Using SparkFun Edge Board with Ambiq Apollo3 SDK
 Liquid Soulder
Liquid Soulder Example Applications
Having arrived here you should have all the components that you need to write an application for the Apollo3:
- Make and a Bash shell to use to build the projects.
- An ARM compiler to translate your code into machine instructions.
- The SDK that contains useful source files and other definitions.
Coming up next we will look at two example projects. The first will be a basic demonstration of some hardware capabilities like GPIO, UART, ADCs, and I2C communication and it will be pre-configured to build. The second example will be a simple "Hello World" with the main intent of explaining how to set up your own build process.
Checking Your COM Port
Before uploading code, you'll need to know what COM port that your serial-to-USB converter is connected to.
- Arduino provides a pretty convenient and cross-OS way to see all available serial ports - just use the 'Tools > Port' dialogue.
- On Unix-like operating systems you should also be able to show all available serial ports by entering the following command into the Bash shell.
- ls /dev/cu*
- On Mac, you can simply list the COM ports using the following command
- ls /dev/tty*
- On Windows (command prompt, cmd.exe) the following command will list COMX ports, but they have to have an open connection which sort of defeats the purpose in my opinion.
- mode
Example: LIS2DH12 Accelerometer UART
This example will test the accelerometer and serial UART of the Edge board as a starting point to get acquanted with the features of the SDK. The expected behavior of this example is to send accelerometer over the serial connection at 115200 baud. When you press Button 14, the loop will break and the board will turn off to conserve power.
If you've followed the rest of this tutorial then getting this example working should require only a few steps. In your Bash shell, use the cd command to navigate to $AMB_ROOT/boards_sfe/edge/examples/lis2dh12_accelerometer_uart/gcc. This is where the makefile for the gcc toolchain lives.
language:bash
cd $AMB_ROOT/boards_sfe/edge/examples/lis2dh12_accelerometer_uart/gcc
Let's make sure that there is a nice area for make to work: enter make clean at the Bash prompt.
language:bash
make clean
Then type the following command into the Bash prompt with your COM port and baud rate. In this case, our COM port enumerated to COM10. Depending on your computer, this will probably be a different number.
language:bash
make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Now to flash your code to the SparkFun Edge. The process that unfolds should take you through compiling and linking the application, then begin uploading the code.
- Hold down button 14
- Press and release reset
- Hit Enter in your Bash shell to execute the command above
- Once the code has finished uploaded, release button 14
You should see something similar to the output below. The only difference is the COM port number. If you see the words "Upload complete!", you have successfully uploaded code to the SparkFun Edge!
language:bash
$AMB_ROOT\boards_sfe\edge\examples\lis2dh12_accelerometer_uart\gcc> make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Makefile:112: warning: you have not defined PYTHON3. assuming it is accessible by 'python3'
Makefile:120: defaulting to 921600 baud for SVL
Makefile:125: warning: you have not defined SDKPATH so will continue assuming that the SDK root is at ../../../../..
Makefile:133: warning: you have not defined COMMONPATH so will continue assuming that the COMMON root is at ../../../../common
Makefile:141: warning: you have not defined BOARDPATH so will continue assuming that the BOARD root is at ../../..
Makefile:149: warning: you have not defined PROJECTPATH so will continue assuming that the PROJECT root is at ..
python3 ../../../../common/tools_sfe/ambiq/ambiq_bin2board.py --bin ../gcc/bin/lis2dh12_accelerometer_uart_asb.bin --load-address-blob 0x20000 --magic-num 0xCB -o ../gcc/bin/lis2dh12_accelerometer_uart --version 0x0 --load-address-wired 0xC000 -i 6 --options 0x1 -b 921600 -port COM10 -r 2 -v
Header Size = 0x80
original app_size 0x3ff4 ( 16372 )
load_address 0xc000 ( 49152 )
app_size 0x3ff4 ( 16372 )
w0 = 0xcb004074
Security Value 0x10
w2 = 0x10008080
addrWord = 0xc000
versionKeyWord = 0x0
child0/feature = 0xffffffff
child1 = 0xffffffff
crc = 0x5a22fb9c
Writing to file ../gcc/bin/lis2dh12_accelerometer_uart_OTA_blob.bin
testing: ../gcc/bin/lis2dh12_accelerometer_uart_OTA_blob.bin
Header Size = 0x60
app_size 0x4074 ( 16500 )
Writing to file ../gcc/bin/lis2dh12_accelerometer_uart_Wired_OTA_blob.bin
Image from 0x0 to 0x4074 will be loaded at 0x20000
Connecting over serial port COM10...
Sending Hello.
Received response for Hello
Bootloader connected
Received Status
length = 0x58
version = 0x5
Max Storage = 0x4ffa0
Status = 0x2
State = 0x7
AMInfo =
0x1
0xff2da3ff
0x55fff
0x1
0x4cd00005
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
Sending OTA Descriptor = 0xfe000
Sending Update Command.
number of updates needed = 1
Sending block of size 0x40d4 from 0x0 to 0x40d4
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 236
Sending Reset Command.
Tries = 0
Upload complete!
Once the code is uploaded, use your favorite serial terminal program to inspect the output (115200 baud).
- For Windows, the serial terminal will be such as we listed in the introduction - either via Arduino, CoolTerm, or Putty
- For Mac, you can list the serial output by using screen <device
> 115200 ie: screen /dev/tty.usbserial-DN05KQGX 115200 - Unix systems can also use the screen command as such: screen /dev/device baud-rate
Hit the reset button. You'll see the accelerometer and temperature displayed on the serial terminal.
language:bash
Whoami (should be 0x33): 0x33
Accelerometer initialization successfulAcc [mg] -541.0 x, 507.0 y, 544.0 z, Temp [deg C] 38.0,
Acc [mg] -489.0 x, 546.0 y, 562.0 z, Temp [deg C] 38.0,
Acc [mg] -786.0 x, 590.0 y, 696.0 z, Temp [deg C] 37.75,
Acc [mg] -635.0 x, 546.0 y, 628.0 z, Temp [deg C] 38.0,
Acc [mg] -551.0 x, 470.0 y, 664.0 z, Temp [deg C] 38.0,
Acc [mg] -618.0 x, 532.0 y, 710.0 z, Temp [deg C] 38.0,
Acc [mg] -552.0 x, 532.0 y, 743.0 z, Temp [deg C] 38.0,
Acc [mg] -485.0 x, 538.0 y, 675.0 z, Temp [deg C] 38.0,
Acc [mg] -418.0 x, 538.0 y, 616.0 z, Temp [deg C] 38.0,
Acc [mg] -422.0 x, 547.0 y, 652.0 z, Temp [deg C] 38.0,
Acc [mg] -434.0 x, 545.0 y, 650.0 z, Temp [deg C] 38.0,
Acc [mg] -410.0 x, 516.0 y, 640.0 z, Temp [deg C] 37.75,
Acc [mg] -459.0 x, 541.0 y, 679.0 z, Temp [deg C] 37.75,
Acc [mg] -418.0 x, 486.0 y, 601.0 z, Temp [deg C] 37.75,
Acc [mg] -374.0 x, 590.0 y, 1454.0 z, Temp [deg C] 37.75,
Acc [mg] -463.0 x, 540.0 y, 1068.0 z, Temp [deg C] 38.0,
Acc [mg] -506.0 x, 522.0 y, 884.0 z, Temp [deg C] 38.0,
Acc [mg] -546.0 x, 520.0 y, 696.0 z, Temp [deg C] 38.0,
Acc [mg] -512.0 x, 488.0 y, 689.0 z, Temp [deg C] 38.0,
Acc [mg] -512.0 x, 460.0 y, 676.0 z, Temp [deg C] 38.0,
If you are using Tera Term, it should look similar to the following image.

Try hitting Button 14 and the reset button to exit the main loop. Then press 'reset' to start it up again. When finished, disconnect the serial terminal when finished to proceed to the next example!
Example: TensorFlow Micro Speech
By default, this example is loaded on the Edge. This example will test the microphone, serial UART, and LEDs of the Edge board. The expected behavior of this example is to recognize basic speech (e.g. "Yes" and "No"). Depending on what is recognized, an associated LED will blink and an output will be displayed over the serial connection at 115200 baud.
If you've followed previous example, you'll need to adjust your directories. In your Bash shell, navigate to $AMB_ROOT/boards_sfe/edge/examples/tensorflow_micro_speech/gcc where the makefile for the gcc toolchain lives.
language:bash
cd $AMB_ROOT/boards_sfe/edge/examples/tensorflow_micro_speech/gcc
Let's make sure that there is a nice area for make to work: enter make clean at the Bash prompt.
language:bash
make clean
Then type the following command into the Bash prompt with your COM port and baud rate. In this case, our COM port enumerated to COM10. Depending on your computer, this will probably be a different number.
language:bash
make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Now to flash your code to the SparkFun Edge. The process that unfolds should take you through compiling and linking the application, then begin uploading the code.
- Hold down button 14
- Press and release reset
- Hit Enter in your Bash shell to execute the command above
- Once the code has finished uploaded, release button 14
You should see something similar to the output below. The only difference is the COM port number. If you see the words "Upload complete!", you have successfully uploaded code to the SparkFun Edge!
language:bash
$AMB_ROOT\boards_sfe\edge\examples\tensorflow_micro_speech\gcc> make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Makefile:107: warning: you have not defined PYTHON3. assuming it is accessible by 'python3'
Makefile:115: defaulting to 921600 baud for SVL
Makefile:120: warning: you have not defined SDKPATH so will continue assuming that the SDK root is at ../../../../..
Makefile:128: warning: you have not defined COMMONPATH so will continue assuming that the COMMON root is at ../../../../common
Makefile:136: warning: you have not defined BOARDPATH so will continue assuming that the BOARD root is at ../../..
Makefile:144: warning: you have not defined PROJECTPATH so will continue assuming that the PROJECT root is at ..
python3 ../../../../common/tools_sfe/ambiq/ambiq_bin2board.py --bin bin/micro_speech.bin --load-address-blob 0x20000 --magic-num 0xCB -o bin/micro_speech --version 0x0 --load-address-wired 0xC000 -i 6 --options 0x1 -b 921600 -port COM10 -r 2 -v
Header Size = 0x80
original app_size 0x185f8 ( 99832 )
load_address 0xc000 ( 49152 )
app_size 0x185f8 ( 99832 )
w0 = 0xcb018678
Security Value 0x10
w2 = 0x10008080
addrWord = 0xc000
versionKeyWord = 0x0
child0/feature = 0xffffffff
child1 = 0xffffffff
crc = 0xe92d36a7
Writing to file bin/micro_speech_OTA_blob.bin
testing: bin/micro_speech_OTA_blob.bin
Header Size = 0x60
app_size 0x18678 ( 99960 )
Writing to file bin/micro_speech_Wired_OTA_blob.bin
Image from 0x0 to 0x18678 will be loaded at 0x20000
Connecting over serial port COM10...
Sending Hello.
Received response for Hello
Bootloader connected
Received Status
length = 0x58
version = 0x5
Max Storage = 0x4ffa0
Status = 0x2
State = 0x7
AMInfo =
0x1
0xff2da3ff
0x55fff
0x11
0x4cd00005
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
Sending OTA Descriptor = 0xfe000
Sending Update Command.
number of updates needed = 1
Sending block of size 0x186d8 from 0x0 to 0x186d8
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 1896
Sending Reset Command.
Tries = 0
Upload complete!
Once the code is uploaded, use your favorite serial terminal program to inspect the output (115200 baud).
Hit the reset button. Say the word "yes" or "no". You may want to have the board within 10" away depending on how loud you say the word. Make sure to avoid excessive background noise. You'll have to try it out a few times in order for the SparkFun Edge to recognize the word depending on how you pronounce the word. We've noticed that a more percussive "yes" seems be picked up a little better, and a slightly slower, more drawn out "no" tends to be better recognized by the model.
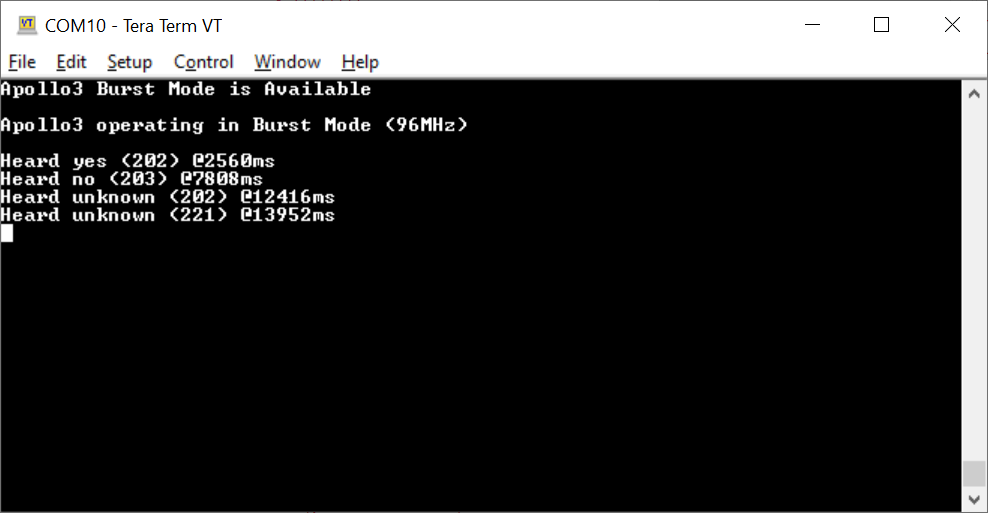
If the SparkFun Edge recognizes the word, an LED will blink and you should see an output in the serial monitor. Note that the number in the parenthesis relate to the level of confidence related to the word.
language:bash
Apollo3 Burst Mode is Available
Apollo3 operating in Burst Mode (96MHz)
Heard yes (202) @2560ms
Heard no (203) @7808ms
Heard unknown (202) @12416ms
Heard unknown (221) @13952ms
If you are using Tera Term, it should look similar to the following image.
Below is a table indicating what LED will light up depending on what is recognized.
| Detection Result | LED Color |
|---|---|
| "No" | Red |
| Unknown speech | Green |
| "Yes" | Yellow |
| No speech detected | No LEDs lit |
Example: HM01B0 Camera UART
This example will test the camera and serial UART of the Edge board. The expected behavior of this example is to send a raw image over the serial connection at 115200 baud. To view the image, you will need a Python script to convert the file to a *.bmp image.
If you've followed the previous example, you'll need to change your directory. In your Bash Shell, navigate to $AMB_ROOT/boards_sfe/edge/examples/hm01b0_camera_uart/gcc where the makefile for the gcc toolchain lives.
language:bash
cd $AMB_ROOT/boards_sfe/edge/examples/hm01b0_camera_uart/gcc
Let's make sure that there is a nice area for make to work: enter make clean at the Bash prompt.
language:bash
make clean
Then type the following command into the Bash prompt with your COM port and baud rate. In this case, our COM port enumerated to COM10. Depending on your computer, this will probably be a different number.
language:bash
make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Now to flash your code to the SparkFun Edge. The process that unfolds should take you through compiling and linking the application, then begin uploading the code.
- Hold down button 14
- Press and release reset
- Hit Enter in your Bash shell to execute the command above
- Once the code has finished uploaded, release button 14
You should see something similar to the output below. The only difference is the COM port number. If you see the words "Upload complete!", you have successfully uploaded code to the SparkFun Edge!
language:bash
$AMB_ROOT/boards_sfe\edge\examples\hm01b0_camera_uart\gcc> make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Makefile:114: warning: you have not defined PYTHON3. assuming it is accessible by 'python3'
Makefile:122: defaulting to 921600 baud for SVL
Makefile:127: warning: you have not defined SDKPATH so will continue assuming that the SDK root is at ../../../../..
Makefile:135: warning: you have not defined COMMONPATH so will continue assuming that the COMMON root is at ../../../../common
Makefile:143: warning: you have not defined BOARDPATH so will continue assuming that the BOARD root is at ../../..
Makefile:151: warning: you have not defined PROJECTPATH so will continue assuming that the PROJECT root is at ..
Compiling gcc ../../../../common/examples/hm01b0_camera_uart/main.c
Compiling gcc ../../../../common/tools_sfe/templates/startup_gcc.c
Compiling gcc ../../../../common/third_party/hm01b0/HM01B0.c
Compiling gcc ../../../../../utils/am_util_stdio.c
Compiling gcc ../../../../../utils/am_util_delay.c
Linking gcc ../gcc/bin/hm01b0_camera_uart_asb.axf with script ../../../../common/tools_sfe/templates/asb_linker.ld
Copying gcc ../gcc/bin/hm01b0_camera_uart_asb.bin...
python3 ../../../../common/tools_sfe/ambiq/ambiq_bin2board.py --bin ../gcc/bin/hm01b0_camera_uart_asb.bin --load-address-blob 0x20000 --magic-num 0xCB -o ../gcc/bin/hm01b0_camera_uart --version 0x0 --load-address-wired 0xC000 -i 6 --options 0x1 -b 921600 -port COM10 -r 2 -v
Header Size = 0x80
original app_size 0x565c ( 22108 )
load_address 0xc000 ( 49152 )
app_size 0x565c ( 22108 )
w0 = 0xcb0056dc
Security Value 0x10
w2 = 0x10008080
addrWord = 0xc000
versionKeyWord = 0x0
child0/feature = 0xffffffff
child1 = 0xffffffff
crc = 0x60cc360c
Writing to file ../gcc/bin/hm01b0_camera_uart_OTA_blob.bin
testing: ../gcc/bin/hm01b0_camera_uart_OTA_blob.bin
Header Size = 0x60
app_size 0x56dc ( 22236 )
Writing to file ../gcc/bin/hm01b0_camera_uart_Wired_OTA_blob.bin
Image from 0x0 to 0x56dc will be loaded at 0x20000
Connecting over serial port COM10...
Sending Hello.
Received response for Hello
Bootloader connected
Received Status
length = 0x58
version = 0x5
Max Storage = 0x4ffa0
Status = 0x2
State = 0x7
AMInfo =
0x1
0xff2da3ff
0x55fff
0x1
0x4cd00005
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
Sending OTA Descriptor = 0xfe000
Sending Update Command.
number of updates needed = 1
Sending block of size 0x573c from 0x0 to 0x573c
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 5972
Sending Reset Command.
Tries = 0
Upload complete!
Once the code is uploaded, use your favorite serial terminal program to inspect the output (115200 baud). Depending on your terminal window, there should be an option to record data. In this case, we'll use Tera Term's log. Click on File > Log... and save the file as a *.txt file. Feel free to name it whatever file you would like as long it has the correct extension. In this case, the file was named raw_teraterm_log.txt. The terminal window should start recording any serial data sent to the terminal window.
Hit the reset button. Give the Edge and camera a few seconds to start up. Make sure that are using the camera in a room with good lighting and hold it steady. Let the camera record a frame or two. This will take a few seconds to process and transfer over serial UART. When finished, disconnect the terminal window.
Head back to BASH window and change your working directory to the following to convert the raw image to a bmp image.
language:bash
cd $AMB_ROOT/boards_sfe/common/examples/hm01b0_camera_uart/utils
If you open the text file, you should get something similar to the output below for one frame. Depending on when stopped logging the raw image, you may have more frames.
