Actobotics Basic Differential Platform
Contributors:
 Improvised Dynamics
Improvised Dynamics
Improvised Dynamics {kind=link}
Control System Connection and Setup
If using the Redbot Mainboard, Attach the board as indicated in the previous step. Place the board with the USB facing off the end of the vehicle and the battery jack facing the motor. Attach the lead wires from the motors to the ports on the redbot board. If you are following color convention (i.e. red is positive, black is negative), wire the left motor as indicated on the silkscreen and wire the right motor counter to the silkscreen.
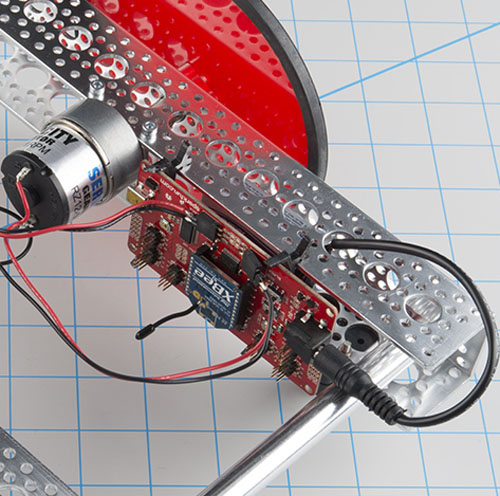
Leave the XBee off the board until after the board has been programed. Set the MOTOR switch to STOP and set the POWER switch to ON.
The control sketch uses single-letter ASCII commands to affect behavior of the vehicle. To program:
- Plug a Mini-B USB cable into the port on the board, and connect it to your computer.
- Let the FTDI populate on your computer, and open your Arduino environment. (If you need help installing FTDI drivers, visit our tutorial).
- Set the Port number to your Redbot, and set the board to Arduino Uno.
- Load the Receiver Code for Redbot sketch onto the board. If the sketch does not compile, please ensure that your Arduino Environment has the RedBot Library installed.
- Set the POWER switch to OFF, unplug the USB from the Redbot, set the MOTOR switch to RUN, set the XBee switch to HW SERIAL, plug in the XBee radio, and attach the 9V Battery.
The vehicle is now complete and ready to drive.