Convert to ft
Serial.print(" ft delta:");
Serial.print(abs(avgDeltas));
Serial.print(" speed:");
Serial.print(abs(instantMPH), 2);
Serial.print(" mph");
Serial.println();
}
}
//A watch dog friendly delay
void petFriendlyDelay(int timeMS)
{
long current = millis();
while(millis() - current < timeMS)
{
delay(1);
wdt_reset(); //Pet the dog
}
}
//Get a new reading from the distance sensor
int readLIDAR(void)
{
int distance = 0;
Wire.beginTransmission((int)LIDARLite_ADDRESS); // transmit to LIDAR-Lite
Wire.write((int)RegisterMeasure); // sets register pointer to (0x00)
Wire.write((int)MeasureValue); // sets register pointer to (0x00)
Wire.endTransmission(); // stop transmitting
delay(20); // Wait 20ms for transmit
wdt_reset(); //Pet the dog
Wire.beginTransmission((int)LIDARLite_ADDRESS); // transmit to LIDAR-Lite
Wire.write((int)RegisterHighLowB); // sets register pointer to (0x8f)
Wire.endTransmission(); // stop transmitting
delay(20); // Wait 20ms for transmit
wdt_reset(); //Pet the dog
Wire.requestFrom((int)LIDARLite_ADDRESS, 2); // request 2 bytes from LIDAR-Lite
if (Wire.available() >= 2) // if two bytes were received
{
distance = Wire.read(); // receive high byte (overwrites previous reading)
distance = distance << 8; // shift high byte to be high 8 bits
distance |= Wire.read(); // receive low byte as lower 8 bits
return (distance);
}
else
{
Serial.println("Read fail");
disableLIDAR();
delay(100);
enableLIDAR();
return(0);
}
}
//Takes a speed and displays 2 numbers. Displays absolute value (no negatives)
void showSpeed(float speed)
{
int number = abs(speed); //Remove negative signs and any decimals
//Serial.print("number: ");
//Serial.println(number);
for (byte x = 0 ; x < 2 ; x++)
{
int remainder = number % 10;
postNumber(remainder, false);
number /= 10;
}
//Latch the current segment data
digitalWrite(segmentLatch, LOW);
digitalWrite(segmentLatch, HIGH); //Register moves storage register on the rising edge of RCK
}
//Given a number, or '-', shifts it out to the display
void postNumber(byte number, boolean decimal)
{
// - A
// / / F/B
// - G
// / / E/C
// -. D/DP
#define a 1<<0
#define b 1<<6
#define c 1<<5
#define d 1<<4
#define e 1<<3
#define f 1<<1
#define g 1<<2
#define dp 1<<7
byte segments;
//This method uses 7946 bytes
switch (number)
{
case 1: segments = b | c; break;
case 2: segments = a | b | d | e | g; break;
case 3: segments = a | b | c | d | g; break;
case 4: segments = f | g | b | c; break;
case 5: segments = a | f | g | c | d; break;
case 6: segments = a | f | g | e | c | d; break;
case 7: segments = a | b | c; break;
case 8: segments = a | b | c | d | e | f | g; break;
case 9: segments = a | b | c | d | f | g; break;
case 0: segments = a | b | c | d | e | f; break;
case ' ': segments = 0; break;
case 'c': segments = g | e | d; break;
case '-': segments = g; break;
}
//The method uses 7954 bytes
/*if(number == 1) segments = b|c;
if(number == 2) segments = a|b|d|e|g;
if(number == 3) segments = a|b|c|d|g;
if(number == 4) segments = f|g|b|c;
if(number == 5) segments = a|f|g|c|d;
if(number == 6) segments = a|f|g|e|c|d;
if(number == 7) segments = a|b|c;
if(number == 8) segments = a|b|c|d|e|f|g;
if(number == 9) segments = a|b|c|d|f|g;
if(number == 0) segments = a|b|c|d|e|f;
if(number == ' ') segments = 0;
if(number == 'c') segments = g | e | d;
if(number == '-') segments = g;*/
if (decimal) segments |= dp;
for (byte x = 0 ; x < 8 ; x++)
{
digitalWrite(segmentClock, LOW);
digitalWrite(segmentSerial, segments & 1 << (7 - x));
digitalWrite(segmentClock, HIGH); //Data transfers to the register on the rising edge of SRCK
}
}
//Sometimes the LIDAR stops responding. This causes it to reset
void disableLIDAR()
{
digitalWrite(en_LIDAR, LOW);
}
void enableLIDAR()
{
digitalWrite(en_LIDAR, HIGH);
}
//Takes an average of readings on a given pin
//Returns the average
int averageAnalogRead(byte pinToRead)
{
byte numberOfReadings = 8;
unsigned int runningValue = 0;
for (int x = 0 ; x < numberOfReadings ; x++)
runningValue += analogRead(pinToRead);
runningValue /= numberOfReadings;
return (runningValue);
}