language:bash
HM01B0 Demo
SCL: Pin 8
SDA: Pin 9
MCLK: Pin 13
VSYNC: Pin 15
HSYNC Pin 22
PCLK: Pin 23
D0: Pin 24
D1: Pin 25
D2: Pin 26
D3: Pin 27
D4: Pin 28
D5: Pin 5
D6: Pin 6
D7: Pin 7
Apollo3 Burst Mode is Available
Apollo3 operating in Normal Mode (48MHz)
Apollo3 operating in Burst Mode (96MHz)
HM01B0 Model ID 0x01B0
[hm01b0_cal_ae] +
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0xF1
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0xF1
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0xCA
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0xCA
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x90
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x90
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x60
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x60
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x4A
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
AE Calibration(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x4A
[hm01b0_cal_ae] -
HM01B0 current mode 0
AE convergance(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x4A
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
+++ frame +++
0x00000000 0A 0B 0B 0B 0B 0B 0B 0A 0B 09 0A 0B 0A 0A 0B 0A
0x00000010 0B 09 0A 0B 0A 0B 0A 0C 0B 0C 0C 0C 0C 0C 0C 0C
0x00000020 0C 0C 0D 0D 0D 0E 0C 0C 0D 0D 0C 0C 0C 0C 0B 0B
0x00000030 0B 0B 0A 0B 0B 0B 0B 0B 0A 0B 0A 0B 0C 0D 0D 0D
0x00000040 0C 0C 0C 0C 0C 0D 0D 0D 0D 0C 0C 0B 0B 0B 0C 0C
0x00000050 0A 0B 0B 0B 0B 0C 0D 0D 0D 0D 0D 0C 0C 0D 0D 0C
0x00000060 0C 0D 0E 0D 0D 0C 0C 0B 0C 0B 0C 0C 0D 0B 0C 0D
0x00000070 0C 0E 0B 0C 0C 0C 0A 0B 0B 0C 0A 0B 0C 0B 0B 0B
0x00000080 0B 0C 0A 0B 0B 0C 0B 0C 0B 0B 0C 0C 0B 0C 0C 0B
0x00000090 0C 0C 0C 0B 0C 0B 0D 0D 0D 0E 0D 0E 0E 0E 0D 0D
0x000000A0 0F 0E 0D 0E 0E 0F 0F 0E 0F 0F 0F 0F 0E 0E 0F 0E
0x000000B0 0E 0D 0E 0E 0D 0E 0D 0D 0E 0D 0F 0D 0F 11 11 12
0x000000C0 12 12 13 11 12 12 13 10 11 12 12 13 13 11 12 12
0x000000D0 12 12 14 12 12 12 12 11 12 10 12 12 11 11 11 10
0x000000E0 11 0F 0F 0F 0F 0E 0F 0E 0F 0D 0F 0D 0E 0F 0F 0E
0x000000F0 0F 0E 0F 0F 0F 0E 0F 0F 0F 10 0F 0F 0D 0E 0F 0F
0x00000100 0F 0D 0F 0F 0F 0F 10 0E 0D 0F 0F 0E 0E 0D 0C 0E
0x00000110 0D 0D 0D 0C 0D 0D 0D 0C 0D 0D 0C 0D 0C 0C 0E 0D
0x00000120 0D 0C 0D 0D 0B 0D 0C 0D 0E 0E 0D 0E 0D 0E 0E 0D
0x00000130 0E 0D 0D 0D 0D 0C 0C 0C 0D 0D 0C 0E 0E 0D 0E 0D
0x00000140 0E 0D 0C 0C 0A 0B 0B 0A 0A 0A 09 0B 0A 0A 0A 0B
0x00000150 0A 0A 0B 0A 0A 0A 0A 0B 0C 0B 0B 0C 0C 0C 0B 0C
0x00000160 0B 0B 0C 0D 0D 0C 0C 0C 0B 0D 0D 0C 0B 0C 0D 0C
0x00000170 0D 0C 0C 0A 0A 0B 0B 0A 0B 0B 0B 0B 0A 0B 0A 0C
0x00000180 0B 0C 0D 0C 0D 0C 0D 0C 0D 0B 0C 0D 0D 0C 0C 0C
0x00000190 0B 0C 0A 0C 0C 0A 0B 0B 0C 0D 0D 0C 0C 0D 0C 0D
0x000001A0 0D 0D 0C 0D 0C 0D 0E 0C 0D 0B 0D 0B 0C 0A 0A 0C
0x000001B0 0B 0B 0C 0E 0D 0C 0D 0C 0B 0B 0C 0A 0C 0B 0A 0C
0x000001C0 0C 0B 0B 0C 0B 0A 0B 0A 0B 0C 0B 0B 0C 0B 0B 0B
0x000001D0 0C 0D 0C 0C 0C 0C 0B 0B 0C 0D 0C 0D 0E 0D 0E 0F
0x000001E0 0F 0E 0E 0D 0D 10 0F 0E 0F 0F 0F 0E 0F 0F 0F 0E
0x000001F0 0E 0F 0D 0F 0F 0D 0F 0E 0E 0F 0D 0E 0E 0C 0F 0E
0x00000200 0F 11 13 11 11 12 11 12 12 12 13 13 13 13 13 12
0x00000210 12 11 13 13 11 13 11 12 12 13 11 11 11 12 11 11
0x00000220 12 12 11 11 10 10 0F 0F 0F 0E 0D 0E 0E 0E 0D 0F
0x00000230 0E 0F 10 0F 0F 0F 0E 0F 0F 0F 0F 0F 0D 0E 0F 0F
0x00000240 0E 0F 0D 0E 0F 0F 0F 0F 0F 10 0F 0E 0E 0D 0D 0D
0x00000250 0D 0E 0E 0E 0E 0D 0F 0E 0C 0E 0D 0D 0D 0E 0C 0E
0x00000260 0E 0D 0D 0E 0C 0D 0D 0D 0D 0D 0B 0D 0D 0D 0E 0E
0x00000270 0D 0D 0E 0C 0C 0D 0D 0C 0C 0D 0C 0C 0D 0D 0D 0D
0x00000280 0E 0D 0C 0D 0E 0D 0E 0E 0B 0B 0B 0B 0B 0A 0B 09
0x00000290 0B 0A 0A 0A 0A 0A 0A 0B 0B 0B 0B 0B 0B 0C 0C 0B
0x000002A0 0B 0B 0C 0C 0B 0C 0D 0C 0C 0B 0D 0B 0D 0C 0B 0D
0x000002B0 0C 0C 0D 0C 0C 0B 0B 0B 0B 0B 0B 0C 0B 0B 0C 0A
0x000002C0 0C 0B 0C 0B 0C 0D 0D 0D 0C 0D 0D 0B 0D 0D 0C 0C
0x000002D0 0B 0C 0C 0C 0B 0B 0B 0B 0C 0B 0C 0C 0C 0D 0D 0D
0x000002E0 0E 0D 0D 0D 0D 0D 0D 0C 0D 0D 0E 0E 0D 0C 0C 0D
0x000002F0 0B 0C 0B 0C 0C 0C 0E 0E 0E 0D 0D 0C 0C 0C 0C 0B
0x00000300 0B 0B 0C 0B 0B 0A 0C 0B 0C 0C 0B 0A 0C 0C 0C 0C
0x00000310 0C 0C 0C 0C 0C 0C 0C 0C 0C 0C 0D 0C 0C 0C 0C 0E
0x00000320 0E 0E 0E 0E 0C 0E 0E 0F 0E 0E 0F 0E 0E 0E 0F 0E
0x00000330 0E 0E 0F 0F 10 0E 0E 0E 0F 0F 0F 0D 0E 0F 0E 0E
0x00000340 0E 0D 0E 11 10 12 12 11 11 11 11 12 13 11 12 13
0x00000350 13 13 12 12 13 13 13 12 14 11 13 12 11 12 11 11
0x00000360 11 13 11 11 12 11 12 11 11 0F 10 0E 0E 0D 0F 0E
0x00000370 0E 0E 0F 0E 0F 0E 0F 0E 0E 0F 0E 0F 0E 0F 0F 0E
0x00000380 0E 10 0F 0D 0E 0D 0F 0F 0E 0E 0C 0E 0F 0F 0E 0E
0x00000390 0E 0E 0F 0E 0F 0F 0F 0E 0E 0D 0E 0D 0E 0D 0F 0E
0x000003A0 0D 0E 0D 0E 0E 0F 0E 0D 0E 0E 0D 0D 0E 0C 0C 0D
0x000003B0 0C 0B 0C 0C 0D 0D 0D 0D 0D 0C 0D 0D 0D 0D 0D 0D
0x000003C0 0C 0D 0D 0C 0E 0E 0D 0D 0C 0E 0E 0D 0B 0B 0B 0B
0x000003D0 0B 0A 0B 0B 0B 0A 0A 0B 0B 0B 0B 0A 0B 0B 0C 0B
0x000003E0 0B 0B 0B 0D 0D 0C 0B 0B 0C 0C 0B 0D 0D 0D 0E 0D
0x000003F0 0D 0E 0E 0D 0D 0D 0C 0C 0D 0C 0D 0C 0A 0B 0A 0B
0x00000400 0C 0A 0B 0B 0C 0C 0A 0C 0C 0D 0D 0D 0D 0D 0E 0B
0x00000410 0E 0E 0D 0D 0D 0C 0C 0C 0C 0B 0C 0C 0B 0C 0C 0C
0x00000420 0E 0D 0E 0D 0E 0E 0E 0E 0D 0D 0C 0C 0E 0E 0D 0D
0x00000430 0E 0E 0E 0E 0D 0B 0C 0D 0C 0D 0E 0D 0E 0E 0E 0D
0x00000440 0C 0C 0C 0C 0C 0C 0B 0B 0C 0B 0C 0D 0C 0B 0B 0C
0x00000450 0C 0C 0C 0C 0D 0C 0D 0C 0C 0C 0D 0D 0D 0C 0C 0D
0x00000460 0C 0C 0E 0D 0E 0E 0D 0E 0D 0F 0E 10 0F 0E 0F 0F
0x00000470 0F 0F 0F 0F 10 0E 0F 0F 10 0F 0F 0F 0F 0F 0F 0F
0x00000480 0F 0E 0E 0F 0F 0F 0E 11 13 12 12 13 12 13 13 13
0x00000490 12 13 13 11 12 12 13 13 13 15 12 14 13 13 11 13
0x000004A0 12 12 11 11 12 13 12 12 12 12 12 12 10 0F 0F 10
0x000004B0 0F 0F 0F 0E 0E 0F 0F 0E 10 0F 0E 0F 0F 11 0F 0E
0x000004C0 0E 0F 0F 0E 0E 0E 0E 0F 0F 10 0F 0F 0F 0F 0F 0F
0x000004D0 0F 0E 0F 0E 0D 0F 0E 0F 0F 0E 0E 0E 0E 0F 0F 0F
0x000004E0 0F 0F 0D 0D 0F 0D 0F 0D 0E 0F 0D 0E 0E 0E 0D 0E
0x000004F0 0E 0E 0E 0D 0C 0E 0D 0D 0B 0E 0D 0E 0E 0E 0D 0C
0x00000500 0E 0D 0D 0D 0E 0E 0D 0D 0D 0E 0E 0E 0D 0D 0E 0E
0x00000510 0B 0C 0A 0B 0B 0A 0A 0A 0A 0A 09 0B 0A 0B 0A 0B
0x00000520 0A 09 0B 0B 0B 0B 0C 0A 0C 0D 0B 0C 0C 0C 0C 0C
0x00000530 0C 0E 0D 0D 0C 0D 0E 0D 0D 0D 0D 0D 0B 0C 0C 0C
0x00000540 0A 0C 0A 0C 0B 0B 0B 0C 0C 0C 0D 0D 0D 0C 0C 0C
0x00000550 0C 0D 0D 0D 0E 0D 0C 0C 0B 0C 0C 0B 0B 0C 0C 0C
0x00000560 0C 0B 0D 0D 0D 0E 0D 0F 0D 0D 0F 0D 0D 0D 0C 0C
0x00000570 0C 0D 0D 0D 0E 0E 0E 0E 0D 0D 0C 0C 0D 0D 0D 0E
0x00000580 0D 0E 0D 0C 0C 0C 0C 0C 0C 0C 0C 0C 0C 0C 0C 0C
0x00000590 0C 0C 0C 0C 0B 0C 0B 0C 0C 0C 0C 0B 0C 0D 0D 0C
0x000005A0 0B 0D 0C 0D 0D 0D 0E 0C 0E 0E 0E 0F 0F 0E 0F 0F
0x000005B0 0F 0F 0E 0F 10 0F 0F 10 10 0F 0F 0F 10 0E 0E 10
0x000005C0 0F 0F 0F 0F 0E 0F 0E 10 0F 0F 0F 10 11 12 14 12
0x000005D0 12 13 12 13 12 11 12 12 13 12 13 12 13 13 14 13
0x000005E0 14 12 13 13 12 11 12 11 13 12 12 12 0F 12 11 10
0x000005F0 10 11 10 0F 0E 0F 0E 0F 0F 0E 0F 10 10 10 0F 0F
0x00000600 0F 10 0F 10 0F 0F 0F 0F 0F 0F 0F 11 0F 0E 0F 10
0x00000610 0F 0F 0F 0F 10 0F 10 0E 0F 0E 0E 0F 0F 0E 0F 0F
0x00000620 0F 0E 0F 0E 0F 0F 0F 0F 0E 0D 0E 0D 0F 0E 0F 0F
0x00000630 0E 0E 0E 0D 0E 0E 0E 0E 0E 0E 0D 0D 0D 0D 0D 0D
0x00000640 0D 0D 0D 0E 0D 0C 0E 0E 0E 0D 0E 0E 0E 0D 0E 0F
0x00000650 0E 0F 0E 0E 0A 0B 0B 0B 0B 0B 0B 09 0B 0B 0B 0B
0x00000660 0B 0C 0B 0B 0B 0B 0B 0A 0C 0C 0C 0C 0B 0D 0C 0C
0x00000670 0D 0C 0C 0D 0D 0E 0E 0E 0E 0E 0E 0C 0E 0D 0E 0D
0x00000680 0E 0D 0C 0B 0C 0B 0C 0D 0C 0B 0B 0B 0C 0D 0C 0D
0x00000690 0D 0D 0D 0D 0D 0D 0D 0E 0C 0D 0D 0C 0D 0C 0B 0C
0x000006A0 0C 0C 0C 0C 0D 0C 0E 0E 0D 0E 0D 0F 0D 0D 0E 0D
0x000006B0 0D 0D 0C 0D 0D 0D 0D 0E 0D 0E 0E 0E 0E 0C 0C 0C
0x000006C0 0D 0C 0E 0E 0D 0E 0E 0D 0C 0D 0C 0C 0B 0C 0C 0C
0x000006D0 0C 0D 0D 0C 0D 0C 0C 0C 0C 0C 0C 0C 0C 0B 0C 0C
0x000006E0 0C 0D 0D 0C 0C 0C 0C 0D 0B 0D 0B 0E 0D 0E 0F 0F
0x000006F0 0F 0F 0F 10 0E 10 10 0F 0F 10 0F 0F 0F 0F 0F 0F
0x00000700 10 0F 10 10 0F 0F 0F 0F 10 0F 10 10 0F 0F 11 11
0x00000710 12 13 14 14 13 13 12 13 13 13 12 13 12 12 12 12
0x00000720 13 12 12 11 13 13 14 13 13 13 13 12 12 12 11 11
0x00000730 12 11 0F 10 11 10 11 10 0F 10 0F 0F 0F 0F 0F 0F
0x00000740 0F 11 10 10 0F 0F 0F 0F 0E 0F 0F 10 10 0F 0F 0F
0x00000750 0E 0D 0F 0F 0F 0F 0F 10 0F 10 0F 0F 10 10 0F 0F
0x00000760 0F 0F 0F 0F 10 0F 0F 0F 10 0E 0F 0E 0E 0F 0F 0F
0x00000770 0F 0E 0F 0E 0F 0E 0E 0F 0F 0E 0E 0F 0E 0D 0E 0E
0x00000780 0C 0E 0E 0D 0D 0D 0D 0D 0E 0D 0D 0E 0E 0D 0D 0E
0x00000790 0E 0D 0D 0E 0E 0E 0E 0E 0B 0C 0B 0B 0A 0A 0B 0B
0x000007A0 0B 0C 0B 0C 0B 0B 0B 0C 0A 0B 0C 0B 0C 0A 0B 0C
0x000007B0 0C 0D 0C 0B 0D 0D 0D 0D 0D 0D 0C 0E 0F 0E 0E 0E
0x000007C0 0E 0E 0D 0E 0E 0D 0C 0C 0C 0C 0A 0C 0A 0C 0C 0C
0x000007D0 0C 0D 0D 0D 0C 0E 0D 0D 0D 0E 0E 0E 0D 0D 0D 0C
0x000007E0 0C 0B 0C 0D 0B 0C 0C 0D 0C 0D 0E 0E 0E 0F 0D 0E
0x000007F0 0E 0D 0E 0D 0D 0C 0D 0D 0D 0E 0D 0E 0F 0E 0F 0E
0x00000800 0D 0D 0C 0C 0D 0C 0D 0F 0E 0E 0E 0D 0E 0D 0C 0C
0x00000810 0D 0C 0C 0D 0C 0D 0D 0C 0D 0C 0C 0C 0D 0C 0C 0C
0x00000820 0C 0D 0C 0D 0D 0C 0D 0D 0D 0C 0D 0E 0C 0D 0D 0E
0x00000830 0F 0E 0F 0F 10 0F 0F 0F 0F 0F 11 10 11 11 0F 10
0x00000840 11 10 10 10 10 10 0E 10 0F 10 10 0F 0F 0F 0F 0F
0x00000850 0F 10 10 12 14 14 14 14 14 13 14 13 14 13 13 14
0x00000860 13 11 12 13 12 14 12 13 14 12 13 13 13 14 13 13
0x00000870 13 13 12 12 11 12 10 0F 0F 10 10 0F 0F 0F 0F 0F
0x00000880 0F 0F 10 10 0F 10 0F 10 10 11 10 10 0F 0E 0E 0F
0x00000890 0F 10 0F 0F 0F 10 10 0F 0F 0F 11 0F 0E 0F 0E 10
0x000008A0 0E 0F 0F 10 0F 0F 0E 0F 10 0F 0E 0F 10 0F 0E 0D
0x000008B0 0F 0E 0E 0E 0F 0F 0F 10 0F 0F 0E 0E 0E 0F 0E 0E
0x000008C0 0D 0F 0E 0F 0E 0E 0F 0D 0E 0D 0D 0E 0D 0D 0C 0D
0x000008D0 0E 0E 0E 0E 0E 0E 0D 0E 0F 0E 0E 0D 0B 0B 0B 0A
0x000008E0 0B 0B 0A 0B 0B 0A 0B 0A 0A 0B 0B 0B 0B 0B 0C 0B
0x000008F0 0B 0B 0B 0C 0C 0D 0B 0C 0D 0C 0D 0D 0D 0D 0D 0E
0x00000900 0E 0E 0E 0E 0E 0E 0D 0E 0D 0C 0C 0B 0C 0C 0C 0C
0x00000910 0B 0C 0C 0B 0D 0C 0C 0D 0E 0D 0C 0D 0D 0C 0D 0D
0x00000920 0D 0D 0C 0C 0B 0C 0C 0B 0B 0C 0C 0D 0B 0D 0D 0E
0x00000930 0D 0F 0D 0D 0E 0D 0E 0D 0C 0D 0D 0C 0D 0D 0D 0E
0x00000940 0E 0E 0D 0C 0E 0C 0C 0C 0C 0C 0C 0D 0D 0F 0E 0E
0x00000950 0E 0C 0B 0C 0C 0D 0C 0A 0C 0C 0A 0B 0C 0B 0C 0B
0x00000960 0C 0B 0B 0D 0C 0C 0C 0C 0B 0B 0B 0D 0C 0D 0B 0D
0x00000970 0C 0D 0D 0D 0D 0E 0E 0F 0E 0F 0E 0F 0F 10 0E 0E
0x00000980 0E 0F 0F 0F 10 0E 10 0F 10 0F 0D 0F 0F 0F 0F 0E
0x00000990 0F 0E 0E 11 0F 0F 10 12 14 14 13 14 13 14 12 14
0x000009A0 14 12 13 13 12 13 13 12 13 13 12 13 11 13 13 13
0x000009B0 13 13 13 13 13 12 10 11 11 11 10 10 0F 0F 0F 0E
0x000009C0 0E 0D 0E 0F 0F 0F 0F 0F 0F 10 0E 0F 10 10 0F 10
0x000009D0 0F 0F 10 0E 0F 0F 0D 0F 0F 0F 0F 0F 0F 10 0E 0F
0x000009E0 0F 0F 0E 0F 0F 0F 0E 0F 0E 0F 0D 0F 0E 0F 0E 0F
0x000009F0 0F 0F 0F 0F 0E 0E 0F 0D 0F 10 0F 0F 0E 0F 0F 0F
0x00000A00 0E 0E 0E 0E 0F 0F 0E 0E 0E 0E 0E 0E 0D 0E 0E 0D
0x00000A10 0C 0D 0D 0C 0C 0D 0D 0D 0D 0D 0D 0C 0E 0E 0D 0E
0x00000A20 0B 0B 09 0A 0A 0A 0A 0B 0B 0A 0A 0B 0B 0B 0C 0B
0x00000A30 0B 0A 0C 0B 0B 0C 0C 0B 0C 0B 0C 0C 0C 0C 0D 0D
0x00000A40 0D 0E 0D 0E 0E 0E 0D 0E 0D 0D 0D 0E 0D 0B 0C 0C
0x00000A50 0C 0B 0B 0B 0B 0C 0B 0D 0E 0D 0D 0C 0D 0C 0D 0D
0x00000A60 0D 0D 0E 0D 0D 0C 0B 0B 0C 0C 0B 0C 0B 0C 0B 0B
0x00000A70 0C 0D 0D 0E 0E 0E 0E 0E 0E 0E 0D 0D 0C 0D 0D 0D
0x00000A80 0D 0D 0E 0E 0E 0E 0D 0E 0D 0D 0C 0C 0C 0D 0C 0D
0x00000A90 0F 0E 0E 0D 0E 0D 0D 0B 0B 0C 0C 0C 0D 0A 0C 0B
0x00000AA0 0D 0D 0C 0D 0C 0C 0C 0C 0C 0C 0C 0B 0C 0D 0C 0D
0x00000AB0 0D 0D 0D 0C 0C 0D 0B 0E 0E 0E 0F 10 0F 10 10 0F
0x00000AC0 0F 0F 0F 0F 0E 11 10 0F 11 0F 10 10 0F 0F 10 10
0x00000AD0 10 0F 10 0F 0F 0F 0F 10 10 10 11 13 12 13 13 14
0x00000AE0 14 14 15 15 14 13 15 14 15 13 13 13 14 14 14 13
0x00000AF0 13 13 12 12 12 11 13 12 12 13 10 12 12 11 10 10
0x00000B00 11 0F 0F 0E 0E 0F 0F 0E 0E 0E 0F 11 0F 0F 0F 10
0x00000B10 10 0F 10 10 10 10 0F 10 0E 0E 10 0F 0F 0F 0F 10
0x00000B20 0F 0F 10 0E 0F 0F 0E 0F 0E 0E 0E 0F 0D 0F 0F 0F
0x00000B30 0F 0F 0E 0F 0F 0F 0F 0F 0E 0F 0F 0E 0F 0F 0F 0F
0x00000B40 10 0F 0F 0F 0F 0F 0D 0E 0D 0F 0D 0F 0E 0E 0E 0E
0x00000B50 0D 0E 0E 0F 0D 0E 0E 0D 0D 0D 0B 0D 0C 0D 0D 0C
0x00000B60 0D 0D 0D 0D 0B 0B 0A 0B 0B 0B 0B 0B 0A 0A 0A 0B
0x00000B70 0A 0A 0B 0B 0B 0B 0B 0C 0B 0C 0B 0B 0D 0D 0C 0D
0x00000B80 0D 0C 0C 0D 0D 0C 0D 0D 0E 0E 0D 0E 0E 0E 0E 0E
0x00000B90 0D 0D 0C 0B 0B 0B 0C 0C 0B 0C 0D 0D 0D 0E 0D 0D
0x00000BA0 0D 0D 0E 0D 0D 0D 0D 0E 0D 0C 0C 0C 0B 0C 0B 0D
0x00000BB0 0C 0D 0C 0D 0E 0D 0D 0E 0E 0E 0E 0E 0E 0E 0C 0D
0x00000BC0 0D 0D 0D 0D 0D 0D 0D 0E 0D 0E 0D 0E 0F 0D 0C 0B
0x00000BD0 0C 0D 0C 0C 0E 0D 0F 0E 0C 0D 0C 0B 0D 0C 0C 0D
0x00000BE0 0C 0B 0C 0B 0B 0B 0C 0C 0C 0C 0C 0B 0B 0C 0C 0C
0x00000BF0 0C 0D 0D 0C 0C 0D 0C 0C 0C 0E 0D 0E 0E 0F 0F 0E
0x00000C00 0F 10 10 0E 0F 0F 10 0F 0D 0F 10 11 0F 0E 0E 11
0x00000C10 10 10 0F 0F 11 10 0F 10 10 10 0F 11 0F 12 11 14
0x00000C20 13 13 14 14 16 15 15 14 15 14 14 15 14 15 14 14
0x00000C30 13 14 14 13 13 13 13 13 13 12 11 12 13 12 11 11
0x00000C40 11 11 0F 11 10 0F 0D 0F 0E 0E 0E 0E 0E 0E 0F 0F
0x00000C50 0F 0E 0F 11 0F 0F 10 0F 10 10 10 0E 0F 0F 0F 10
0x00000C60 0F 0F 0E 10 0F 0E 0F 10 0F 0D 0F 0E 0E 0F 0F 10
0x00000C70 0E 0F 0F 0F 0F 0F 10 10 0D 0F 0F 0E 10 0F 0F 0F
0x00000C80 0E 0F 10 10 10 10 0F 0F 0E 0E 0F 0F 0E 0F 0E 0F
0x00000C90 0E 0D 0F 0E 0E 0E 0C 0E 0F 0D 0E 0E 0D 0E 0E 0E
0x00000CA0 0D 0D 0D 0D 0D 0E 0D 0C 0A 0A 0A 0B 0B 0A 0B 0B
0x00000CB0 0B 0B 0B 0A 0A 0B 0B 0B 0A 0B 0C 0A 0C 0B 0C 0C
0x00000CC0 0C 0C 0C 0B 0B 0D 0D 0C 0D 0E 0E 0E 0F 0F 0E 0D
0x00000CD0 0E 0E 0E 0D 0D 0D 0C 0C 0A 0B 0C 0C 0C 0C 0C 0E
0x00000CE0 0D 0E 0D 0D 0D 0E 0D 0E 0D 0E 0B 0E 0C 0B 0B 0D
0x00000CF0 0C 0C 0C 0C 0C 0C 0D 0D 0E 0E 0E 0F 0F 0D 0E 0D
0x00000D00 0D 0E 0D 0D 0C 0D 0D 0D 0C 0C 0E 0D 0D 0E 0E 0F
0x00000D10 0F 0F 0B 0B 0C 0C 0C 0D 0E 0E 0E 0E 0D 0D 0D 0C
0x00000D20 0C 0C 0A 0C 0B 0B 0B 0C 0C 0B 0C 0C 0B 0C 0B 0C
0x00000D30 0C 0D 0B 0B 0B 0C 0D 0B 0C 0B 0D 0C 0C 0C 0D 0C
0x00000D40 0D 0E 0D 0F 0E 0E 0F 10 0F 10 0E 0F 0F 11 0E 10
0x00000D50 0F 0F 0F 10 10 11 10 10 10 0F 10 0F 0F 10 10 10
0x00000D60 10 10 12 14 15 15 16 13 15 15 14 14 13 15 14 14
0x00000D70 14 13 13 15 13 15 13 15 14 13 13 14 14 14 12 12
0x00000D80 13 13 12 11 10 0F 10 0F 0F 0F 0F 0E 0F 0F 0F 0D
0x00000D90 0F 0E 0F 0F 0F 0F 0E 0F 0F 10 10 0F 0F 10 10 11
0x00000DA0 10 0E 0F 0E 10 10 0F 0E 0F 0F 0F 0E 0E 0F 0E 0F
0x00000DB0 0F 0F 0E 0E 0F 0F 0F 0F 0F 0F 0F 0F 0F 10 0F 0F
0x00000DC0 0F 0F 0F 0F 0F 0F 0E 0E 10 0F 11 0F 0F 10 0F 0F
0x00000DD0 0F 0F 0D 0E 0E 0F 0F 0E 0E 0D 0E 0F 0E 0E 0E 0E
0x00000DE0 0E 0E 0E 0E 0D 0D 0E 0E 0E 0C 0D 0C 0B 0B 0B 0A
0x00000DF0 0B 0B 0B 0B 0B 0B 0B 0B 0B 0C 0B 0A 0B 0B 0C 0A
0x00000E00 0B 0B 0B 0C 0D 0B 0D 0C 0D 0D 0B 0C 0D 0E 0E 0E
0x00000E10 0E 0F 0E 0E 0D 0E 0D 0D 0E 0D 0D 0B 0C 0B 0D 0D
0x00000E20 0D 0D 0D 0D 0E 0D 0B 0D 0D 0E 0E 0E 0E 0C 0E 0C
0x00000E30 0B 0C 0D 0C 0D 0C 0B 0C 0C 0D 0E 0E 0E 0E 0E 0D
0x00000E40 0E 0E 0F 0E 0E 0E 0D 0D 0D 0C 0D 0C 0D 0D 0E 0E
0x00000E50 0E 0E 0E 0F 0E 0F 0D 0C 0B 0C 0D 0D 0D 0F 0F 0E
0x00000E60 0F 0E 0C 0C 0C 0C 0C 0C 0D 0C 0C 0C 0C 0C 0B 0D
0x00000E70 0C 0D 0D 0D 0C 0C 0C 0C 0C 0C 0D 0C 0D 0E 0C 0D
0x00000E80 0D 0D 0D 0E 0D 0E 0E 0F 10 0F 0E 10 0F 10 11 0F
0x00000E90 11 10 10 11 10 10 11 12 0F 10 10 11 10 11 10 10
0x00000EA0 11 11 11 0F 10 12 13 14 14 14 16 15 14 15 15 14
0x00000EB0 14 15 14 15 14 14 14 14 13 14 14 14 15 14 14 14
0x00000EC0 14 14 13 12 13 12 12 11 12 0E 0E 11 10 0E 0F 10
0x00000ED0 0E 0E 0D 0F 10 0F 0F 0E 0F 0E 0F 0F 0F 10 0F 0F
0x00000EE0 0F 10 0F 0F 0F 0F 0F 10 0E 0F 0F 0F 0F 0F 0F 0F
0x00000EF0 0F 0F 0F 0F 0F 0F 0F 0E 0E 0E 0E 0F 0F 0E 10 0F
0x00000F00 0D 0F 0F 0E 0F 0F 0F 0F 0F 10 11 10 0E 10 0E 10
0x00000F10 0E 10 10 0F 10 10 0E 0E 0F 0F 0F 0F 0E 0F 0F 0F
0x00000F20 0E 10 0E 0E 0F 10 10 0F 0E 0E 0F 0F 0F 0E 0E 0E
0x00000F30 0B 0B 0B 0B 0B 0A 0B 0B 0B 0C 0B 0B 0A 0A 0B 0B
0x00000F40 0B 0C 0C 0B 0C 0C 0B 0D 0D 0C 0B 0D 0C 0D 0E 0D
0x00000F50 0E 0D 0F 0F 0E 0F 0E 0E 0E 0D 0E 0D 0C 0E 0D 0D
0x00000F60 0C 0C 0C 0C 0D 0E 0D 0D 0E 0D 0D 0E 0D 0E 0D 0D
0x00000F70 0E 0E 0D 0D 0D 0B 0C 0D 0C 0D 0C 0C 0D 0E 0E 0F
0x00000F80 0E 0F 0E 0E 0F 0D 0E 0E 0E 0C 0D 0D 0E 0D 0B 0C
0x00000F90 0C 0B 0B 0D 0F 0E 0E 0F 0F 0F 0E 0D 0D 0D 0D 0D
0x00000FA0 0C 0F 0D 0F 0E 0D 0D 0D 0D 0D 0D 0D 0B 0B 0C 0B
0x00000FB0 0B 0C 0C 0D 0C 0C 0D 0D 0D 0C 0D 0D 0C 0D 0C 0C
0x00000FC0 0C 0D 0D 0D 0D 0E 0D 0E 0D 0E 0F 0E 10 0E 11 10
0x00000FD0 10 11 11 10 0F 10 0E 10 10 11 10 11 11 0F 11 0F
0x00000FE0 10 11 0F 0F 10 11 10 12 0F 12 14 16 13 15 13 14
0x00000FF0 15 16 14 14 13 14 15 15 14 15 14 15 15 15 14 15
0x00001000 14 14 13 15 14 13 15 14 13 13 12 12 10 0F 11 0F
0x00001010 0E 10 0F 0D 0E 0E 0E 0F 0F 10 0F 0F 0F 0F 0F 0F
0x00001020 0F 0E 0F 10 0F 0F 0F 0F 0F 0E 10 10 10 0F 10 10
0x00001030 10 10 10 0F 10 0E 0F 0F 0E 0D 0F 0E 0E 0E 0D 10
0x00001040 10 0F 0E 0F 10 0F 0F 0E 0F 0F 0F 10 10 0F 0F 0E
0x00001050 10 10 11 0F 10 10 10 0F 11 0F 0E 0F 0F 10 0E 0E
0x00001060 0E 0F 0E 0F 0F 0F 0F 0F 10 0F 0F 0E 10 10 10 0E
0x00001070 0F 0F 0D 0F 0A 0B 0A 0B 0B 0B 0B 0B 0B 0B 0B 0A
0x00001080 0C 0B 0B 0B 0B 0C 0B 0C 0B 0C 0D 0C 0D 0B 0D 0C
0x00001090 0D 0D 0D 0E 0E 0F 0F 0E 0F 0F 0E 0E 0F 0D 0E 0D
0x000010A0 0E 0D 0E 0C 0C 0C 0D 0D 0C 0C 0E 0D 0D 0D 0E 0D
0x000010B0 0D 0C 0E 0D 0C 0D 0E 0D 0C 0D 0C 0C 0C 0E 0C 0D
0x000010C0 0D 0E 0E 0D 0D 0F 0E 0D 0E 0F 0E 0E 0D 0D 0D 0D
0x000010D0 0C 0D 0C 0D 0C 0D 0C 0D 0E 0E 0F 0F 0E 0F 0E 0D
0x000010E0 0C 0D 0C 0D 0E 0E 0F 0F 0D 0E 0D 0D 0D 0D 0B 0C
0x000010F0 0B 0C 0D 0C 0C 0B 0C 0D 0D 0C 0C 0D 0B 0C 0C 0D
0x00001100 0C 0C 0C 0D 0D 0D 0D 0D 0D 0D 0D 0D 0D 0E 10 0F
0x00001110 0E 0F 10 0F 0F 10 11 10 11 10 10 10 11 10 0F 11
0x00001120 10 10 11 10 11 10 12 10 11 11 11 10 12 12 15 14
0x00001130 16 15 15 15 15 15 15 13 14 14 16 15 15 15 14 14
0x00001140 16 15 14 14 15 14 14 14 16 15 14 14 14 15 14 12
0x00001150 10 11 11 10 10 0E 0F 0E 0E 0E 0F 0E 10 0E 10 0F
0x00001160 0F 10 0F 10 0F 0F 0F 0F 0F 0F 0E 0F 0F 10 10 10
0x00001170 11 10 0F 10 11 10 11 10 10 0F 10 0F 0F 0F 0F 0F
0x00001180 0F 0F 0E 0F 0E 11 0E 10 10 10 10 0F 11 10 0F 10
0x00001190 0F 0F 10 10 11 10 10 10 10 11 0E 10 10 0F 11 10
0x000011A0 10 10 10 10 0F 0F 0F 0E 0E 10 0E 0F 0E 10 10 10
0x000011B0 11 0F 0F 0E 0F 0F 10 0E 0B 0A 0B 0B 0B 0B 0B 0B
0x000011C0 0B 0B 0A 0A 0B 0C 0C 0C 0C 0B 0C 0A 0C 0C 0C 0C
0x000011D0 0C 0C 0D 0D 0C 0C 0D 0D 0E 0D 0E 0E 0F 0E 0F 0F
0x000011E0 0E 0E 0D 0F 0D 0D 0D 0C 0D 0B 0D 0D 0D 0D 0D 0E
0x000011F0 0D 0E 0D 0E 0F 0E 0E 0E 0C 0E 0C 0C 0D 0D 0D 0C
0x00001200 0C 0D 0C 0D 0D 0E 0E 0E 0F 0F 0F 0E 0E 0E 0F 0D
0x00001210 0C 0D 0C 0D 0C 0D 0C 0C 0D 0D 0E 0D 0E 0F 0F 0E
0x00001220 0F 0F 0E 0E 0D 0D 0D 0D 0E 0E 0F 0E 10 0E 0E 0D
0x00001230 0C 0C 0D 0B 0D 0D 0C 0C 0C 0B 0C 0C 0C 0C 0C 0E
0x00001240 0C 0C 0B 0C 0C 0C 0D 0C 0D 0D 0D 0C 0D 0E 0D 0D
0x00001250 0E 0E 0E 0E 0E 0F 10 10 10 10 0F 10 11 10 12 11
0x00001260 10 11 0F 10 12 10 11 11 11 11 10 11 0F 10 10 11
0x00001270 12 13 15 16 14 15 16 16 14 15 16 14 15 15 14 15
0x00001280 16 14 16 14 15 16 14 14 14 14 15 16 15 15 15 13
0x00001290 16 14 13 11 10 12 10 11 10 0F 0F 0E 0E 0D 0E 0D
0x000012A0 0E 0F 0E 0D 0F 0F 0E 0F 0E 0F 0E 0F 10 0F 0F 10
0x000012B0 0F 10 0F 0F 0E 10 10 10 11 10 11 11 10 10 0F 0F
0x000012C0 0E 0F 0F 0E 0F 0F 0F 0F 10 0F 0F 0E 11 0F 0F 0F
0x000012D0 0F 0F 10 0F 0E 0F 10 10 11 10 10 11 11 11 11 11
0x000012E0 0F 0F 10 10 11 10 0F 0F 0F 0F 0F 0F 0F 0F 0F 0E
0x000012F0 10 10 0F 0E 10 10 11 10 0F 10 10 0F 0B 0B 0B 0B
0x00001300 0B 0B 0B 0B 0B 0B 0B 0B 0C 0C 0C 0C 0B 0C 0B 0C
0x00001310 0B 0B 0C 0D 0C 0D 0D 0D 0D 0D 0E 0E 0E 0D 0E 0E
0x00001320 0F 10 0E 0E 10 0E 0F 0F 0E 0D 0C 0D 0B 0D 0C 0D
0x00001330 0E 0D 0E 0E 0E 0D 0F 0D 0E 0E 0D 0E 0E 0C 0B 0D
0x00001340 0C 0E 0D 0D 0D 0C 0D 0E 0E 0E 0F 0E 0F 0D 10 0F
0x00001350 0E 0E 0E 0D 0C 0D 0D 0C 0D 0D 0D 0D 0D 0C 0C 0D
0x00001360 0D 0F 0F 0E 0F 10 0F 0E 0E 0C 0C 0D 0D 0E 0F 0E
0x00001370 0F 0F 0E 0C 0D 0C 0D 0C 0C 0C 0D 0C 0C 0C 0D 0C
0x00001380 0C 0C 0D 0D 0D 0E 0B 0D 0C 0D 0D 0D 0C 0C 0C 0D
0x00001390 0C 0D 0C 0C 0E 0F 0E 10 0F 0F 10 0F 10 0F 10 10
0x000013A0 10 10 10 12 10 10 12 10 10 11 11 11 12 12 10 11
0x000013B0 11 12 12 12 13 14 16 17 16 15 16 16 17 16 15 14
0x000013C0 15 14 16 15 15 16 14 15 14 15 15 15 14 14 15 14
0x000013D0 14 16 15 14 15 14 12 11 11 12 11 11 10 10 10 10
0x000013E0 0F 0E 0D 0F 0E 0F 0F 0F 0D 0E 0F 10 0F 10 0F 0F
0x000013F0 10 0F 0D 0F 0F 0F 11 0E 10 10 0E 11 10 11 10 10
0x00001400 0F 11 11 0F 0F 0F 0F 0F 0F 0E 0E 10 10 0F 0F 11
0x00001410 0D 0F 0E 0F 10 0F 0F 0E 0E 10 0F 10 0E 10 11 10
0x00001420 11 10 10 11 10 11 11 10 0F 0F 0F 10 0F 10 0F 10
0x00001430 0F 0F 0F 0F 0F 0F 10 11 10 10 0F 10 11 0F 11 0F
0x00001440 0B 0B 0B 0C 0B 0B 0B 0C 0B 0B 0B 0B 0A 0C 0B 0C
0x00001450 0C 0C 0C 0C 0C 0D 0C 0C 0E 0D 0C 0C 0D 0C 0E 0E
0x00001460 0D 0D 0F 0E 0F 0F 0F 10 0D 0F 0E 0D 0C 0E 0D 0D
0x00001470 0D 0C 0C 0E 0E 0C 0E 0D 0D 0E 0E 0C 0E 0E 0E 0D
0x00001480 0D 0D 0D 0C 0C 0C 0C 0C 0C 0D 0C 0D 0E 0E 0F 0F
0x00001490 0F 10 0F 0D 0F 0E 0C 0D 0C 0D 0C 0D 0C 0E 0C 0D
0x000014A0 0C 0D 0C 0D 0D 0E 0F 0F 0F 0F 0E 0F 0D 0D 0D 0C
0x000014B0 0C 0D 0E 0E 0F 0E 0D 0D 0D 0E 0D 0B 0D 0D 0D 0D
0x000014C0 0D 0C 0E 0D 0D 0C 0C 0C 0D 0C 0C 0D 0D 0D 0C 0D
0x000014D0 0D 0C 0C 0C 0D 0D 0C 0D 0E 0D 0E 0E 0E 0E 0E 0F
0x000014E0 10 10 0F 0F 11 12 11 11 11 11 11 11 12 11 10 11
0x000014F0 11 11 13 10 11 11 12 12 11 14 15 15 16 15 16 17
0x00001500 14 16 16 15 15 16 17 16 16 16 15 16 14 16 14 16
0x00001510 16 15 16 15 16 13 14 14 16 14 14 12 11 12 12 11
0x00001520 10 12 10 0F 0F 0F 0F 0E 0E 0E 0E 0F 0E 0D 0E 0F
0x00001530 10 10 0E 0F 0F 0F 0E 0F 0F 0E 0F 0F 0E 0F 0F 0F
0x00001540 10 11 10 11 11 10 11 0F 0F 0F 0F 0E 10 0F 0F 0F
0x00001550 10 0F 10 0F 0F 0F 0F 0F 0F 0F 10 0F 0F 0F 0F 0E
0x00001560 11 11 10 11 11 11 11 11 11 12 10 12 11 11 10 11
0x00001570 11 11 10 0F 0F 10 10 0E 10 11 11 11 10 11 11 11
0x00001580 10 11 11 11 0B 0B 0B 0B 0C 0C 0B 0B 0C 0B 0C 0C
0x00001590 0B 0D 0C 0B 0C 0C 0C 0C 0C 0C 0C 0C 0E 0D 0C 0D
0x000015A0 0D 0D 0E 0D 0E 0E 0E 0E 0E 10 10 0F 0F 0F 0F 0E
0x000015B0 0E 0E 0D 0C 0D 0C 0E 0E 0E 0E 0D 0E 0E 0E 0F 0E
0x000015C0 0F 0E 0D 0E 0D 0D 0C 0D 0C 0D 0D 0C 0C 0D 0E 0E
0x000015D0 0E 0F 10 0E 0F 10 10 0F 0D 0F 0D 0E 0E 0E 0D 0D
0x000015E0 0E 0D 0E 0D 0D 0D 0D 0C 0D 0D 0E 0F 10 10 0F 0E
0x000015F0 0F 0D 0D 0D 0D 0D 0F 0F 0F 10 0F 0D 0C 0D 0D 0E
0x00001600 0C 0C 0D 0D 0D 0D 0D 0D 0D 0C 0C 0D 0D 0D 0C 0D
0x00001610 0D 0D 0D 0D 0E 0D 0D 0D 0D 0D 0D 0D 0E 0E 0E 0F
0x00001620 0E 0F 0F 0F 10 12 10 11 11 11 11 10 11 12 12 11
0x00001630 11 11 11 12 11 12 12 11 12 12 11 12 13 15 15 17
0x00001640 16 16 15 17 15 17 15 16 16 17 16 16 16 16 16 15
0x00001650 15 16 16 16 15 15 16 15 15 15 15 15 15 14 13 12
0x00001660 13 11 12 12 11 11 11 11 10 11 10 0F 0E 0F 10 0F
0x00001670 0F 0F 0F 0F 0F 0F 0E 0E 0F 10 0E 0E 0F 0F 0F 0F
0x00001680 0F 10 10 0E 0F 10 10 10 10 10 11 11 10 10 10 12
0x00001690 0F 10 0F 10 10 0F 0F 0F 0F 0F 0F 11 0F 10 0F 0F
0x000016A0 0F 0F 0F 10 10 0E 0F 11 10 10 11 10 11 11 11 12
0x000016B0 11 11 11 12 12 10 10 11 11 11 11 10 0F 0F 11 12
0x000016C0 11 11 11 10 11 11 10 10 0B 0B 0A 0A 0B 0C 0B 0B
0x000016D0 0C 0B 0B 0B 0B 0C 0C 0C 0B 0C 0B 0C 0B 0C 0D 0D
0x000016E0 0C 0D 0C 0D 0D 0D 0D 0E 0E 0F 0E 0E 0F 0F 0F 0F
0x000016F0 11 0F 0E 0E 0D 0E 0E 0E 0D 0C 0D 0D 0D 0D 0D 0E
0x00001700 0E 0E 0D 0F 0E 0E 0E 0C 0C 0C 0D 0C 0C 0C 0C 0C
0x00001710 0D 0D 0D 0E 0F 0F 0F 0F 10 0F 0F 10 0E 0D 0D 0B
0x00001720 0D 0C 0E 0D 0D 0E 0E 0D 0C 0D 0C 0C 0C 0D 0E 0E
0x00001730 0E 0F 0F 0E 0E 0D 0C 0C 0D 0D 0D 0E 0F 0E 0F 0E
0x00001740 0D 0C 0D 0D 0D 0C 0C 0C 0D 0D 0E 0C 0C 0C 0C 0E
0x00001750 0D 0D 0B 0C 0D 0C 0D 0D 0C 0D 0D 0D 0D 0C 0D 0C
0x00001760 0D 0D 0C 0E 0E 0E 0F 0F 10 0F 0F 10 10 10 10 11
0x00001770 11 10 11 11 11 10 11 11 10 10 12 11 12 12 12 12
0x00001780 13 14 15 16 16 16 16 16 15 17 17 16 15 16 16 16
0x00001790 15 16 14 15 16 14 16 15 16 16 14 15 15 15 16 16
0x000017A0 15 13 12 12 12 12 12 11 11 11 10 10 0F 0F 11 10
0x000017B0 10 11 10 0F 10 0E 0E 0F 0F 0F 0E 0E 0E 0F 0F 0D
0x000017C0 0E 0F 0F 0E 0E 0F 0F 0E 0F 0F 0F 0F 0F 11 0F 10
0x000017D0 10 0F 0F 0E 0F 0F 0F 10 10 10 10 0F 0F 0F 0F 0F
0x000017E0 0F 0E 0F 0E 0E 0F 10 0F 0F 10 10 10 11 10 11 0F
0x000017F0 0F 10 10 10 11 10 11 10 11 10 10 11 10 0E 0F 10
0x00001800 10 10 11 11 10 11 11 0F 0F 11 11 10 0B 0B 0A 0A
0x00001810 09 0B 0A 0A 0A 0A 0B 0B 0B 0C 0B 0B 0B 0B 0B 0C
0x00001820 0B 0B 0B 0C 0E 0C 0C 0C 0C 0D 0D 0E 0E 0E 0E 0E
0x00001830 0F 10 0F 0F 0F 0E 0E 0D 0F 0E 0E 0D 0D 0D 0D 0D
0x00001840 0E 0D 0D 0E 0D 0E 0E 0E 0C 0E 0D 0D 0D 0D 0D 0D
0x00001850 0D 0D 0C 0D 0D 0C 0E 10 0E 0E 0F 0E 0F 0F 0F 0F
0x00001860 0E 0D 0D 0D 0D 0D 0D 0D 0E 0F 0E 0D 0D 0D 0D 0D
0x00001870 0D 0D 0F 0E 10 10 0E 0F 0F 0E 0E 0D 0D 0E 0E 0E
0x00001880 0F 0F 10 0E 0D 0C 0D 0C 0B 0B 0C 0C 0D 0C 0C 0C
0x00001890 0C 0C 0C 0C 0D 0C 0D 0C 0D 0D 0C 0D 0B 0D 0D 0D
0x000018A0 0D 0C 0D 0C 0D 0D 0D 0D 0D 0E 0E 0E 0E 0F 0F 0F
0x000018B0 10 10 10 10 10 0E 10 11 11 12 10 11 11 11 11 12
0x000018C0 12 13 12 12 14 17 17 16 16 15 16 17 16 17 14 16
0x000018D0 15 15 16 15 15 15 16 15 15 17 15 16 16 15 15 15
0x000018E0 15 15 13 14 14 13 12 11 12 12 12 11 11 11 11 0F
0x000018F0 11 10 12 10 11 10 10 10 11 0F 0E 0E 0F 0F 0E 0E
0x00001900 0E 0E 0F 0E 0F 0E 0E 0F 0E 0F 0E 0E 0F 0F 0F 0F
0x00001910 0E 0E 0F 0E 0F 0F 0F 11 0F 0F 0E 0F 0F 11 0F 0F
0x00001920 10 11 10 0F 0F 0F 0F 10 0E 0E 0F 0F 0F 10 10 10
0x00001930 11 10 11 11 11 11 12 11 10 11 12 12 11 11 11 11
0x00001940 11 10 10 10 11 11 11 11 11 11 12 11 11 10 11 10
0x00001950 0B 0B 0A 0B 0C 0C 0B 0B 0B 0C 0B 0B 0C 0B 0C 0C
0x00001960 0C 0B 0C 0B 0C 0C 0D 0C 0D 0C 0D 0D 0D 0D 0D 0E
0x00001970 0D 0E 0F 0D 0F 10 0F 0F 0F 0E 0F 10 0E 0E 0D 0D
0x00001980 0D 0D 0E 0E 0D 0D 0E 0E 0E 0E 0D 0E 0D 0D 0D 0C
0x00001990 0D 0D 0D 0D 0D 0C 0D 0D 0D 0D 0D 0F 0E 0D 0F 0F
0x000019A0 0F 0F 0D 0E 0D 0D 0C 0D 0C 0D 0D 0E 0D 10 11 0E
0x000019B0 0B 0D 0D 0D 0C 0D 0E 0F 0F 11 0F 11 0E 0E 0C 0D
0x000019C0 0D 0D 0E 0F 0F 0F 0E 0E 0D 0C 0D 0D 0D 0C 0C 0D
0x000019D0 0C 0B 0B 0D 0C 0D 0D 0D 0D 0E 0C 0C 0D 0C 0D 0C
0x000019E0 0C 0C 0C 0B 0C 0E 0E 0D 0C 0D 0E 0E 0D 0D 0E 0F
0x000019F0 0E 0F 0E 0E 0E 10 0F 10 0F 11 0E 10 10 11 11 11
0x00001A00 11 11 11 12 12 11 11 12 15 16 16 17 17 17 17 16
0x00001A10 15 16 17 16 16 16 16 17 15 15 16 15 16 16 17 15
0x00001A20 15 15 14 16 15 15 15 15 14 13 11 11 11 11 12 10
0x00001A30 11 12 10 0F 11 11 0F 10 11 12 11 10 10 10 10 0E
0x00001A40 0F 0E 0F 0F 0E 0C 0C 0E 0D 0D 0E 0F 0E 0D 0D 0E
0x00001A50 0E 0F 0F 0E 0D 0F 0F 0E 0F 0F 0E 0F 0E 0F 0F 10
0x00001A60 10 10 10 10 10 11 10 0F 10 0F 0F 0F 0E 0F 0F 0E
0x00001A70 0E 0F 10 0F 10 10 10 11 11 10 11 12 12 12 12 11
0x00001A80 11 12 0F 11 10 11 10 10 10 12 10 11 11 12 12 11
0x00001A90 11 11 11 11 0B 0B 0B 0B 0B 0B 0B 0B 0B 0C 0C 0C
0x00001AA0 0B 0A 0B 0B 0B 0C 0C 0B 0C 0C 0B 0C 0D 0D 0C 0D
0x00001AB0 0D 0E 0D 0E 0F 0F 0F 0F 10 0F 11 11 10 0F 10 0D
0x00001AC0 0D 0E 0D 0E 0D 0E 0E 0E 0E 0D 0E 0E 0F 0E 0E 0E
0x00001AD0 0D 0D 0C 0C 0C 0D 0B 0D 0C 0B 0C 0D 0E 0F 0E 0E
0x00001AE0 0E 0F 0F 0F 0E 0F 0E 0D 0D 0D 0D 0D 0C 0C 0D 0D
0x00001AF0 0E 0F 0F 0F 0E 0D 0B 0D 0C 0C 0D 0D 0F 10 10 0F
0x00001B00 10 0F 0E 0D 0D 0D 0D 0F 0E 0F 10 0E 0E 0E 0D 0D
0x00001B10 0D 0B 0E 0C 0D 0D 0D 0C 0D 0C 0C 0D 0D 0E 0C 0C
0x00001B20 0C 0C 0C 0C 0C 0C 0D 0D 0D 0D 0D 0D 0D 0D 0C 0F
0x00001B30 0E 0E 0E 0D 0E 0F 0F 10 0F 0E 0F 0F 0F 10 0F 11
0x00001B40 11 12 11 12 10 10 11 11 12 12 12 13 16 17 16 17
0x00001B50 17 16 17 17 17 17 16 15 17 17 16 16 16 15 15 16
0x00001B60 15 17 17 15 16 15 15 16 15 15 15 14 14 12 12 11
0x00001B70 12 11 11 11 10 10 11 10 11 11 11 11 12 11 11 11
0x00001B80 11 0F 10 11 10 0E 10 0E 0E 0F 0E 0D 0E 0C 0D 0E
0x00001B90 0E 0E 0E 0D 0F 0E 10 0E 0F 0E 0F 0E 0F 0E 0F 0E
0x00001BA0 10 0F 11 0F 11 0F 12 10 10 10 0F 0F 10 0F 0F 0E
0x00001BB0 0F 0F 0F 0F 0F 0E 10 0F 11 10 0F 10 10 10 11 10
0x00001BC0 11 12 12 11 11 12 11 12 12 12 11 12 11 10 11 10
0x00001BD0 11 12 13 11 11 11 12 11 0B 0B 0B 0A 0B 0B 0B 0B
0x00001BE0 0C 0A 0C 0C 0C 0A 0C 0C 0B 0C 0C 0D 0C 0B 0C 0C
0x00001BF0 0D 0D 0D 0D 0D 0E 0E 0C 0F 0E 10 0E 10 11 10 10
0x00001C00 11 0F 10 0F 0E 0D 0E 0E 0D 0E 0E 0D 0E 0E 0E 0E
0x00001C10 0E 0E 0E 0E 0D 0D 0C 0C 0C 0C 0C 0D 0D 0B 0C 0D
0x00001C20 0E 0F 0E 0E 0F 0F 10 10 10 0F 0E 0E 0D 0C 0D 0C
0x00001C30 0E 0D 0D 0E 0F 0F 0F 0F 0F 0E 0D 0E 0D 0D 0D 0E
0x00001C40 10 10 10 11 0F 0F 0E 0E 0D 0C 0E 0E 0F 0E 0F 0F
0x00001C50 0F 0D 0E 0C 0D 0B 0D 0E 0C 0C 0C 0D 0B 0D 0C 0C
0x00001C60 0D 0D 0D 0D 0D 0B 0C 0D 0D 0B 0D 0C 0B 0D 0C 0D
0x00001C70 0D 0D 0E 0E 0E 0E 0E 0F 0D 0E 0F 0E 0E 10 0F 10
0x00001C80 0F 0F 0F 10 0F 10 10 10 10 11 11 11 12 11 12 14
0x00001C90 15 17 16 16 16 16 17 17 17 17 16 18 16 15 17 17
0x00001CA0 14 15 16 14 15 14 16 16 16 15 15 15 16 15 15 14
0x00001CB0 13 11 12 12 11 11 12 12 0F 11 11 10 11 12 10 10
0x00001CC0 11 10 11 11 11 11 11 11 10 10 10 0F 0D 0E 0F 0E
0x00001CD0 0D 0E 0C 0D 0E 0E 0E 0D 0E 0D 0F 0E 0F 0E 0F 0F
0x00001CE0 0E 0E 0E 0F 0F 0F 0F 10 10 11 10 10 11 10 0F 10
0x00001CF0 11 0F 0F 10 0E 0F 0E 10 0F 0F 0F 0F 11 10 10 10
0x00001D00 10 0F 10 0F 10 10 11 10 11 11 10 11 11 10 12 11
0x00001D10 10 12 11 12 12 11 11 11 10 12 10 12 0A 0C 0B 0B
0x00001D20 0B 0B 0B 0C 0B 0B 0B 0A 0C 0B 0C 0B 0A 0C 0C 0C
0x00001D30 0D 0C 0D 0D 0B 0D 0D 0C 0D 0D 0E 0E 0D 0E 0E 0E
0x00001D40 0F 12 10 11 11 10 0E 0F 0E 0E 0E 0D 0E 0D 0D 0E
0x00001D50 0E 0D 0E 0D 0E 0E 0F 0E 0D 0C 0B 0D 0C 0C 0B 0D
0x00001D60 0D 0D 0C 0E 0E 0E 0F 0F 0F 0F 10 0F 0F 0F 0E 0E
0x00001D70 0D 0D 0D 0D 0E 0D 0C 0E 0E 10 10 0F 0E 0D 0D 0D
0x00001D80 0D 0D 0E 0E 10 10 0F 10 10 10 0D 0D 0D 0C 0C 0E
0x00001D90 0F 10 10 0F 0E 0E 0E 0D 0D 0C 0D 0D 0D 0C 0D 0D
0x00001DA0 0C 0C 0B 0C 0D 0E 0C 0C 0C 0C 0D 0B 0D 0C 0D 0E
0x00001DB0 0D 0E 0C 0D 0D 0D 0D 0E 0E 0E 0E 0E 0E 0D 0F 0E
0x00001DC0 0F 0E 10 0E 0F 0F 0F 0F 10 0F 0F 10 10 0F 10 0F
0x00001DD0 11 11 12 14 16 17 16 15 16 17 17 17 18 17 17 17
0x00001DE0 17 17 16 16 16 17 16 16 16 16 17 15 16 16 15 15
0x00001DF0 16 15 15 15 13 13 10 11 12 12 11 11 10 11 10 13
0x00001E00 11 12 12 12 12 11 10 11 12 11 12 11 0F 10 10 10
0x00001E10 10 0E 0E 0F 0E 0C 0D 0E 0D 0D 0D 0D 0E 0E 0D 0F
0x00001E20 0F 0E 0F 0E 0D 0F 0D 0E 0D 10 0F 10 0F 10 11 11
0x00001E30 10 11 10 11 0F 10 0F 10 11 10 10 0F 0F 0F 0F 0E
0x00001E40 10 0F 0F 0E 0F 0F 10 10 0F 10 11 11 10 11 0F 0F
0x00001E50 11 12 12 13 10 12 12 11 12 11 11 11 11 12 11 12
0x00001E60 0B 0C 0C 0A 0B 0A 0B 0B 0B 0C 0B 0B 0C 0A 0B 0B
0x00001E70 0B 0C 0B 0C 0C 0C 0C 0B 0C 0C 0D 0D 0D 0E 0E 0E
0x00001E80 0E 0D 0F 10 10 0F 0F 10 10 0E 0F 0D 0E 0E 0D 0D
0x00001E90 0E 0C 0D 0D 0D 0D 0E 0D 0F 0E 0D 0D 0C 0D 0D 0D
0x00001EA0 0D 0C 0C 0C 0C 0E 0E 0F 0E 0D 0E 0F 0F 0F 0F 10
0x00001EB0 10 0D 0E 0D 0D 0E 0D 0E 0E 0E 0F 10 0F 10 11 0F
0x00001EC0 0F 0E 0E 0D 0D 0D 0D 0E 10 0F 10 10 10 0F 0F 0F
0x00001ED0 0E 0C 0C 0D 0F 0F 0E 0F 0F 0E 0D 0D 0D 0C 0C 0D
0x00001EE0 0D 0C 0D 0D 0C 0C 0D 0D 0D 0D 0D 0C 0B 0C 0C 0D
0x00001EF0 0D 0D 0C 0D 0C 0D 0D 0C 0D 0D 0C 0E 0C 0E 0D 0E
0x00001F00 0D 0E 0E 0E 0F 0E 0E 0F 0E 10 10 0F 0F 0F 10 11
0x00001F10 0F 0E 10 0F 10 10 13 14 15 16 15 17 15 17 17 15
0x00001F20 17 17 16 16 17 16 16 17 15 16 15 17 15 17 16 14
0x00001F30 16 15 15 15 15 17 14 16 13 12 10 12 12 12 11 11
0x00001F40 11 10 11 11 11 11 12 12 11 11 12 0F 12 10 11 11
0x00001F50 10 10 11 10 10 10 0F 0F 0E 0E 0E 0D 0D 0D 0D 0D
0x00001F60 0D 0E 0E 0D 0E 0E 0F 0F 10 0E 0E 0F 0F 0F 0F 0F
0x00001F70 0F 0F 10 0F 10 11 10 10 11 0F 10 10 10 11 0F 10
0x00001F80 10 10 10 11 11 10 11 11 10 0F 0F 10 0F 11 0F 11
0x00001F90 10 11 10 11 12 11 12 11 12 13 12 11 12 12 11 13
0x00001FA0 11 11 11 11 0C 0B 0C 0B 0C 0C 0C 0B 0C 0B 0C 0B
0x00001FB0 0C 0C 0C 0B 0C 0D 0B 0D 0C 0E 0D 0D 0D 0E 0E 0E
0x00001FC0 0E 0D 0E 0F 0E 0E 10 10 0F 12 11 10 11 10 0F 0F
0x00001FD0 0F 0E 0F 0E 0E 0F 0E 0D 0D 0E 10 0F 0D 0F 0F 0D
0x00001FE0 0E 0D 0C 0C 0C 0E 0E 0D 0D 0E 0E 0E 0F 11 10 10
0x00001FF0 10 10 0E 10 0F 0E 0E 0D 0E 0E 0D 0D 0D 0F 10 10
0x00002000 11 10 10 11 10 10 0E 0E 0D 0C 0E 0E 0F 10 11 10
0x00002010 11 11 0F 0F 0E 0D 0D 0E 0E 11 10 10 10 0F 0E 0D
0x00002020 0D 0D 0D 0D 0D 0D 0D 0E 0D 0D 0C 0D 0D 0E 0E 0E
0x00002030 0D 0E 0C 0C 0E 0D 0E 0E 0F 0E 0E 0D 0E 0D 0D 0E
0x00002040 0E 0E 0E 0E 0E 0F 0E 0F 10 0F 10 10 0F 10 10 0F
0x00002050 10 10 0F 10 0E 10 10 12 10 10 11 14 15 16 16 16
0x00002060 17 17 17 16 16 18 16 16 16 18 17 16 16 16 15 16
0x00002070 16 16 16 17 17 16 16 16 15 16 15 14 12 12 12 13
0x00002080 12 12 11 11 11 10 12 11 12 13 11 11 11 11 12 12
0x00002090 12 12 11 12 12 11 12 10 11 11 12 11 10 0E 0F 0F
0x000020A0 0E 0E 10 0F 0F 0F 0E 0F 0E 0F 0E 0F 0F 0F 0D 0F
0x000020B0 0F 0F 0E 0F 0F 0F 0E 10 10 0F 10 11 11 10 11 12
0x000020C0 10 12 10 10 11 11 12 11 11 11 11 11 10 10 10 10
0x000020D0 11 10 11 11 10 12 10 10 11 10 12 12 12 13 13 12
0x000020E0 12 12 12 11 13 12 13 12 0B 0C 0C 0C 0C 0B 0B 0D
0x000020F0 0C 0C 0C 0C 0C 0B 0B 0C 0C 0D 0B 0C 0D 0D 0D 0C
0x00002100 0D 0D 0E 0E 0E 0F 0E 0F 0E 0F 0F 0F 11 10 13 12
0x00002110 11 11 10 0F 10 0F 0E 0E 0F 0E 0F 0F 0F 0D 0F 0E
0x00002120 0E 0E 0E 0C 0E 0E 0D 0E 0E 0C 0E 0D 0E 0F 0F 10
0x00002130 10 0E 10 0F 10 10 0E 0F 0F 0E 0D 0D 0D 0E 0D 0F
0x00002140 0F 10 10 11 11 11 11 10 10 10 0E 0D 0E 0E 0D 0D
0x00002150 0E 10 11 12 11 0F 10 0F 0D 0E 0E 0D 0E 11 11 11
0x00002160 0F 0F 0E 0D 0D 0D 0E 0D 0B 0D 0E 0D 0E 0E 0D 0C
0x00002170 0D 0F 0E 0D 0D 0C 0D 0D 0E 0D 0D 0D 0F 0E 0E 0E
0x00002180 0E 0E 0E 0E 0F 0D 0E 0E 0F 0F 0F 0F 0F 0E 0E 0E
0x00002190 0F 0E 10 10 0F 10 0D 0D 0E 0F 10 10 0E 10 12 14
0x000021A0 14 15 16 15 16 16 17 16 17 17 16 16 17 17 16 15
0x000021B0 16 15 17 17 17 17 16 16 16 18 17 16 17 15 14 13
0x000021C0 12 11 12 11 12 11 12 12 11 11 12 11 12 12 12 11
0x000021D0 12 13 11 12 11 11 12 11 11 10 11 11 11 12 10 0F
0x000021E0 11 10 10 0E 10 10 0F 10 0F 10 0F 0F 0F 0E 0F 0E
0x000021F0 0E 0E 0E 0F 0E 0E 0E 0F 0F 0E 0F 0F 10 10 11 11
0x00002200 11 10 11 12 12 12 12 10 10 11 12 11 12 11 11 0F
0x00002210 11 0F 10 11 10 10 10 10 11 10 10 0F 10 0F 11 10
0x00002220 13 13 12 12 12 14 13 12 13 13 13 12 0C 0B 0C 0B
0x00002230 0C 0B 0C 0C 0C 0C 0C 0B 0C 0B 0C 0C 0C 0D 0C 0C
0x00002240 0D 0D 0D 0D 0D 0B 0E 0D 0D 0E 0E 0E 0E 0F 10 0F
0x00002250 11 11 12 11 12 11 11 0F 0F 0F 0E 0E 0E 0F 0E 0E
0x00002260 0F 0E 0E 0F 0E 0E 0D 0C 0E 0C 0E 0F 0E 0E 0E 0E
0x00002270 0E 0E 0F 0F 10 0F 11 11 10 10 0E 0F 0E 0F 0E 0D
0x00002280 0F 0E 0E 0E 0D 11 0F 0F 10 0F 11 11 11 11 10 0E
0x00002290 0F 0D 0E 0D 0D 0F 10 11 11 0F 10 0F 0F 0D 0E 0E
0x000022A0 0D 0F 11 11 11 0F 0D 0E 0D 0D 0D 0D 0C 0D 0D 0D
0x000022B0 0D 0E 0C 0E 0E 0E 10 0E 0D 0C 0D 0C 0D 0E 0D 0D
0x000022C0 0E 0E 0E 0E 0C 0E 0F 0E 0D 0E 0E 0E 0F 10 0F 0F
0x000022D0 0E 0F 0F 0E 0F 0F 0F 0F 10 10 0E 0E 0E 0F 0F 0D
0x000022E0 0E 10 11 12 14 15 16 16 16 15 16 17 16 17 15 16
0x000022F0 16 18 16 17 17 15 16 16 17 17 16 16 16 15 15 16
0x00002300 15 15 14 12 12 12 11 12 13 12 13 12 11 10 12 11
0x00002310 11 12 12 11 11 12 12 11 10 11 12 10 10 12 11 11
0x00002320 12 12 12 12 11 12 11 11 10 0F 0F 0E 10 0F 0E 0F
0x00002330 0F 0E 0F 0E 0F 0E 0E 0F 0F 0F 0F 0F 10 0F 0E 0E
0x00002340 0E 0F 10 10 10 10 11 12 11 11 11 12 11 11 12 11
0x00002350 11 11 13 12 12 10 11 11 11 0F 10 10 0F 10 10 10
0x00002360 0F 0F 11 11 12 12 12 12 13 13 13 12 14 13 13 13
0x00002370 0B 0C 0C 0C 0C 0C 0D 0C 0D 0C 0B 0C 0B 0C 0C 0B
0x00002380 0C 0D 0C 0C 0D 0E 0D 0D 0C 0E 0D 0E 0D 0D 0F 0F
0x00002390 0D 0F 10 10 11 12 12 11 12 12 10 0F 10 0E 0D 0E
0x000023A0 0E 0F 0D 0E 0F 0F 0D 0F 0E 0E 0F 0E 0E 0D 0E 0E
0x000023B0 0D 0E 0E 0E 0F 0D 10 10 0F 11 10 11 11 0F 10 0F
0x000023C0 0F 0E 0D 0E 0E 0D 0D 0D 0F 11 0F 11 11 12 11 11
0x000023D0 12 10 10 10 0E 0E 0E 0E 0D 0F 10 10 12 11 10 11
0x000023E0 0E 0E 0D 0D 0E 0F 11 10 11 10 0E 0E 0E 0E 0D 0D
0x000023F0 0E 0D 0D 0E 0D 0D 0D 0E 0D 0F 0F 0E 0D 0D 0D 0D
0x00002400 0E 0D 0E 0E 0D 0E 0E 0D 0F 0F 10 10 11 0F 0F 0F
0x00002410 10 10 0F 10 10 10 0F 0F 0E 0F 0F 0F 0F 0E 0F 0D
0x00002420 0F 0E 0E 0F 0F 10 12 13 16 15 15 15 15 15 16 17
0x00002430 15 17 17 17 17 15 16 16 16 15 16 16 15 17 17 16
0x00002440 16 16 16 16 16 15 14 11 11 0F 11 12 13 12 12 12
0x00002450 11 12 12 11 12 12 10 11 11 12 12 12 12 12 12 10
0x00002460 12 11 11 11 11 12 11 11 11 10 11 10 11 11 10 11
0x00002470 11 0E 0F 0F 10 0F 0E 0F 0F 0F 0F 0E 0E 0D 0F 0F
0x00002480 10 10 0F 10 0F 0E 0F 10 0E 11 10 11 12 11 11 12
0x00002490 11 11 12 12 11 12 12 12 12 11 11 11 11 0F 10 10
0x000024A0 10 11 11 10 0F 10 0F 11 11 11 11 12 12 12 13 13
0x000024B0 13 14 14 13 0C 0C 0B 0B 0B 0C 0C 0B 0C 0C 0C 0C
0x000024C0 0C 0B 0B 0C 0C 0B 0C 0C 0D 0D 0D 0D 0C 0C 0E 0E
0x000024D0 0C 0D 0E 0F 0E 0F 0F 11 11 11 12 12 10 11 10 10
0x000024E0 10 10 0E 0D 0E 0E 0D 0E 0D 0E 0E 0E 0E 0C 0D 0D
0x000024F0 0D 0E 0D 0E 0E 0E 0F 0E 0D 10 0F 0E 0E 0E 10 10
0x00002500 11 0E 0E 0E 0E 0E 0E 0E 0D 0D 0C 0F 10 12 10 10
0x00002510 0F 11 10 11 10 10 11 0F 0D 0D 0E 0D 0D 0E 10 10
0x00002520 0F 11 0F 10 0E 0C 0D 0E 0E 0F 10 10 10 10 0E 0E
0x00002530 0E 0D 0C 0E 0D 0D 0D 0D 0C 0E 0C 0D 0E 0E 0F 0E
0x00002540 0C 0D 0C 0C 0D 0D 0C 0D 0E 0E 0E 0D 0E 0E 0E 10
0x00002550 10 10 0F 11 0F 0E 0F 0F 0E 0E 0F 10 0E 0F 0E 0F
0x00002560 0E 0F 0F 0F 0F 0D 0F 0E 0F 0F 12 13 14 14 13 15
0x00002570 14 16 15 16 15 15 16 15 15 16 16 15 16 16 16 17
0x00002580 15 16 16 15 16 16 14 16 15 14 13 12 12 11 12 13
0x00002590 12 12 11 10 11 11 11 11 11 11 12 12 11 11 11 10
0x000025A0 11 12 12 11 11 12 11 10 12 12 10 12 12 11 11 11
0x000025B0 11 10 11 0F 0F 10 0F 0F 10 10 0F 10 0E 0F 0F 0E
0x000025C0 0E 0E 0F 0E 0F 0E 0F 0F 0E 0F 0F 0F 0E 0E 0F 10
0x000025D0 10 10 11 11 11 11 12 12 11 10 12 11 11 13 11 12
0x000025E0 12 12 11 11 11 0F 10 0F 10 10 10 0F 0F 11 11 12
0x000025F0 12 12 12 13 13 13 12 13 0C 0B 0C 0C 0C 0C 0C 0C
0x00002600 0C 0C 0C 0C 0C 0C 0B 0C 0C 0D 0C 0C 0C 0D 0C 0C
0x00002610 0D 0D 0D 0D 0C 0E 0E 0E 0E 0F 0F 10 11 12 12 12
0x00002620 0F 11 10 0F 0E 0E 0E 0D 0D 0D 0E 0E 0E 0E 0E 0F
0x00002630 0E 0D 0E 0D 0D 0C 0D 0E 0D 0E 0E 0D 0F 0F 0F 10
0x00002640 0F 0F 0F 10 10 0F 0E 0F 0E 0D 0E 0E 0E 0E 0F 10
0x00002650 10 11 0F 10 10 10 10 11 10 11 11 0F 0D 0D 0D 0E
0x00002660 0D 0F 0E 10 10 10 10 0F 0F 0E 0E 0C 0D 0F 0E 0F
0x00002670 11 0F 0F 0E 0D 0C 0C 0D 0D 0C 0D 0C 0D 0D 0D 0C
0x00002680 0D 0E 0E 0F 0D 0B 0D 0C 0E 0D 0D 0C 0E 0D 0D 0F
0x00002690 0E 0F 10 11 10 11 12 10 11 11 11 10 11 0F 0F 0E
0x000026A0 0F 0F 0F 0F 0F 10 0F 10 0E 0E 0F 0F 10 12 13 14
0x000026B0 14 15 15 14 16 14 14 14 14 14 15 15 14 15 15 16
0x000026C0 16 14 15 14 16 16 14 15 15 16 14 15 14 13 13 12
0x000026D0 11 11 11 12 12 11 11 11 11 10 10 11 12 10 11 11
0x000026E0 12 12 11 11 12 11 12 11 11 12 11 12 11 12 11 12
0x000026F0 11 12 12 12 10 11 11 11 11 11 0F 10 0F 0F 0F 0E
0x00002700 0F 11 0E 0F 0F 0F 0D 0F 0F 0F 0E 0D 0E 0E 0E 0E
0x00002710 0F 0F 0E 0E 0E 10 0E 11 10 12 11 11 12 11 12 12
0x00002720 11 11 12 13 11 13 12 11 11 11 0F 10 0F 0F 11 11
0x00002730 10 0F 10 11 11 10 11 11 12 13 12 13 0B 0B 0C 0C
0x00002740 0C 0C 0C 0B 0D 0C 0D 0C 0D 0C 0D 0C 0D 0C 0C 0D
0x00002750 0D 0C 0C 0E 0D 0D 0D 0E 0E 0E 0E 0F 0D 0F 0F 10
0x00002760 11 12 13 13 10 11 11 10 0E 0E 0F 0E 0E 0E 0F 0F
0x00002770 0E 0E 0F 0E 0E 0D 0D 0F 0D 0E 0E 0D 0E 0E 0D 0F
0x00002780 10 11 0F 11 10 10 11 11 10 11 0F 0F 0E 0E 0E 0D
0x00002790 0E 0E 0F 10 10 0E 11 11 0F 11 11 12 11 10 10 10
0x000027A0 0E 0E 0E 0D 0E 0D 0E 0F 11 11 11 11 0F 0E 0D 0E
0x000027B0 0C 0E 0F 10 10 10 10 0E 0D 0D 0D 0D 0D 0D 0D 0D
0x000027C0 0D 0D 0C 0D 0D 0F 0F 0F 0D 0C 0D 0E 0D 0E 0E 0D
0x000027D0 0E 0D 0E 0E 0E 0F 10 10 12 12 11 12 12 12 12 11
0x000027E0 11 11 11 0F 10 10 0F 0F 10 0F 10 10 10 0F 0F 0F
0x000027F0 10 11 14 14 14 14 16 15 14 16 16 15 15 15 15 13
0x00002800 15 14 15 16 15 15 16 16 14 16 15 16 15 14 14 15
0x00002810 14 12 12 10 11 11 10 11 12 11 11 11 11 10 11 11
0x00002820 0F 11 12 12 11 11 11 11 11 11 11 11 12 11 11 11
0x00002830 12 12 11 12 11 12 12 11 12 11 11 11 13 12 11 0F
0x00002840 0F 0E 10 10 0F 0F 11 10 0F 11 10 0F 0F 0D 0F 0F
0x00002850 0E 10 0D 0F 0E 0E 0F 0F 10 0E 0F 0F 0F 11 11 10
0x00002860 12 11 12 12 12 12 13 12 13 12 13 12 12 12 12 11
0x00002870 11 10 11 0F 11 10 10 11 12 10 11 11 11 10 11 14
0x00002880 0C 0C 0C 0C 0C 0B 0B 0B 0C 0C 0B 0B 0C 0C 0C 0C
0x00002890 0D 0C 0D 0C 0C 0D 0D 0E 0E 0E 0D 0E 0D 0E 0E 0D
0x000028A0 0E 0F 10 10 0F 10 12 12 12 12 11 10 0F 0F 0E 0E
0x000028B0 0E 0F 0E 0E 0E 0E 0D 0E 0D 0C 0D 0C 0E 0D 0E 0D
0x000028C0 0E 0D 0E 0F 10 11 10 0F 10 10 10 10 10 0F 0E 0D
0x000028D0 0E 0E 0D 0D 0E 0E 0F 0F 11 11 10 10 10 11 11 10
0x000028E0 11 0F 10 10 0F 0E 0E 0E 0D 0E 0E 0F 11 10 11 0F
0x000028F0 10 0E 0E 0E 0E 0D 0F 11 11 11 0F 0F 0D 0D 0D 0D
0x00002900 0D 0E 0E 0D 0D 0E 0D 0D 0D 0C 0E 0F 0D 0D 0E 0D
0x00002910 0E 0D 0D 0E 0C 0D 0E 0D 0E 0E 10 10 10 11 13 11
0x00002920 12 13 12 12 12 11 11 11 11 10 10 10 0F 0F 0F 0E
0x00002930 10 0F 10 10 11 12 14 13 15 16 17 16 16 16 16 15
0x00002940 15 15 15 15 14 15 16 15 14 14 16 16 15 15 15 14
0x00002950 15 14 15 14 13 11 11 10 10 10 10 11 11 0F 0F 10
0x00002960 11 0F 11 10 10 11 11 12 11 11 11 11 12 11 11 11
0x00002970 11 12 12 10 11 11 12 12 13 12 11 11 12 11 13 12
0x00002980 14 12 12 10 10 10 0E 10 0F 10 10 11 11 10 10 11
0x00002990 10 10 0F 0F 0E 0E 0F 0E 0E 0F 0F 0F 0E 10 0F 0F
0x000029A0 0E 0F 10 11 11 12 11 12 12 10 13 12 14 13 12 12
0x000029B0 13 12 10 13 12 10 12 12 12 11 11 11 10 11 11 0F
0x000029C0 10 11 12 11 0B 0C 0C 0C 0C 0C 0B 0C 0C 0C 0C 0C
0x000029D0 0C 0D 0D 0B 0C 0C 0B 0C 0C 0C 0C 0D 0D 0D 0D 0E
0x000029E0 0D 0E 0F 0E 0F 0E 0E 0F 12 12 12 13 11 12 12 0F
0x000029F0 0F 0E 0F 0C 0E 0E 0E 0E 0E 0F 0E 0C 0D 0D 0C 0C
0x00002A00 0E 0E 0D 0D 0E 0D 0F 0F 0F 0F 11 0F 10 11 10 0F
0x00002A10 10 0F 0D 0E 0D 0C 0F 0D 0F 0F 11 11 12 10 11 12
0x00002A20 11 11 11 11 11 12 10 11 10 0E 0E 0D 0E 0D 0E 0E
0x00002A30 10 11 10 11 11 10 0E 0E 0D 0F 0E 10 10 10 10 0F
0x00002A40 0E 0E 0D 0E 0E 0D 0D 0D 0E 0C 0E 0D 0E 0E 0E 0E
0x00002A50 0E 0E 0D 0E 0D 0C 0D 0E 0E 0D 0D 0F 0E 0E 10 11
0x00002A60 11 12 12 12 13 12 12 13 13 12 13 13 12 12 13 12
0x00002A70 11 10 10 0F 11 11 10 12 12 13 16 16 16 16 15 16
0x00002A80 15 15 16 16 15 14 15 15 15 14 13 14 15 15 14 15
0x00002A90 16 15 15 15 14 15 14 14 13 11 10 10 11 11 10 11
0x00002AA0 10 11 11 11 11 0F 10 10 11 10 10 12 11 11 11 11
0x00002AB0 11 11 10 11 11 11 11 11 12 11 11 12 12 12 11 12
0x00002AC0 11 12 12 12 13 13 13 10 11 10 10 11 10 0F 10 10
0x00002AD0 10 12 10 0F 10 10 0F 10 0F 0D 0E 0F 0F 0F 10 0F
0x00002AE0 0F 0F 0F 0E 0F 0E 0E 0E 10 11 12 0F 12 12 12 13
0x00002AF0 14 14 14 14 14 13 13 13 12 12 13 13 12 10 11 12
0x00002B00 11 11 11 11 11 11 11 12 0C 0B 0B 0C 0C 0C 0B 0C
0x00002B10 0C 0B 0C 0D 0C 0C 0C 0D 0C 0C 0C 0D 0D 0C 0D 0C
0x00002B20 0D 0D 0D 0D 0D 0D 0E 0F 0F 10 10 10 11 13 12 13
0x00002B30 12 10 11 10 10 10 0F 0E 0E 0E 10 0F 0F 0E 0E 0D
0x00002B40 0D 0D 0C 0E 0D 0D 0E 0E 0E 0F 0E 10 11 10 11 10
0x00002B50 11 10 11 10 0F 0D 0E 0E 0D 0D 0E 0E 0F 10 0F 12
0x00002B60 11 11 11 11 10 0F 10 11 10 11 11 10 11 10 0D 0D
0x00002B70 0E 0E 0E 0F 0F 11 12 11 11 0F 0F 0D 0E 0D 0E 10
0x00002B80 10 11 10 0F 0E 0D 0D 0D 0D 0E 0D 0D 0D 0D 0D 0E
0x00002B90 0E 0E 0E 0F 0D 0D 0D 0D 0D 0D 0D 0D 0E 0E 0E 0D
0x00002BA0 0E 0E 10 11 12 11 13 13 12 12 12 13 12 13 12 14
0x00002BB0 12 12 12 13 13 13 13 12 12 12 11 12 14 15 16 17
0x00002BC0 17 16 16 16 14 17 16 15 16 15 16 16 16 15 14 15
0x00002BD0 15 16 15 15 14 15 16 16 16 15 14 14 12 12 0F 10
0x00002BE0 10 10 10 0F 10 10 10 11 10 11 10 10 0F 11 11 11
0x00002BF0 11 11 11 11 12 11 12 12 11 11 11 11 11 11 11 11
0x00002C00 12 12 12 11 11 12 12 13 13 13 13 12 11 11 11 10
0x00002C10 11 10 10 10 11 11 11 10 11 12 10 10 10 0F 0F 0F
0x00002C20 0E 10 0F 0E 11 10 11 11 0F 0F 0E 0F 0E 10 10 10
0x00002C30 11 12 12 12 12 13 14 14 14 14 13 13 13 13 13 11
0x00002C40 12 12 13 11 11 10 10 12 10 11 0F 11 0B 0C 0C 0B
0x00002C50 0C 0C 0D 0C 0D 0C 0D 0C 0B 0C 0C 0D 0C 0C 0C 0C
0x00002C60 0E 0D 0E 0E 0E 0E 0E 0E 0D 0F 0E 0D 10 0F 10 10
0x00002C70 11 12 13 15 12 13 12 11 10 0F 0F 0F 0F 0F 0E 0F
0x00002C80 0F 0E 0E 0D 0E 0C 0D 0E 0E 0D 0D 0E 0E 0F 10 11
0x00002C90 12 11 11 12 10 11 11 10 0F 0E 0E 0F 0F 0E 0E 0E
0x00002CA0 0E 12 12 10 10 11 11 0F 11 0F 0F 12 10 12 12 11
0x00002CB0 12 10 10 0E 0E 0E 0E 0F 10 11 12 11 11 10 0F 0E
0x00002CC0 0D 0D 0D 0F 11 0F 11 10 0F 0E 0F 0D 0E 0C 0D 0D
0x00002CD0 0D 0E 0D 0C 0D 0D 10 10 0F 0D 0D 0E 0D 0E 0E 0D
0x00002CE0 0E 0D 0E 0E 0E 10 10 13 12 12 13 13 14 14 14 13
0x00002CF0 14 14 13 13 13 14 15 13 15 15 13 13 13 12 12 11
0x00002D00 13 15 16 17 17 18 18 18 17 18 17 17 15 15 17 16
0x00002D10 17 16 15 16 15 16 15 15 15 15 16 16 15 15 15 13
0x00002D20 11 11 12 10 11 11 10 10 10 0F 0F 10 11 11 11 12
0x00002D30 11 11 10 12 11 12 11 11 11 11 11 12 12 12 12 12
0x00002D40 11 12 13 12 12 11 11 11 11 11 12 13 15 15 13 13
0x00002D50 12 12 11 11 10 12 11 10 0F 11 11 10 10 12 12 11
0x00002D60 10 12 10 10 10 0F 0F 0F 0F 10 11 12 11 11 0F 10
0x00002D70 0F 10 0F 10 11 11 12 13 12 15 14 14 15 14 14 15
0x00002D80 14 14 15 14 15 14 14 13 13 13 12 12 11 12 11 10
0x00002D90 0C 0B 0B 0C 0C 0C 0D 0C 0C 0C 0C 0D 0B 0C 0C 0D
0x00002DA0 0C 0C 0D 0D 0E 0E 0E 0E 0D 0E 0E 0E 10 0F 0E 0F
0x00002DB0 0F 0F 10 10 12 13 13 15 14 13 12 11 11 10 0F 10
0x00002DC0 0E 0F 0F 0F 0E 0D 0E 0D 0D 0D 0D 0E 0D 0D 0E 0F
0x00002DD0 0F 10 11 11 11 11 11 12 11 11 11 0F 0F 0E 0E 0E
0x00002DE0 0F 0F 0F 10 10 12 11 12 11 11 12 10 11 0F 0F 11
0x00002DF0 12 11 11 13 12 11 10 0E 0E 0E 0D 0D 0F 10 11 11
0x00002E00 12 12 10 0F 0E 0E 0E 0F 10 11 11 11 0F 0D 0E 0E
0x00002E10 0D 0C 0E 0D 0C 0D 0E 0D 0D 0E 0F 0F 0E 0D 0E 0D
0x00002E20 0D 0E 0D 0E 0D 0D 0E 0D 0F 0F 0F 11 12 13 13 12
0x00002E30 15 13 14 12 14 14 13 14 14 13 14 15 14 15 14 13
0x00002E40 14 14 14 13 15 17 17 18 18 16 18 18 18 18 16 17
0x00002E50 16 17 16 15 15 15 16 14 15 16 14 14 14 16 15 15
0x00002E60 16 16 15 13 13 12 11 11 11 11 11 10 11 11 10 11
0x00002E70 11 11 10 11 11 11 11 11 11 11 11 12 10 12 12 11
0x00002E80 12 12 11 12 11 11 12 12 12 12 13 12 13 12 11 14
0x00002E90 15 14 14 14 13 12 13 12 12 12 13 11 12 0F 12 12
0x00002EA0 11 11 11 12 11 11 11 11 11 10 10 0F 10 11 12 10
0x00002EB0 12 12 10 10 10 0F 0F 0F 10 11 11 12 13 13 14 15
0x00002EC0 15 15 15 16 14 15 15 14 16 15 14 14 14 14 13 12
0x00002ED0 11 10 12 11 0C 0C 0C 0C 0D 0C 0B 0C 0D 0C 0C 0C
0x00002EE0 0D 0D 0D 0E 0C 0D 0C 0E 0E 0C 0D 0E 0D 0E 0E 0D
0x00002EF0 0E 0D 10 0E 0F 10 10 11 11 13 14 16 15 14 12 12
0x00002F00 11 10 0F 0E 0F 0D 0F 0E 0F 0E 0D 0E 0E 0D 0E 0D
0x00002F10 0D 0E 0D 0F 0F 0F 11 10 11 12 11 12 12 10 0F 0F
0x00002F20 0F 0E 0D 0F 0E 0E 0E 0F 12 12 11 12 13 12 11 11
0x00002F30 10 0F 0F 0E 10 12 12 12 11 12 12 0F 0E 0E 0F 0E
0x00002F40 0D 11 12 11 11 11 10 0F 0F 0D 0F 0F 10 11 10 10
0x00002F50 0F 0E 0C 0E 0E 0D 0E 0D 0D 0E 0C 0E 0E 0E 0F 0F
0x00002F60 11 0F 0E 0D 0E 0E 0D 0E 0D 0E 0E 0F 0E 0F 0F 12
0x00002F70 12 11 12 14 13 13 14 15 14 14 13 14 15 13 14 14
0x00002F80 15 14 14 15 16 14 15 14 15 19 1A 1B 18 19 19 18
0x00002F90 18 18 17 18 17 17 17 17 18 16 17 15 15 15 16 16
0x00002FA0 16 15 16 16 16 16 14 13 12 11 12 10 12 12 11 11
0x00002FB0 11 11 11 11 10 10 11 11 12 12 12 11 10 11 11 11
0x00002FC0 10 11 11 10 11 11 10 11 11 11 12 11 12 12 11 11
0x00002FD0 13 12 11 12 13 16 15 14 12 11 12 12 12 11 12 12
0x00002FE0 12 11 11 10 11 11 11 12 12 12 12 11 12 11 11 11
0x00002FF0 11 10 10 11 11 13 12 11 11 11 11 10 0F 10 11 11
0x00003000 11 12 14 12 15 15 16 15 16 15 14 16 16 15 15 14
0x00003010 14 14 14 14 13 11 12 11 0B 0C 0C 0D 0D 0C 0D 0C
0x00003020 0C 0E 0B 0C 0D 0D 0D 0C 0D 0D 0E 0D 0D 0D 0D 0E
0x00003030 0E 0F 0F 0E 0E 10 10 0F 10 0F 10 10 12 12 14 17
0x00003040 16 14 13 12 11 10 10 0E 0F 0F 0F 0F 0E 0E 0E 0E
0x00003050 0E 0E 0E 0E 0E 0E 0F 10 0F 10 11 11 12 12 12 11
0x00003060 12 11 10 0F 0E 0F 0F 0E 0E 0F 0E 11 11 11 12 10
0x00003070 12 12 11 11 0E 0F 0E 0F 12 11 10 11 12 12 12 11
0x00003080 0F 0E 0E 0E 0E 0F 0F 11 13 12 12 10 0E 0F 0E 0D
0x00003090 10 10 10 10 10 0E 0E 0D 0C 0E 0D 0D 0E 0E 0E 0E
0x000030A0 0E 0D 0D 0E 11 0E 0E 0D 0E 0E 0E 0E 0F 0E 0D 0F
0x000030B0 0E 0D 10 11 12 11 12 13 13 11 14 14 13 13 14 15
0x000030C0 14 14 16 14 15 16 15 16 16 16 16 14 18 1A 1B 1A
0x000030D0 1A 1A 18 19 18 19 18 18 18 17 17 17 16 17 16 16
0x000030E0 17 16 15 15 17 16 15 16 15 16 14 12 11 0F 11 11
0x000030F0 11 12 11 11 10 12 11 12 11 12 11 11 11 11 11 12
0x00003100 11 12 12 11 12 11 11 12 11 12 12 11 12 12 11 11
0x00003110 11 10 12 11 11 12 12 12 14 15 15 13 14 13 12 11
0x00003120 13 13 12 13 13 12 12 12 12 11 10 12 11 12 12 12
0x00003130 11 11 12 11 13 11 11 11 11 11 0F 11 11 11 11 10
0x00003140 0F 0F 10 10 11 12 12 13 13 14 15 15 16 16 15 17
0x00003150 15 16 15 16 15 15 14 13 14 13 12 13 0C 0D 0C 0D
0x00003160 0C 0D 0C 0D 0D 0D 0B 0D 0D 0D 0D 0C 0D 0D 0D 0D
0x00003170 0D 0E 0E 0E 0E 0E 0E 0E 0E 0D 0F 10 0F 10 11 11
0x00003180 11 13 16 16 16 15 14 12 11 12 0F 0F 0F 0F 0F 0E
0x00003190 0D 0E 0D 0F 0E 0D 0E 0D 0E 0E 0F 11 10 10 11 10
0x000031A0 11 11 11 11 11 0F 0F 0F 0F 0E 0E 0E 0F 0F 10 11
0x000031B0 12 11 12 12 11 10 10 0F 0E 0F 0F 0F 0F 10 11 12
0x000031C0 13 12 12 11 10 10 0E 0D 0E 11 0F 11 12 11 11 0E
0x000031D0 0E 0E 0F 0E 0E 11 12 11 10 0E 0E 0E 0D 0D 0E 0E
0x000031E0 0F 0D 0E 0D 0D 0D 0E 0F 0F 0E 0E 0E 0E 0E 0E 0E
0x000031F0 0E 0F 0E 0E 0F 0F 0F 12 11 13 11 11 12 12 13 13
0x00003200 13 13 14 16 14 15 16 15 15 15 16 16 17 17 16 17
0x00003210 19 1C 1A 1C 1B 1A 1B 1A 18 19 18 19 17 17 17 18
0x00003220 17 18 17 17 17 14 16 15 15 15 14 15 15 15 13 12
0x00003230 0F 10 11 11 10 11 11 10 12 11 12 0F 12 12 11 11
0x00003240 12 12 11 10 12 12 11 12 13 12 12 12 11 12 13 11
0x00003250 11 12 12 12 11 11 11 12 12 12 12 12 16 13 14 14
0x00003260 13 13 12 12 12 13 12 13 12 13 12 12 13 10 11 12
0x00003270 10 11 12 13 12 12 12 11 13 11 12 11 10 11 11 11
0x00003280 11 11 11 10 10 10 10 10 10 0F 10 10 11 13 13 14
0x00003290 15 15 16 15 16 15 14 16 15 14 15 12 15 15 15 14
0x000032A0 0C 0C 0C 0C 0C 0D 0D 0D 0B 0C 0D 0D 0D 0D 0D 0D
0x000032B0 0D 0D 0D 0D 0E 0E 0E 0E 0E 0E 0D 0D 0E 0E 0E 0F
0x000032C0 0F 0F 11 11 12 13 14 16 17 15 13 12 0F 10 11 0F
0x000032D0 0E 0E 0E 0F 0E 0E 0E 0E 0D 0D 0D 0E 0E 0F 0F 11
0x000032E0 11 11 11 11 11 11 11 11 11 0E 0E 0E 0E 0E 0F 0F
0x000032F0 0F 0F 11 11 11 10 12 11 12 10 0F 0F 0D 0E 0E 0D
0x00003300 0F 11 12 12 12 12 12 11 0F 0E 0E 0E 0E 0E 10 10
0x00003310 11 10 11 11 0E 0C 0E 0E 0F 11 11 11 10 0E 0D 0E
0x00003320 0E 0D 0D 0D 0D 0E 0D 0E 0D 0C 0C 0E 0F 0E 0D 0D
0x00003330 0E 0D 0E 0E 0F 0E 0E 0F 0D 0F 11 13 13 12 12 12
0x00003340 13 12 11 12 13 13 13 14 13 14 15 14 15 14 16 16
0x00003350 16 15 17 16 18 1B 1D 1B 1B 1B 1A 1B 1B 19 19 1A
0x00003360 17 19 17 18 16 17 17 17 17 16 15 16 16 17 15 16
0x00003370 14 14 12 11 0F 0F 11 11 11 10 10 10 11 11 10 11
0x00003380 0F 10 0F 11 11 11 10 12 11 10 10 11 11 12 12 10
0x00003390 12 12 11 12 11 12 12 12 11 12 11 10 13 12 13 13
0x000033A0 12 13 13 13 13 11 12 12 12 12 12 12 12 11 12 12
0x000033B0 12 12 12 12 11 10 10 10 11 12 12 11 10 11 12 12
0x000033C0 12 12 11 0F 11 0F 11 11 10 11 0F 0E 10 10 0F 0E
0x000033D0 11 10 12 12 14 13 15 15 16 15 17 16 16 15 16 14
0x000033E0 13 14 15 14 0C 0C 0C 0C 0D 0C 0C 0C 0C 0B 0C 0D
0x000033F0 0D 0C 0C 0B 0D 0D 0D 0D 0E 0D 0E 0D 0E 0E 0C 0E
0x00003400 0E 0D 0E 10 0F 10 10 10 11 12 14 16 16 16 13 12
0x00003410 10 10 11 0F 0E 0F 0E 0D 0E 0F 0D 0E 0E 0D 0F 0E
0x00003420 0E 10 11 11 10 10 11 11 10 11 12 10 0F 0E 0E 0E
0x00003430 0F 0E 0F 0F 0F 10 11 12 11 10 13 11 12 11 0E 0F
0x00003440 0F 0E 0E 0E 0F 0F 11 12 12 12 10 11 11 0F 0F 0D
0x00003450 0F 0C 0D 11 11 12 11 11 10 0E 0E 0E 0E 11 11 11
0x00003460 0F 0E 0E 0D 0E 0E 0C 0E 0E 0E 0E 0D 0D 0D 0E 0D
0x00003470 0D 0E 0D 0E 0D 0E 0E 0E 0E 0F 0E 0E 0E 0E 10 12
0x00003480 12 12 12 13 12 13 12 11 13 13 12 13 13 14 14 14
0x00003490 14 15 16 16 15 15 17 18 1B 1B 1C 1A 1A 1C 1C 1B
0x000034A0 1B 1B 1A 1A 19 19 17 18 17 17 15 16 17 18 17 16
0x000034B0 16 16 17 16 15 14 11 11 10 10 0F 10 0E 0F 10 10
0x000034C0 11 11 11 0F 11 11 12 10 12 11 12 10 12 10 12 11
0x000034D0 12 12 12 12 12 11 12 11 13 12 12 12 11 11 12 12
0x000034E0 11 12 12 12 12 12 12 12 12 12 12 11 11 11 11 12
0x000034F0 12 13 12 12 13 12 12 13 11 12 12 12 12 12 12 12
0x00003500 12 12 13 13 11 12 13 12 12 12 11 12 11 11 10 11
0x00003510 10 10 0F 0F 0E 11 10 10 11 13 14 14 15 15 17 15
0x00003520 17 16 14 15 15 14 15 15 0D 0C 0C 0C 0C 0C 0D 0D
0x00003530 0C 0C 0C 0D 0C 0D 0D 0C 0D 0D 0E 0D 0E 0E 0E 0D
0x00003540 0C 0D 0E 0D 0F 0E 0E 0E 0F 10 11 11 12 12 14 16
0x00003550 15 15 14 13 12 10 11 0E 0F 0F 0E 0E 0F 0E 0D 0E
0x00003560 0F 0E 0F 0F 10 10 11 11 11 11 11 12 12 11 12 11
0x00003570 0F 0E 0F 0E 0D 0F 0E 0E 10 11 12 12 13 12 12 12
0x00003580 11 0F 0E 0F 0E 0F 0D 0D 0F 10 11 11 11 11 12 12
0x00003590 12 0F 0E 0E 0E 0D 0F 10 12 12 12 11 10 0F 0D 0E
0x000035A0 0F 0F 11 0F 11 10 0E 0C 0E 0E 0E 0D 0D 0D 0C 0D
0x000035B0 0E 0E 0C 0D 0C 0C 0E 0E 0C 0D 0E 0E 0E 0F 0F 0E
0x000035C0 0E 0F 11 13 13 13 13 13 14 12 12 13 13 12 13 13
0x000035D0 13 14 12 12 14 14 15 14 16 16 18 18 1C 1C 1B 1C
0x000035E0 1C 1C 1C 1B 1B 1B 1A 1A 1B 18 19 18 19 18 18 17
0x000035F0 17 17 17 17 16 16 15 15 13 13 11 10 0F 0E 0F 10
0x00003600 11 0F 10 0F 10 0F 10 10 11 0F 11 12 11 10 10 10
0x00003610 11 11 12 12 11 12 11 12 13 12 12 12 12 12 12 12
0x00003620 11 12 13 12 12 13 13 12 12 12 12 12 12 11 10 12
0x00003630 12 11 12 12 12 12 14 12 12 13 12 12 12 13 12 12
0x00003640 10 11 12 13 12 12 13 13 12 12 13 13 12 13 12 12
0x00003650 11 10 0F 10 10 10 11 10 11 10 11 11 11 10 11 12
0x00003660 14 14 16 15 16 16 16 17 16 16 15 15 0C 0D 0C 0C
0x00003670 0C 0C 0B 0C 0C 0C 0D 0D 0C 0C 0D 0C 0D 0E 0D 0D
0x00003680 0E 0D 0E 0D 0D 0D 0E 10 0D 0F 0F 11 0F 0F 10 11
0x00003690 10 12 14 15 15 15 15 13 12 11 0E 0F 0E 0F 0E 0E
0x000036A0 0E 0D 0C 0E 0F 0F 0F 10 0F 11 11 11 0F 11 0F 11
0x000036B0 12 10 0F 0F 0E 0F 0F 0F 0F 0E 0F 10 10 11 12 11
0x000036C0 12 12 12 12 11 10 0F 0E 0D 0E 0E 0D 0F 0F 10 12
0x000036D0 12 13 12 12 12 11 0F 0E 0E 0E 0E 10 11 12 11 11
0x000036E0 11 0F 0D 0E 0E 11 0F 10 0F 0F 0D 0D 0D 0E 0E 0D
0x000036F0 0C 0D 0F 0E 0C 0D 0C 0C 0D 0D 0D 0D 0D 0E 0F 0E
0x00003700 0E 0F 0E 0F 0F 0F 11 13 13 14 12 15 14 14 13 13
0x00003710 14 15 14 14 14 14 14 13 14 13 14 15 14 16 16 1A
0x00003720 1C 1C 1C 1C 1A 1E 1E 1B 1C 1B 1C 1B 1A 1A 18 19
0x00003730 19 1A 19 18 17 17 16 17 17 15 16 16 14 12 11 10
0x00003740 10 0F 0E 0F 0F 0F 0F 0F 10 10 0F 11 10 10 11 11
0x00003750 11 10 10 11 10 12 12 11 12 13 11 12 12 12 13 12
0x00003760 12 12 12 12 12 12 12 12 14 13 13 13 12 14 12 12
0x00003770 12 11 12 11 12 11 12 11 10 13 12 12 11 11 13 12
0x00003780 12 12 12 12 13 12 12 11 12 12 12 13 13 13 12 11
0x00003790 13 13 12 11 12 13 12 10 11 10 10 11 10 0F 10 10
0x000037A0 11 11 10 12 13 14 12 16 16 16 17 17 16 17 17 15
0x000037B0 0D 0B 0C 0C 0B 0D 0C 0C 0C 0D 0D 0D 0D 0D 0D 0D
0x000037C0 0D 0C 0D 0C 0D 0E 0D 0E 0E 0D 0F 0F 0F 0F 0E 0F
0x000037D0 10 11 10 11 12 12 14 14 15 15 15 14 11 10 11 0F
0x000037E0 0F 0F 0D 0F 0F 0E 0E 0E 0F 0F 0E 0F 0E 11 10 11
0x000037F0 12 12 12 11 11 11 10 0E 0F 0F 0F 0E 0F 0E 0E 10
0x00003800 12 12 11 12 12 11 13 12 10 0F 0E 0F 0F 0D 0E 0E
0x00003810 0F 0F 0F 10 12 13 12 10 12 12 10 0E 0E 0D 0F 0F
0x00003820 11 12 12 12 11 0D 0C 0E 0F 0F 10 11 0F 0D 0D 0D
0x00003830 0E 0E 0D 0D 0E 0E 0E 0E 0D 0D 0D 0D 0D 0D 0D 0E
0x00003840 0E 0E 0E 0D 0E 0E 0E 0E 0D 0E 0F 12 13 14 14 13
0x00003850 14 14 13 14 16 14 14 13 14 14 13 15 14 14 14 15
0x00003860 14 13 16 19 1B 1C 1B 1C 1B 1C 1B 1E 1B 1B 1D 1B
0x00003870 1B 1A 1A 19 18 19 18 18 17 17 18 19 17 16 15 15
0x00003880 14 12 11 10 0F 0F 10 10 11 0F 0E 10 0E 0F 0E 10
0x00003890 0E 10 10 10 10 10 11 11 10 12 11 12 11 12 12 12
0x000038A0 12 13 12 11 12 12 11 12 12 13 12 12 12 12 13 14
0x000038B0 15 15 13 14 14 13 12 13 12 13 12 12 11 12 12 12
0x000038C0 12 12 12 13 14 14 13 14 14 13 12 11 12 12 12 11
0x000038D0 13 13 12 13 12 13 13 14 14 12 12 11 11 11 11 12
0x000038E0 11 11 11 11 12 11 11 0E 10 11 12 14 14 16 16 17
0x000038F0 17 17 17 16 0C 0D 0C 0B 0C 0C 0C 0D 0D 0D 0D 0D
0x00003900 0D 0D 0C 0E 0C 0D 0C 0E 0D 0F 0E 0E 0F 0F 0F 0E
0x00003910 10 0F 10 10 10 11 10 10 12 13 13 15 16 15 15 14
0x00003920 11 13 10 11 0F 0F 0F 0E 0E 0E 0E 0E 0E 0E 0E 0F
0x00003930 11 11 11 10 10 11 12 11 11 11 0F 0F 0E 0E 0F 0E
0x00003940 0F 0F 0F 11 12 12 12 12 13 13 12 10 10 0F 0F 0F
0x00003950 0F 0E 0D 0E 0F 0E 0E 0F 12 11 12 11 12 10 10 0F
0x00003960 0F 0D 0E 0F 11 12 12 11 10 0F 0E 0F 0E 0F 11 11
0x00003970 0F 0E 0D 0D 0D 0D 0E 0E 0E 0E 0E 0D 0D 0D 0C 0D
0x00003980 0B 0D 0C 0E 0D 0D 0E 0E 0F 0E 0F 0E 0D 0D 10 0F
0x00003990 13 13 13 13 13 13 15 14 14 15 13 15 14 15 13 15
0x000039A0 15 14 14 14 13 14 16 18 1A 1B 1B 1C 1A 1C 1C 1C
0x000039B0 19 1B 1C 1A 19 1A 1A 19 19 18 19 18 18 17 17 18
0x000039C0 19 17 15 16 14 11 11 0F 0F 0F 10 0F 0D 0F 11 0F
0x000039D0 0E 0E 0E 10 0F 11 10 10 11 10 10 11 11 11 12 11
0x000039E0 11 12 11 12 12 12 12 13 12 12 12 12 12 12 12 12
0x000039F0 13 13 14 14 14 16 15 15 14 13 14 13 12 13 13 12
0x00003A00 13 13 13 13 12 11 11 13 13 13 14 12 13 14 13 13
0x00003A10 11 12 12 12 12 11 12 12 11 12 12 14 14 13 14 12
0x00003A20 13 12 12 11 12 11 11 11 0F 10 11 10 10 11 10 11
0x00003A30 11 13 16 17 16 16 15 17 0D 0D 0E 0C 0D 0C 0E 0E
0x00003A40 0D 0D 0D 0D 0D 0D 0D 0E 0D 0E 0E 0D 0D 0E 0E 0E
0x00003A50 0E 0F 0F 0E 0F 10 10 10 0F 10 11 11 13 12 14 13
0x00003A60 16 16 15 14 13 11 11 10 0F 0F 0F 0E 0F 0F 0F 0F
0x00003A70 0F 10 0F 10 11 11 12 11 12 11 12 11 11 11 10 10
0x00003A80 0F 0F 10 0F 0E 10 10 12 12 13 13 13 13 12 11 10
0x00003A90 0F 0F 0E 0F 0F 0E 0F 0E 0E 0D 0E 0F 11 13 13 13
0x00003AA0 12 12 0F 0F 10 0F 0F 10 11 12 11 11 0F 0E 0F 0E
0x00003AB0 10 11 10 10 10 0E 0D 0E 0D 0E 0D 0E 0E 0D 0E 0E
0x00003AC0 0D 0D 0D 0C 0C 0D 0E 0D 0D 0D 0E 0F 0F 0E 0F 0E
0x00003AD0 0E 10 10 12 12 13 15 14 13 14 15 14 15 16 15 16
0x00003AE0 15 16 16 16 15 16 15 15 15 15 16 19 1B 1A 1A 1B
0x00003AF0 1C 1B 1C 1B 1B 1C 1C 1B 1A 1A 1A 1B 19 19 19 19
0x00003B00 18 18 18 17 1A 17 18 16 14 12 12 12 10 0F 11 10
0x00003B10 0F 0E 10 11 10 10 0F 10 10 0F 10 10 10 0E 10 11
0x00003B20 10 12 10 10 11 11 12 13 12 12 12 13 12 12 13 11
0x00003B30 12 13 12 13 12 14 14 14 15 15 16 16 14 16 15 15
0x00003B40 14 14 14 14 14 14 13 13 13 14 14 13 13 13 14 13
0x00003B50 14 13 13 15 14 14 13 13 12 13 13 14 14 14 13 13
0x00003B60 13 14 14 14 14 13 12 11 13 12 11 12 11 11 13 12
0x00003B70 11 11 11 12 12 12 12 15 15 17 17 17 0D 0D 0C 0D
0x00003B80 0D 0E 0E 0E 0C 0D 0E 0D 0D 0E 0E 0E 0F 0E 0D 0E
0x00003B90 0E 0E 0F 0F 0E 0F 0E 0F 10 0E 0F 10 10 10 11 11
0x00003BA0 12 12 14 16 15 16 16 14 13 11 12 11 11 10 0F 0E
0x00003BB0 0F 0F 11 0E 10 10 11 11 11 12 12 11 12 13 11 12
0x00003BC0 12 11 10 0F 11 10 0F 10 0F 10 11 13 12 13 13 14
0x00003BD0 13 11 12 0F 0F 10 0E 10 0E 0F 0F 0E 10 10 0F 10
0x00003BE0 12 12 12 12 13 10 10 0F 0F 0F 0E 11 11 13 12 11
0x00003BF0 10 0D 10 10 11 11 10 10 0E 0E 0E 0D 0E 0D 0E 0F
0x00003C00 0F 0E 0E 0E 0E 0D 0D 0D 0D 0E 0C 0E 0E 0E 0E 0E
0x00003C10 0E 0E 0D 0F 0E 10 0F 10 12 13 12 13 13 13 15 15
0x00003C20 14 15 14 16 16 15 16 16 16 16 16 16 18 17 1A 19
0x00003C30 1B 1B 1A 1B 1B 1C 1C 1B 1A 1C 1A 1A 1B 1B 1B 1B
0x00003C40 1A 19 1A 19 1A 18 19 19 16 19 17 16 15 13 12 12
0x00003C50 10 11 12 11 12 10 10 10 0F 0F 10 10 0F 0F 11 0F
0x00003C60 0F 11 10 10 12 10 11 10 10 10 12 12 12 12 12 12
0x00003C70 13 13 11 12 13 11 13 13 14 13 15 15 15 17 17 15
0x00003C80 16 16 17 16 15 15 15 14 14 16 15 15 15 16 14 15
0x00003C90 15 15 15 14 14 15 13 13 14 13 12 12 12 12 12 12
0x00003CA0 15 14 14 13 14 13 13 14 14 16 14 14 13 11 12 12
0x00003CB0 11 12 13 12 12 10 10 12 12 10 11 12 13 15 17 17
0x00003CC0 0D 0D 0C 0D 0E 0E 0E 0D 0E 0D 0E 0E 0E 0E 0E 0D
0x00003CD0 0C 0D 0E 0D 0E 0E 0E 0F 0E 0F 0F 0F 0F 11 0F 11
0x00003CE0 11 10 10 11 12 11 14 13 16 16 16 14 14 12 11 12
0x00003CF0 11 10 10 0E 11 0E 0E 0E 10 10 11 11 12 12 13 11
0x00003D00 11 10 12 10 12 11 0E 0F 11 0E 10 0F 10 10 12 12
0x00003D10 14 12 13 13 13 13 11 0F 0F 0F 0F 0F 10 0F 0D 0E
0x00003D20 0F 10 11 11 12 13 12 12 13 0F 0F 0F 0F 0F 10 11
0x00003D30 11 12 12 0F 0F 0E 0F 10 11 11 11 0E 0F 0E 0E 0E
0x00003D40 0E 0E 0E 0E 0D 0D 0F 0E 0E 0D 0D 0D 0D 0F 0E 0E
0x00003D50 0D 0C 0D 0E 0E 0F 0F 0D 0E 10 10 0F 11 11 11 14
0x00003D60 12 12 15 15 14 14 15 15 16 16 16 16 15 17 18 18
0x00003D70 17 17 19 1B 1C 1B 1B 1C 1C 1A 1B 1A 19 1A 1B 18
0x00003D80 1A 19 1B 19 1A 1A 1A 18 19 19 18 19 18 19 17 15
0x00003D90 14 13 13 11 13 12 12 12 12 11 11 11 11 11 10 10
0x00003DA0 0F 0F 10 10 10 11 0F 0F 11 10 10 11 11 12 12 11
0x00003DB0 12 12 12 12 12 12 12 13 13 12 12 13 14 13 14 15
0x00003DC0 16 16 16 17 16 16 16 16 17 15 15 14 16 15 16 16
0x00003DD0 15 16 16 16 18 17 17 16 16 15 15 15 14 13 13 13
0x00003DE0 13 12 13 14 14 15 15 15 13 12 14 15 14 14 16 15
0x00003DF0 14 14 13 11 11 12 12 12 13 13 13 13 11 12 11 11
0x00003E00 12 12 14 14 0D 0E 0E 0E 0E 0D 0E 0E 0D 0E 0E 0E
0x00003E10 0C 0D 0E 0D 0E 0E 0F 0E 0E 0E 0F 0E 0F 10 10 0F
0x00003E20 10 10 0F 11 11 11 12 11 12 13 14 15 15 17 17 16
0x00003E30 15 13 13 12 11 10 10 10 0F 0F 0F 10 11 10 11 11
0x00003E40 12 12 12 12 12 12 11 12 12 11 10 0F 10 11 11 0F
0x00003E50 10 11 12 13 13 13 13 12 11 13 11 10 0F 10 10 10
0x00003E60 0F 10 0F 0F 0E 10 10 11 13 12 13 13 12 11 0F 0F
0x00003E70 0F 0F 11 11 12 12 11 0F 0E 0F 0F 11 12 12 10 10
0x00003E80 0E 0F 0E 0E 0D 0E 0E 0F 0F 0E 0F 0F 0D 0E 0E 0E
0x00003E90 0E 0E 0E 0F 0E 0E 0D 0D 0F 0E 0D 0F 0F 0F 0E 0E
0x00003EA0 0F 0F 10 10 10 12 13 13 14 14 14 16 15 15 16 16
0x00003EB0 16 18 18 17 19 18 1B 1C 1C 1D 1C 1D 1B 1C 1B 1C
0x00003EC0 1B 1B 1A 19 19 1A 19 1B 1B 1B 1A 1A 19 1A 18 1A
0x00003ED0 1A 17 18 15 12 12 12 13 14 12 13 13 12 12 13 12
0x00003EE0 11 12 10 11 10 10 10 10 0F 0E 10 10 0F 11 10 0F
0x00003EF0 10 11 11 11 10 11 12 12 13 13 12 12 12 13 12 14
0x00003F00 11 14 14 16 15 16 17 18 17 18 17 16 16 17 15 17
0x00003F10 17 15 16 16 18 17 19 18 18 18 19 17 19 19 18 19
0x00003F20 18 15 15 15 15 13 13 13 14 14 16 14 15 13 14 15
0x00003F30 15 16 17 16 16 17 14 15 13 13 12 12 13 14 13 12
0x00003F40 14 12 13 12 12 11 12 13 0F 0E 0E 0E 0E 0F 0D 0F
0x00003F50 0E 0E 0F 0E 0F 0F 0E 0F 0F 0E 0D 0F 0F 0D 0F 0E
0x00003F60 0F 0F 0F 10 11 10 10 10 10 10 11 12 11 13 14 14
0x00003F70 17 15 16 17 14 13 13 12 12 11 0F 10 0F 0F 10 0F
0x00003F80 0E 11 10 11 12 13 11 12 12 12 12 11 11 0F 0F 10
0x00003F90 0F 11 10 0F 10 12 13 13 13 13 13 13 13 13 0F 10
0x00003FA0 10 0F 0E 11 10 0E 11 10 0F 10 11 12 13 13 13 12
0x00003FB0 12 10 10 0F 0F 11 12 12 11 12 11 0F 0E 10 11 11
0x00003FC0 13 10 0F 0F 0F 0E 0E 0F 0E 0F 0F 0E 0F 0E 0E 10
0x00003FD0 0F 0D 0E 0E 0E 0F 0F 0E 0F 0F 0D 0F 0E 0D 0E 0E
0x00003FE0 0E 0F 0E 0F 0E 0F 0F 0E 10 10 11 12 12 12 13 14
0x00003FF0 14 16 15 17 16 16 16 18 17 1A 1C 1C 1C 1E 1B 1E
0x00004000 1E 1E 1A 1D 1B 1B 1A 1A 19 1A 1A 1A 19 19 18 1A
0x00004010 18 1A 19 18 19 18 18 15 13 13 14 14 13 13 12 13
0x00004020 13 12 13 12 12 11 12 11 11 12 11 10 10 10 10 11
0x00004030 10 10 10 10 10 11 11 11 12 12 12 12 11 13 12 12
0x00004040 12 13 12 12 14 14 14 16 16 18 17 17 16 17 18 17
0x00004050 16 17 16 18 16 17 17 17 16 18 19 18 19 1A 19 1A
0x00004060 19 1A 19 19 19 19 18 18 18 16 16 14 14 14 15 13
0x00004070 14 14 14 15 15 16 16 17 17 18 17 16 16 17 14 14
0x00004080 12 13 13 14 14 14 13 12 12 10 11 12 0E 0F 0F 0F
0x00004090 10 10 0F 0E 0F 0E 0E 0F 0F 0F 0F 0E 0F 0E 0F 0F
0x000040A0 0F 0E 0F 0F 10 0F 0F 0F 10 0F 10 10 10 10 12 10
0x000040B0 13 14 14 15 17 17 18 16 14 13 13 13 12 12 0F 0E
0x000040C0 0F 0F 0F 10 11 12 12 11 12 13 10 12 11 12 12 11
0x000040D0 11 10 10 11 0F 0E 11 11 12 13 13 13 13 14 14 14
0x000040E0 14 13 10 11 10 11 0E 0F 11 11 0F 10 10 10 13 13
0x000040F0 13 12 13 12 10 10 0F 10 11 10 13 13 12 13 10 0E
0x00004100 0E 0F 11 11 12 10 0E 0F 0E 0E 0D 0D 0E 0F 0F 0F
0x00004110 0E 0E 0F 0F 0F 0F 0F 0F 0F 0F 0F 0D 0E 0F 0E 0F
0x00004120 0F 0F 0F 10 0E 0F 0F 0F 0F 0F 0E 0F 0F 0F 0F 10
0x00004130 11 11 13 13 13 14 15 15 16 17 16 19 18 1A 1C 1D
0x00004140 1E 1D 1C 1D 1C 1E 1C 1C 1B 1A 1C 1A 19 19 1A 19
0x00004150 1B 1A 19 19 1A 19 19 19 17 18 16 14 13 13 13 14
0x00004160 14 15 13 13 14 13 12 12 14 13 12 11 12 11 0F 11
0x00004170 11 11 11 10 11 11 10 11 11 10 0F 10 10 10 11 12
0x00004180 11 12 12 13 12 14 13 13 12 13 14 14 17 16 17 17
0x00004190 17 18 18 18 17 17 18 16 16 18 18 18 18 17 19 1A
0x000041A0 18 17 1A 18 1A 1A 1B 1A 1B 1B 1A 1C 1A 1A 17 15
0x000041B0 15 12 13 11 12 12 12 14 15 14 16 17 19 17 18 18
0x000041C0 19 17 16 15 15 13 13 14 13 15 12 14 13 13 12 11
0x000041D0 0F 0E 0F 0E 0F 0F 0E 10 0F 10 0F 0F 0F 10 10 0F
0x000041E0 10 10 0E 0E 0E 10 0F 10 0E 10 11 0F 0F 11 10 10
0x000041F0 11 11 12 12 13 14 14 15 17 17 17 16 15 14 12 13
0x00004200 13 11 11 10 10 0F 10 10 10 10 12 12 11 11 12 12
0x00004210 12 12 11 11 10 0E 10 10 0F 10 10 11 12 13 12 13
0x00004220 13 14 14 14 13 13 11 10 10 10 10 10 0F 0F 0F 11
0x00004230 0F 10 13 13 12 14 12 12 10 10 0E 0F 10 11 13 13
0x00004240 12 11 10 10 11 11 10 12 12 11 0F 0F 0F 0D 0E 0F
0x00004250 0F 0F 0F 0F 0D 0E 0E 0F 0E 0F 0F 0F 0F 0F 0F 0F
0x00004260 0E 0F 0E 0D 0E 0E 0E 10 0F 0F 10 0F 0F 0F 10 0F
0x00004270 10 0F 10 10 11 0F 10 13 12 13 13 16 16 15 17 18
0x00004280 19 19 1D 1C 1D 1D 1D 1C 1C 1D 1E 1B 1C 1C 1A 1B
0x00004290 1B 1B 1A 1B 1A 1A 18 19 19 18 19 19 18 18 16 14
0x000042A0 14 13 13 14 13 15 13 14 14 14 14 13 14 13 13 14
0x000042B0 13 13 13 14 13 12 12 10 11 12 10 12 11 10 10 11
0x000042C0 11 0F 10 11 12 12 12 13 12 12 12 12 11 14 12 16
0x000042D0 16 16 18 18 17 1B 18 18 19 18 17 19 18 18 18 19
0x000042E0 18 1A 1B 19 1A 19 1B 1A 1A 1A 1B 1D 1B 1D 1A 1B
0x000042F0 1B 1B 1A 1A 18 16 12 12 13 13 13 13 13 15 14 16
0x00004300 17 18 18 1A 1A 19 19 18 17 17 15 14 15 14 13 13
0x00004310 14 13 13 12 0E 0E 0F 0F 0F 10 0F 0F 10 0E 0F 0F
0x00004320 0E 10 0F 10 10 10 10 11 10 10 11 0F 10 11 11 0E
0x00004330 0F 11 11 11 11 11 11 12 12 12 14 15 16 16 17 17
0x00004340 15 14 14 13 12 12 11 10 0F 10 0F 11 12 11 11 11
0x00004350 12 11 12 13 12 12 11 11 0F 10 0F 0F 11 0F 11 11
0x00004360 12 13 12 13 14 14 14 13 13 14 12 12 10 0F 0F 0F
0x00004370 0E 0F 10 10 11 12 13 13 14 13 13 11 10 10 0F 0F
0x00004380 11 13 12 11 12 0F 10 10 10 11 11 12 11 10 0D 0F
0x00004390 0E 0E 0E 0E 0F 0D 0E 0E 0F 0E 0E 0F 0E 10 10 0F
0x000043A0 0E 0E 0F 0D 0F 0E 0F 0E 0F 0E 10 0E 0E 0F 0F 0F
0x000043B0 0F 0F 0F 10 10 0F 0F 11 10 12 11 12 12 13 13 14
0x000043C0 15 15 18 18 18 1B 1B 1C 1D 1B 1A 1C 1D 1C 1B 1D
0x000043D0 1C 1C 1B 1A 1A 1A 19 1A 1A 1A 1A 19 18 19 18 18
0x000043E0 18 15 16 13 13 13 13 13 14 14 14 12 14 12 13 13
0x000043F0 13 13 13 13 12 13 14 12 13 12 13 11 12 11 11 11
0x00004400 0F 10 10 0F 11 11 11 11 11 11 10 11 13 12 12 13
0x00004410 11 13 11 14 15 14 15 17 19 19 18 18 1A 19 18 18
0x00004420 19 19 19 19 19 1B 1A 1A 18 1A 1B 1B 1C 1B 1C 1A
0x00004430 1C 1B 1B 1C 1A 1B 1B 1A 18 17 14 14 13 13 13 12
0x00004440 12 14 14 14 14 16 15 19 18 19 19 19 19 1A 17 18
0x00004450 15 15 15 13 13 14 13 12 0F 0F 0E 0F 0F 0E 0F 10
0x00004460 0F 0F 11 0F 10 10 10 10 10 11 0F 11 10 11 11 10
0x00004470 10 10 10 12 10 11 12 10 10 12 11 11 12 12 13 16
0x00004480 16 17 15 16 16 14 14 13 13 13 12 11 0F 0F 11 12
0x00004490 11 12 12 12 11 12 12 12 12 12 11 10 10 0F 0F 0F
0x000044A0 0F 10 10 10 10 11 11 14 13 13 12 14 13 14 13 13
0x000044B0 11 10 11 11 10 10 11 10 10 12 14 14 13 12 12 10
0x000044C0 10 0F 10 10 12 13 13 12 11 0F 10 10 10 11 12 12
0x000044D0 11 10 0E 0F 0F 0F 0E 0F 0F 0E 0E 0D 0E 0F 0F 0F
0x000044E0 0F 0F 10 0E 0F 0F 0F 0E 0F 0F 10 0F 0F 0F 10 10
0x000044F0 10 10 0F 0E 0F 0E 11 12 11 11 11 12 13 12 13 13
0x00004500 15 14 14 15 16 16 15 19 17 18 1B 1A 1B 1C 1A 1C
0x00004510 1C 1C 1C 1C 1B 1B 1C 1B 1B 1C 19 18 19 19 19 19
0x00004520 19 18 18 18 17 16 14 12 13 13 14 13 13 13 13 14
0x00004530 12 15 14 13 13 14 12 13 13 13 13 12 14 12 12 13
0x00004540 12 12 11 11 11 11 12 10 0F 11 11 10 11 10 12 11
0x00004550 11 12 12 13 12 14 13 13 15 16 16 16 18 18 18 18
0x00004560 19 1A 19 18 19 19 1A 19 1A 1A 1A 1B 1A 1B 1A 1C
0x00004570 1C 1B 1A 1B 1B 1B 1D 1C 1C 1B 1D 1B 1A 19 15 16
0x00004580 15 14 14 14 14 15 15 16 16 16 16 16 18 19 1A 19
0x00004590 19 1A 1A 19 1A 18 17 14 14 14 14 13 0E 0E 0F 0F
0x000045A0 10 0E 10 0F 10 11 10 0F 11 10 10 0F 10 12 12 11
0x000045B0 11 12 10 11 12 11 10 12 11 11 11 11 11 12 12 12
0x000045C0 13 13 14 14 16 16 17 16 16 13 14 13 13 11 12 10
0x000045D0 10 11 11 12 12 12 11 12 11 12 13 12 13 11 11 10
0x000045E0 10 11 0F 10 10 10 11 10 12 10 13 14 15 14 14 14
0x000045F0 14 14 13 14 12 10 10 10 0F 11 10 10 11 14 12 13
0x00004600 14 13 12 10 10 0F 10 11 13 13 12 12 11 0F 0E 0F
0x00004610 10 12 12 12 0F 0E 0F 0E 0E 0E 0E 0E 0E 0D 0D 0D
0x00004620 0E 0E 0F 0F 0F 0F 0F 10 0F 0E 0F 0F 0F 0F 10 10
0x00004630 10 0F 11 10 12 11 11 12 12 12 12 13 14 13 14 14
0x00004640 14 15 14 15 16 14 15 16 18 17 17 18 17 18 17 18
0x00004650 1A 1A 1A 1A 1B 1B 1B 1B 1B 1B 1B 1B 19 1A 19 1A
0x00004660 1A 1A 19 19 19 19 1A 19 18 15 13 12 12 13 13 14
0x00004670 14 14 15 13 13 13 13 14 14 14 12 13 13 14 14 14
0x00004680 13 13 14 13 13 14 14 12 11 12 10 11 11 11 11 11
0x00004690 10 11 11 10 10 11 11 13 13 14 13 14 14 16 15 17
0x000046A0 16 18 18 17 19 19 1A 19 19 19 1A 1C 1A 1C 1B 1C
0x000046B0 1A 1B 1B 1B 1B 1C 1B 1C 1D 1C 1C 1D 1B 1B 1A 1D
0x000046C0 1C 1A 15 16 17 18 17 16 15 14 16 17 15 16 16 15
0x000046D0 17 16 18 17 17 1B 1A 1A 19 1A 18 18 16 15 14 13
0x000046E0 0F 10 0F 0E 0F 10 10 10 10 0E 0F 11 12 10 11 11
0x000046F0 10 11 12 12 12 11 11 12 13 13 11 10 13 12 12 11
0x00004700 12 12 12 13 11 13 13 15 16 16 17 16 17 14 14 13
0x00004710 13 14 12 10 10 12 0F 12 13 12 13 13 13 11 13 13
0x00004720 13 12 13 11 12 11 10 10 10 10 10 12 10 10 12 14
0x00004730 15 14 13 14 15 13 14 15 14 12 11 11 10 0E 0F 10
0x00004740 13 13 14 13 12 13 11 10 10 0F 11 11 13 13 11 12
0x00004750 0F 0F 0E 10 12 13 14 11 0F 0F 0F 0F 0D 0D 0F 0E
0x00004760 0E 0E 0D 0E 0E 0F 0F 10 0E 0F 10 10 10 0F 10 0F
0x00004770 10 10 11 0F 11 11 12 12 14 13 13 12 14 14 12 13
0x00004780 14 15 17 15 16 17 16 16 16 18 17 17 18 17 17 17
0x00004790 18 18 15 15 18 18 19 1A 1A 1A 1A 19 1B 1C 1A 1A
0x000047A0 1B 1B 1B 1A 19 1B 1A 19 19 1A 19 19 17 14 13 13
0x000047B0 12 14 13 11 13 13 13 15 14 13 13 14 13 13 13 13
0x000047C0 15 14 13 14 13 12 14 13 14 14 14 13 14 14 13 12
0x000047D0 12 11 12 11 11 10 11 10 11 10 12 12 13 13 13 13
0x000047E0 14 14 16 15 17 17 17 16 18 19 18 1A 1A 19 1A 19
0x000047F0 1B 1C 1B 1D 1A 1C 1D 1D 1C 1A 1D 1C 1D 1E 1F 1C
0x00004800 1C 1E 1C 1C 1C 1C 1A 1A 1C 1B 1A 19 17 16 18 16
0x00004810 16 18 17 17 16 17 16 17 17 15 18 1A 19 18 1B 19
0x00004820 19 18 16 15 0F 0F 0F 0F 10 10 11 10 10 10 10 11
0x00004830 12 12 11 11 11 12 12 12 10 11 12 12 13 13 13 12
0x00004840 12 13 13 13 12 13 14 12 11 13 14 16 14 16 15 16
0x00004850 16 16 15 13 15 15 13 12 11 11 12 12 13 13 13 12
0x00004860 14 13 13 13 12 13 12 12 11 10 11 10 11 11 11 11
0x00004870 11 11 11 13 13 15 14 15 15 15 15 13 15 13 12 10
0x00004880 0F 10 11 12 15 13 14 14 13 12 12 11 10 10 12 13
0x00004890 13 14 12 12 11 10 10 13 13 13 13 0F 0F 0E 0D 0D
0x000048A0 0E 0E 0E 0E 0E 0E 0E 0E 0F 0F 0F 0F 10 0F 11 10
0x000048B0 0F 12 11 12 12 12 12 12 13 15 14 15 15 15 15 16
0x000048C0 16 17 16 17 16 16 17 15 16 18 18 18 18 16 18 16
0x000048D0 18 18 18 18 18 18 17 18 17 18 18 16 18 1A 1A 1B
0x000048E0 19 1A 1A 1A 1B 18 1A 1A 19 1A 19 19 1A 1A 19 17
0x000048F0 16 16 13 14 13 13 13 14 14 12 13 14 13 14 14 14
0x00004900 14 13 15 14 15 13 14 14 14 15 14 12 15 14 14 14
0x00004910 14 14 15 16 14 14 13 14 12 12 12 0F 12 11 11 10
0x00004920 12 12 13 14 14 14 15 15 15 17 17 16 17 17 19 18
0x00004930 17 19 19 1A 1B 1B 1C 1C 1C 1B 1F 1D 1C 1D 1C 1D
0x00004940 1E 1C 1E 1E 1C 1E 1E 1D 1C 1D 1C 1D 1D 1C 1D 1C
0x00004950 1C 18 18 17 18 17 16 18 18 16 16 17 18 16 18 18
0x00004960 19 1A 1A 1A 19 19 19 17 0E 0F 10 10 10 11 10 10
0x00004970 11 10 11 10 12 11 11 11 12 12 10 12 12 12 13 14
0x00004980 13 13 14 13 13 14 14 15 13 15 14 14 15 13 15 15
0x00004990 14 15 15 15 14 15 14 13 15 15 15 13 11 11 12 12
0x000049A0 12 12 13 12 13 12 13 14 14 12 13 12 13 12 12 11
0x000049B0 11 12 11 12 11 12 12 11 12 14 15 15 16 15 15 16
0x000049C0 15 15 12 11 10 10 12 14 13 16 14 15 14 13 11 11
0x000049D0 11 11 13 15 15 14 12 11 10 11 11 13 13 14 12 0F
0x000049E0 10 10 0F 0F 0F 0E 10 10 0E 0F 0F 0F 11 11 11 12
0x000049F0 12 12 13 14 13 12 14 15 14 15 16 17 15 16 16 17
0x00004A00 17 16 18 19 1A 18 18 19 19 18 18 19 19 19 17 19
0x00004A10 19 1A 19 18 18 19 18 18 18 19 18 19 19 18 19 18
0x00004A20 18 17 18 19 19 19 19 1A 19 1A 1A 19 19 1B 1A 19
0x00004A30 1A 1A 19 17 17 14 13 13 15 14 13 15 14 15 14 14
0x00004A40 12 13 15 14 13 14 14 14 15 14 15 15 15 16 16 13
0x00004A50 15 14 16 16 16 16 16 16 16 17 15 16 15 15 13 13
0x00004A60 13 13 12 11 12 14 14 13 13 13 15 16 17 16 17 17
0x00004A70 18 18 17 18 16 18 1A 1A 1A 1A 1C 1C 1E 1D 1E 1E
0x00004A80 1D 1E 1E 1E 1F 1E 1E 1E 1D 1E 1E 1D 1D 1E 1D 1F
0x00004A90 1E 1D 1D 1D 1D 1C 1A 18 18 17 18 18 18 16 17 18
0x00004AA0 18 19 18 17 17 18 19 17 19 18 1A 19 0F 0F 10 10
0x00004AB0 10 11 11 11 10 11 12 12 11 11 11 10 12 13 13 12
0x00004AC0 13 12 12 13 14 14 13 13 14 14 15 14 15 14 15 15
0x00004AD0 16 16 16 14 16 16 16 14 15 13 14 14 14 14 16 12
0x00004AE0 11 11 12 12 13 13 12 13 13 12 14 13 14 14 13 13
0x00004AF0 13 14 12 11 12 12 10 10 11 12 12 13 13 13 15 15
0x00004B00 16 16 16 16 15 16 15 13 11 12 14 16 16 16 14 16
0x00004B10 14 13 13 11 12 14 12 14 15 15 14 13 13 13 12 14
0x00004B20 16 14 13 12 12 12 12 11 11 12 11 13 12 12 13 14
0x00004B30 13 14 13 14 16 18 17 18 18 18 17 1A 1A 1A 1A 19
0x00004B40 1B 1B 1A 1A 1B 1A 1C 1C 1B 1C 1B 1A 1C 1B 1B 1B
0x00004B50 1B 1B 1A 1A 1A 19 1C 1B 1A 1A 1B 1A 1B 1A 19 1A
0x00004B60 1B 19 1A 1A 18 18 1A 1B 19 1B 18 1A 19 1B 1B 19
0x00004B70 1B 1C 1B 1B 1B 1A 1A 18 17 15 15 15 15 15 15 14
0x00004B80 14 14 15 14 14 13 14 14 13 15 15 15 15 16 13 16
0x00004B90 16 16 14 16 16 17 17 16 17 17 16 18 18 18 17 18
0x00004BA0 17 17 16 15 13 14 13 13 15 14 14 15 15 14 14 16
0x00004BB0 13 16 17 18 17 17 17 15 16 16 17 17 18 1A 1B 1C
0x00004BC0 1C 1E 1E 1E 20 1E 1E 1D 1E 1E 1F 1F 1E 1C 1E 1F
0x00004BD0 1E 1D 1F 1F 1F 1F 1F 1E 1D 1C 1D 1B 1C 18 18 18
0x00004BE0 18 18 19 17 17 19 1A 1A 1A 18 19 1A 18 19 1A 18
0x00004BF0 0F 0F 0F 10 10 10 10 11 12 11 11 10 11 11 11 11
0x00004C00 12 10 12 12 13 12 13 12 12 14 14 13 13 13 15 14
0x00004C10 15 15 15 16 16 17 16 15 17 16 15 15 16 15 13 16
0x00004C20 15 13 15 13 13 12 11 11 13 12 13 13 13 14 12 13
0x00004C30 12 13 14 14 13 14 14 13 11 12 11 11 12 13 13 11
0x00004C40 12 14 16 18 17 17 18 17 18 17 17 15 14 13 15 18
0x00004C50 19 19 18 16 16 14 15 14 14 17 19 18 18 17 17 16
0x00004C60 15 16 18 19 19 18 16 16 16 15 16 15 16 16 16 16
0x00004C70 16 17 18 18 18 1A 1B 1C 1D 1C 1D 1E 1E 1E 1E 1F
0x00004C80 1E 1E 1C 1E 1F 1E 1F 1C 1E 1E 1F 20 20 1F 21 21
0x00004C90 1E 1E 1F 1E 1F 20 1E 1E 20 1E 1D 1E 1C 1E 1D 1E
0x00004CA0 1F 1E 1F 1D 1E 1F 1D 1D 1D 1C 1B 1C 1C 1C 1B 1C
0x00004CB0 1C 1E 1C 1D 1C 1D 1C 1E 1D 1B 1B 1A 17 18 16 16
0x00004CC0 15 16 16 16 16 17 15 18 15 15 16 14 14 15 14 15
0x00004CD0 15 16 14 16 16 18 16 16 18 17 16 18 18 17 18 1A
0x00004CE0 1A 19 19 19 17 1A 19 19 16 16 16 16 16 16 17 17
0x00004CF0 15 15 15 15 15 12 13 16 14 15 16 17 16 15 14 16
0x00004D00 17 18 16 1A 1B 1D 1C 1E 1D 1D 1E 1E 1E 20 20 1F
0x00004D10 20 1F 1F 1F 1F 1F 1F 1E 1F 1E 1E 1E 1D 1E 1F 1E
0x00004D20 1D 1B 18 18 17 17 18 18 18 17 1B 1A 1A 1B 19 1A
0x00004D30 1A 1A 18 19 11 0F 10 10 11 10 10 12 11 11 11 12
0x00004D40 10 10 12 12 12 12 12 13 12 13 13 14 14 15 14 14
0x00004D50 14 15 15 15 14 15 14 16 16 17 17 17 16 16 16 15
0x00004D60 17 17 18 17 16 14 15 14 14 14 14 13 13 13 14 13
0x00004D70 13 13 14 12 12 13 14 13 14 15 13 13 12 10 12 12
0x00004D80 13 14 14 15 15 16 19 1A 1A 1B 1C 1C 1B 1B 1D 1B
0x00004D90 1B 1B 1C 1C 1E 1E 1E 1D 1C 1B 1B 1B 1D 1C 1E 20
0x00004DA0 22 1D 1E 1B 1D 1F 21 22 22 21 1E 1C 1F 1C 1D 1D
0x00004DB0 1D 1E 1E 20 21 20 21 21 23 24 23 25 27 27 28 28
0x00004DC0 27 27 27 25 27 26 25 25 25 25 27 24 24 26 28 26
0x00004DD0 26 26 28 27 26 26 29 27 25 25 24 26 24 24 23 23
0x00004DE0 25 25 25 26 25 23 23 25 25 24 24 22 24 23 22 21
0x00004DF0 22 23 21 22 21 21 23 22 22 21 22 21 22 20 21 1F
0x00004E00 1D 1C 1A 19 1B 1C 1A 1A 1B 1B 1B 19 19 19 19 1A
0x00004E10 18 18 19 19 19 18 18 17 18 19 17 19 19 19 19 1A
0x00004E20 1A 1A 1C 1B 1B 1C 1C 1C 1B 1B 1B 1D 1D 1C 1B 1B
0x00004E30 19 17 19 19 1A 1A 17 18 17 15 16 17 15 16 17 17
0x00004E40 17 14 16 14 16 17 18 18 18 1A 1C 1E 1E 1F 1F 1E
0x00004E50 20 1E 20 1E 20 1F 20 1D 1F 20 1E 1E 20 1F 1F 21
0x00004E60 1E 1E 1F 1F 1F 1C 1C 1A 19 18 19 18 18 19 1A 19
0x00004E70 1B 1C 1B 1A 1B 1A 1B 18 11 10 10 10 11 11 10 11
0x00004E80 12 12 13 12 12 12 11 13 12 12 12 12 12 14 13 14
0x00004E90 13 13 15 14 14 15 14 15 14 16 15 16 16 17 17 17
0x00004EA0 17 16 17 18 17 18 17 17 18 17 15 16 17 16 16 14
0x00004EB0 15 13 15 14 15 13 14 13 15 13 14 15 16 14 16 14
0x00004EC0 12 13 13 13 15 17 19 1A 1B 1E 1E 20 22 24 24 25
0x00004ED0 25 26 24 25 24 25 24 27 27 25 27 27 26 26 25 26
0x00004EE0 27 28 2B 2A 28 26 26 26 25 28 2A 29 29 28 29 29
0x00004EF0 26 27 27 26 26 26 27 25 27 28 2A 2B 2B 2C 2C 2B
0x00004F00 2E 2D 2C 2F 2F 30 2F 2D 2D 2C 2A 2B 2C 2A 2B 2C
0x00004F10 2B 2C 2E 2D 2D 2C 2D 2E 2A 2D 2B 2B 2D 2B 2C 2B
0x00004F20 2B 2A 28 29 28 2B 29 2B 2B 2B 2A 2A 2A 2B 29 29
0x00004F30 2A 29 29 28 27 26 28 26 25 27 27 27 28 27 28 27
0x00004F40 29 27 26 23 21 23 23 21 1F 1F 20 21 1F 21 20 1F
0x00004F50 1F 1F 1D 1E 1E 1D 1C 1C 1D 1D 1D 1C 1C 1C 1D 1C
0x00004F60 1D 1C 1C 1E 1F 1F 1E 21 1F 21 1F 1E 21 1F 20 20
0x00004F70 21 20 20 20 1C 1E 1C 1C 1B 1A 1A 1B 1C 19 18 17
0x00004F80 17 15 16 18 16 17 15 15 17 16 16 17 18 17 18 1C
0x00004F90 1C 1E 1D 20 1E 20 21 20 20 21 20 20 20 1D 20 21
0x00004FA0 20 1F 1D 20 1F 1F 1E 1F 1D 1F 1E 1E 1B 19 19 18
0x00004FB0 18 18 19 1A 19 1C 1D 1B 1C 1B 1C 1A 0F 10 10 11
0x00004FC0 11 11 13 12 13 11 12 13 12 13 12 11 14 13 13 13
0x00004FD0 13 14 13 13 13 13 14 14 14 14 15 16 15 16 16 17
0x00004FE0 17 17 17 18 17 17 16 16 19 18 18 19 19 19 16 17
0x00004FF0 18 18 17 17 16 17 16 16 14 14 14 14 14 14 14 15
0x00005000 15 15 15 15 13 14 14 17 18 1C 22 23 23 26 27 2A
0x00005010 2D 2E 2F 2F 2F 2F 2E 2E 31 31 30 32 34 34 33 34
0x00005020 33 34 33 37 38 35 37 36 33 30 2C 2E 2F 30 32 31
0x00005030 32 32 33 31 31 30 31 2D 2F 2E 2B 2D 2D 2E 30 31
0x00005040 34 34 33 36 35 37 39 36 3B 38 36 38 33 32 2F 31
0x00005050 30 30 2F 32 33 32 35 38 32 34 34 34 34 34 34 34
0x00005060 33 32 2F 2F 2E 2F 30 30 30 32 31 30 32 33 32 31
0x00005070 2F 30 31 32 31 30 2F 2D 2C 2C 2B 2C 2D 2B 2C 2D
0x00005080 2C 2C 2D 2D 2D 2A 2B 29 28 27 26 25 27 25 25 24
0x00005090 23 25 25 23 24 23 24 23 23 23 22 22 23 23 22 23
0x000050A0 21 22 21 21 22 21 22 21 24 24 23 24 25 27 26 26
0x000050B0 26 26 25 26 25 26 25 23 24 22 22 20 21 1E 1D 1D
0x000050C0 1F 1D 1D 1C 19 19 18 18 17 17 15 17 18 17 18 17
0x000050D0 17 18 17 18 1A 19 1B 1C 1F 1F 20 21 20 1F 21 22
0x000050E0 20 1F 20 20 20 21 1F 1F 20 1E 20 1F 21 20 1E 1F
0x000050F0 1E 1C 1B 18 19 17 19 18 18 1A 1B 1D 1C 1C 1D 1C
0x00005100 11 10 12 10 10 11 12 12 13 12 12 13 12 13 12 14
0x00005110 14 13 13 13 14 13 12 13 13 14 15 16 15 15 16 16
0x00005120 16 15 16 18 18 17 18 18 16 18 19 17 18 19 17 19
0x00005130 1A 18 19 18 19 18 18 18 1A 19 17 18 17 17 17 16
0x00005140 15 13 15 17 15 16 16 16 16 16 17 17 1F 24 28 2B
0x00005150 2E 32 33 34 39 3A 3B 3C 3D 3C 3D 3C 3F 3B 3E 3D
0x00005160 43 40 41 3F 40 40 43 44 41 44 44 41 41 3A 39 3B
0x00005170 3E 3C 41 41 43 41 44 43 43 42 3D 38 34 33 32 31
0x00005180 31 34 35 38 3E 40 41 44 41 41 41 44 46 47 45 41
0x00005190 3B 39 36 38 34 36 34 38 38 3C 3E 3E 3E 3E 3D 40
0x000051A0 3F 3E 3C 3C 3C 3A 39 35 34 33 32 33 33 35 3C 3C
0x000051B0 3C 3A 3A 3A 37 3C 3A 38 39 39 35 32 32 31 31 30
0x000051C0 32 33 34 35 32 34 33 33 33 30 30 30 2C 2B 2D 2C
0x000051D0 2D 2A 29 28 28 2A 28 29 28 28 28 28 27 27 27 28
0x000051E0 27 26 26 26 25 26 24 25 24 26 26 25 27 27 29 29
0x000051F0 29 28 28 29 28 2A 2A 28 29 27 29 28 28 29 26 25
0x00005200 26 25 25 25 23 21 21 21 20 1E 1D 1D 1A 19 1A 19
0x00005210 17 19 19 19 1A 19 19 18 18 1A 1A 1C 1C 1D 1E 20
0x00005220 1F 22 20 21 21 22 1F 21 21 21 21 20 21 1E 20 20
0x00005230 1F 21 20 20 1F 1D 1D 1A 19 18 19 19 18 19 19 1B
0x00005240 1C 1D 1E 1C 11 10 11 12 11 12 11 12 12 12 13 12
0x00005250 12 14 13 13 14 14 14 15 14 13 15 14 14 14 14 16
0x00005260 14 15 16 16 16 16 17 17 17 18 18 19 17 18 19 18
0x00005270 1A 1A 19 18 19 1A 1B 1C 1A 1A 19 19 19 1A 1A 1A
0x00005280 19 19 17 17 18 16 17 15 17 17 16 17 16 1A 1A 20
0x00005290 26 2C 31 35 38 3D 3F 42 43 46 49 47 4A 49 4C 4C
0x000052A0 4B 4B 4C 4B 4C 4F 4F 4C 4D 4D 50 50 4E 51 53 4E
0x000052B0 4B 44 44 4B 52 56 56 54 56 59 5A 60 5B 58 4F 46
0x000052C0 3C 38 38 35 37 38 3B 44 4C 53 50 52 4E 4F 52 53
0x000052D0 55 56 56 4E 47 40 3D 3B 39 3B 3B 3C 41 44 4A 49
0x000052E0 47 44 46 45 48 49 49 4B 46 42 3E 3A 39 37 38 38
0x000052F0 3A 3D 43 44 45 47 45 43 46 44 46 45 44 42 3F 3C
0x00005300 36 36 35 34 36 37 3B 3E 3E 3D 3E 39 39 39 39 36
0x00005310 35 34 32 31 2F 2C 2C 2B 2C 2C 2F 2E 2D 2C 2E 2D
0x00005320 2E 2C 2C 2A 2E 2B 2B 28 29 2B 28 29 28 26 2B 2B
0x00005330 2A 2A 2C 2B 2C 2B 2C 2A 2B 2A 2C 2B 2A 2A 2B 28
0x00005340 2A 29 28 2A 28 2A 2A 27 26 25 24 25 23 24 24 23
0x00005350 23 1F 1E 1E 1E 1F 1E 1D 1E 1B 1B 1B 1C 19 1A 1A
0x00005360 1D 1C 1D 1F 20 21 21 1F 20 21 21 22 23 22 20 20
0x00005370 20 21 22 21 21 21 20 20 1F 1F 1F 1E 1B 1A 18 19
0x00005380 18 19 1A 19 1D 1C 1C 1E 10 11 11 12 11 11 10 12
0x00005390 12 12 12 13 14 13 13 14 13 14 14 14 16 12 16 15
0x000053A0 15 15 16 16 15 15 15 16 15 17 17 16 18 17 18 17
0x000053B0 18 19 19 1A 1A 1A 18 19 1A 1A 1C 1B 1B 1B 1B 1C
0x000053C0 1A 1B 1B 19 1A 19 1B 1B 19 1A 19 18 19 18 18 1A
0x000053D0 1A 1D 21 28 2D 34 3C 3F 43 46 48 4A 4B 4E 52 52
0x000053E0 55 59 57 58 59 57 59 58 57 58 57 56 55 58 58 58
0x000053F0 5B 5D 5B 58 52 50 54 5F 65 6B 6A 68 6A 6B 72 79
0x00005400 7E 75 64 51 45 3B 38 39 3C 3D 43 4C 57 61 5F 5B
0x00005410 5A 52 55 59 62 6A 66 61 54 48 41 3C 3C 3B 3E 42
0x00005420 47 4D 4F 4F 50 4E 4C 4A 4B 4F 53 54 51 4C 45 3E
0x00005430 3B 3A 3A 3B 40 44 48 50 4E 4B 4B 48 4A 4C 4C 50
0x00005440 4E 4B 47 41 3B 39 38 39 39 3C 40 46 47 46 45 42
0x00005450 41 3F 43 3E 3E 3E 39 39 33 2F 2F 2E 2F 30 33 36
0x00005460 38 34 34 33 34 34 33 34 33 32 31 2F 2F 2C 2D 2A
0x00005470 2B 2B 2E 2E 30 2E 2F 2F 2F 2E 2E 2E 2D 2D 2B 2C
0x00005480 2D 2B 29 2B 2C 2B 29 29 2D 29 2A 2A 28 28 25 26
0x00005490 24 26 25 25 26 25 24 23 20 22 21 21 20 1F 21 20
0x000054A0 1E 1E 1E 1D 1D 1D 1F 1D 21 21 21 24 21 24 21 25
0x000054B0 23 23 23 23 21 23 23 23 22 23 21 21 22 21 1F 1E
0x000054C0 1E 1B 1B 19 19 19 19 19 1A 1B 1C 1B 11 10 11 11
0x000054D0 11 10 11 11 12 13 12 11 12 14 13 14 13 14 13 13
0x000054E0 15 13 15 16 15 15 14 15 14 17 15 17 16 16 18 18
0x000054F0 16 17 19 18 19 19 19 19 1C 1A 19 1B 1B 19 1A 1A
0x00005500 1C 1C 1B 1C 1B 1B 1B 1C 1A 1D 1C 1C 1B 1B 1A 1B
0x00005510 19 1B 1C 1D 20 25 2C 2F 36 3E 40 46 47 4B 4F 4F
0x00005520 53 50 53 57 59 5A 5C 5E 62 62 62 64 61 64 64 61
0x00005530 60 63 62 62 64 63 62 5F 59 58 5E 6C 78 7B 73 6B
0x00005540 6E 73 80 8C 93 8F 79 63 4B 42 3C 3A 3B 40 49 54
0x00005550 62 67 66 62 5A 55 57 5E 6A 73 7B 70 5F 4E 43 3D
0x00005560 3D 3C 41 45 4B 54 59 54 54 4D 49 4A 49 4D 55 59
0x00005570 59 54 4B 41 3C 3B 3B 3F 43 46 4E 51 55 51 4D 46
0x00005580 4B 4A 4E 51 56 51 4B 46 3E 3B 3A 37 3C 3F 46 49
0x00005590 4C 4D 48 45 45 42 3E 44 46 45 42 3C 35 33 32 32
0x000055A0 32 31 35 3C 3D 3C 3C 39 3A 38 3A 3A 3B 39 3A 33
0x000055B0 31 30 2E 2E 2F 30 32 37 36 39 35 35 32 33 31 34
0x000055C0 32 31 2F 2E 2E 2B 2B 2C 2D 2B 2E 2C 2C 2C 2C 2C
0x000055D0 2A 2A 2B 29 27 26 28 26 26 27 24 26 25 24 23 24
0x000055E0 23 21 22 24 20 21 20 20 21 21 1F 20 1F 20 22 22
0x000055F0 21 24 26 24 24 25 23 23 23 23 24 23 23 22 23 22
0x00005600 22 21 21 1E 21 1F 1C 1C 1A 18 1A 19 18 19 19 1D
0x00005610 12 10 12 12 12 11 12 11 12 13 13 11 12 14 13 15
0x00005620 14 14 14 14 14 14 15 14 15 15 15 15 16 17 16 17
0x00005630 17 18 17 17 18 17 19 18 18 17 1A 19 1B 1B 1C 1A
0x00005640 1B 1C 1B 1B 1B 1C 1B 1C 1C 1D 1D 1D 1D 1E 1E 1C
0x00005650 1E 1D 1F 1E 1D 1F 22 25 2A 2D 34 3D 3F 43 47 4B
0x00005660 4D 4D 4F 4E 4D 50 50 51 50 59 5D 60 60 66 6B 6C
0x00005670 69 6C 6B 68 68 68 64 65 65 66 66 65 5F 5F 6A 7A
0x00005680 85 82 74 69 66 6B 7A 8B 9B 9D 8D 6E 54 44 3D 3D
0x00005690 3F 43 4D 57 65 6A 69 5B 53 4C 4E 59 69 7B 82 7E
0x000056A0 6A 58 48 3E 3B 3D 42 46 4F 5A 5C 5B 50 48 46 40
0x000056B0 45 4C 56 5F 5C 59 4D 43 3F 3E 3E 3F 46 4B 53 55
0x000056C0 55 4F 48 44 43 47 49 4E 56 55 4F 49 3E 3A 3A 3C
0x000056D0 3D 42 47 51 53 4F 46 43 3F 3E 41 44 46 4A 47 40
0x000056E0 3B 35 33 33 34 37 3A 3E 43 43 3F 3B 38 3C 3C 3F
0x000056F0 42 42 3D 39 36 30 31 2E 32 32 38 39 3C 3A 3D 39
0x00005700 38 38 38 38 3A 33 33 31 30 2F 2E 2E 2D 2E 32 32
0x00005710 32 30 2E 2E 2E 2E 2D 2D 2B 29 2A 28 26 28 27 28
0x00005720 28 27 27 27 27 25 26 25 25 25 24 22 23 22 21 22
0x00005730 23 22 23 22 24 23 26 26 24 25 26 26 25 26 25 25
0x00005740 25 24 24 23 23 23 23 22 21 20 21 1E 1C 1B 19 19
0x00005750 19 1A 19 1B 12 12 12 12 11 12 12 11 13 12 14 12
0x00005760 14 14 14 13 15 15 15 13 15 14 14 16 14 16 16 16
0x00005770 17 17 17 17 16 16 18 19 18 18 18 1A 19 18 1A 19
0x00005780 1C 1A 1C 1A 1B 1A 1B 1B 1C 1D 1D 1C 1E 1D 1C 1C
0x00005790 1F 1E 1C 1C 1D 1E 1F 1F 20 23 28 2B 30 36 3C 41
0x000057A0 48 47 4C 4A 49 47 46 43 44 45 45 45 49 4C 52 57
0x000057B0 60 62 6A 71 74 72 73 72 6F 6E 6B 69 67 69 6B 67
0x000057C0 63 65 71 83 87 7E 6C 5E 5B 5E 6A 7E 99 9E 92 77
0x000057D0 5B 46 40 3F 41 48 50 5C 6A 6F 64 56 4D 43 44 4E
0x000057E0 5E 73 7F 81 72 5D 48 3C 3E 3E 40 49 52 5B 5E 5A
0x000057F0 4E 43 3E 3A 3E 42 4F 5A 5F 5C 52 47 3F 3D 3F 43
0x00005800 46 4F 55 5B 54 4A 45 3F 3C 41 46 4B 52 56 52 4A
0x00005810 43 39 3A 3B 3E 44 49 51 53 4E 45 3F 3A 3B 3C 41
0x00005820 49 4C 4C 46 3E 36 32 33 35 3A 3D 44 43 42 3D 3A
0x00005830 39 39 39 3F 42 44 43 3D 35 30 34 32 32 37 39 40
0x00005840 41 3F 3B 38 3A 39 36 3B 3E 3B 36 32 2E 2E 2D 2F
0x00005850 2F 33 36 38 35 34 32 33 32 32 31 32 32 2D 2A 2A
0x00005860 2B 29 2A 2D 2D 2E 2A 29 29 27 28 27 27 27 26 25
0x00005870 22 24 25 23 24 23 23 24 24 23 25 23 23 25 25 25
0x00005880 26 26 25 28 27 25 25 26 24 24 24 24 23 24 21 21
0x00005890 22 1C 1B 19 19 1A 1A 19 12 12 12 12 12 11 13 12
0x000058A0 13 13 13 13 13 13 12 14 14 15 15 16 15 15 15 15
0x000058B0 16 15 16 16 17 17 17 16 17 19 19 1A 17 1A 18 1A
0x000058C0 18 17 19 1A 1B 1B 1C 1D 1C 1B 1D 1E 1E 1E 1E 1E
0x000058D0 1D 1F 1F 1D 1F 1E 1F 1F 21 21 21 22 23 28 2F 33
0x000058E0 38 3E 42 47 49 49 47 46 3F 3E 3B 38 34 36 36 39
0x000058F0 3C 41 45 4A 53 5B 63 6D 73 7B 77 7A 71 71 6F 6C
0x00005900 6E 6A 6B 68 64 68 71 7F 87 73 5E 53 49 4B 58 6D
0x00005910 88 98 95 7E 5F 49 3F 3E 42 48 52 5F 6C 6D 62 4F
0x00005920 3F 38 38 44 53 69 7B 81 76 63 49 3F 3F 3E 42 4B
0x00005930 54 5E 5F 58 4D 3D 33 2F 39 3D 49 5B 61 5F 55 48
0x00005940 3F 3F 41 45 48 50 58 59 53 45 3D 34 35 36 3F 4A
0x00005950 52 54 52 47 42 3C 3B 3B 41 47 4B 50 51 4B 41 3B
0x00005960 32 34 38 3F 48 4A 4E 49 3F 36 34 34 35 3C 3D 42
0x00005970 44 41 38 38 32 34 3B 3D 44 47 47 43 38 32 2E 30
0x00005980 35 39 3A 3F 40 3D 3C 35 34 35 38 3C 3A 3F 3B 34
0x00005990 31 2D 2F 31 32 34 39 3A 39 34 33 34 34 35 37 38
0x000059A0 33 31 2B 2B 2B 29 2C 2C 2E 32 2F 2F 2B 2E 2D 2B
0x000059B0 29 2B 2A 28 26 27 26 26 26 26 26 23 26 23 23 24
0x000059C0 23 25 26 25 24 26 27 27 27 25 23 24 23 24 24 24
0x000059D0 24 24 23 24 21 22 1F 1E 1B 1C 1C 1B 12 12 11 12
0x000059E0 12 13 12 12 13 13 13 13 13 15 14 16 14 15 14 14
0x000059F0 14 14 15 16 15 16 17 16 16 15 17 17 16 18 18 18
0x00005A00 19 19 1A 18 19 18 1A 1B 1B 1C 1B 1B 1C 1C 1B 1C
0x00005A10 1F 1F 1F 20 1F 1E 1F 1D 1E 1F 1F 21 21 21 23 25
0x00005A20 28 2D 32 3A 40 43 46 46 48 42 42 3A 35 30 2E 2B
0x00005A30 29 2A 2A 2A 2D 30 34 3A 41 4C 56 66 71 73 7E 7B
0x00005A40 78 73 71 70 72 6D 6E 6D 65 69 75 81 80 72 57 41
0x00005A50 38 38 42 59 7A 8C 8E 7D 61 48 40 3F 42 47 53 64
0x00005A60 70 6C 5F 49 3A 2D 2B 31 47 61 74 7F 73 5F 4C 3F
0x00005A70 3E 3D 42 4C 52 5E 63 58 49 36 2C 28 2D 39 48 55
0x00005A80 61 5E 55 4A 42 44 43 46 4B 53 59 57 51 40 34 2C
0x00005A90 2A 2F 36 41 4F 54 53 4B 41 3B 39 3D 3F 46 4A 51
0x00005AA0 4B 45 3C 32 2D 2E 31 3A 46 4A 4D 48 42 38 35 33
0x00005AB0 33 39 3E 44 44 40 3A 33 2E 30 34 3C 43 48 48 44
0x00005AC0 38 31 31 32 34 39 3E 3D 40 3D 34 2E 2F 30 33 37
0x00005AD0 39 3C 3C 35 32 2E 2E 2E 32 36 39 3A 38 34 32 2F
0x00005AE0 31 35 38 36 38 34 2E 2B 2B 2B 2D 2C 31 30 2F 2F
0x00005AF0 2D 2D 2D 2D 2D 2B 2B 2A 27 27 27 27 28 28 27 27
0x00005B00 26 24 25 25 25 26 25 25 26 27 28 28 28 26 25 22
0x00005B10 20 22 21 20 22 22 22 20 20 22 20 21 1D 1C 1E 1B
0x00005B20 12 11 12 13 13 13 13 12 12 13 14 14 14 14 13 14
0x00005B30 14 15 15 13 14 15 16 17 15 16 16 16 17 18 17 18
0x00005B40 18 18 19 18 19 19 17 19 1A 18 1A 1B 19 1B 1B 1C
0x00005B50 1C 1D 1C 1F 1E 1E 1E 1E 20 1F 21 20 21 22 24 23
0x00005B60 23 24 27 2A 2E 34 39 3F 44 47 47 46 43 3B 35 2F
0x00005B70 2A 26 23 23 22 22 20 24 25 25 2A 30 34 3D 48 55
0x00005B80 66 72 7E 80 7C 7A 75 71 6E 71 6E 68 63 6B 78 80
0x00005B90 80 6B 52 38 2E 2D 36 4C 68 80 89 7A 5E 48 43 41
0x00005BA0 44 4A 56 66 72 74 60 48 36 2B 28 2E 3D 59 6F 7C
0x00005BB0 74 61 4E 41 3D 3E 41 49 53 63 64 5C 4C 3A 2E 2A
0x00005BC0 2A 31 45 57 63 5F 56 4C 43 44 44 46 49 53 57 58
0x00005BD0 4D 42 37 2B 28 2A 31 43 4E 56 50 4C 42 3B 39 3B
0x00005BE0 3E 45 4A 4E 4E 46 37 2F 2A 29 2E 3C 46 4C 4D 48
0x00005BF0 41 35 33 32 35 3B 3D 42 43 3E 34 2D 2A 2B 31 39
0x00005C00 40 47 46 44 3F 32 31 32 33 3A 3E 41 3E 3B 32 2C
0x00005C10 2A 2C 2F 35 39 3D 3E 39 33 2F 2E 33 33 35 3B 3B
0x00005C20 33 31 2E 2D 2F 33 33 39 3A 36 31 2B 2B 2D 2D 32
0x00005C30 32 32 33 2F 2E 2A 2D 2E 31 2F 2E 2B 29 26 26 27
0x00005C40 28 27 2A 29 27 27 26 26 27 27 26 27 26 28 2B 2C
0x00005C50 2B 27 23 23 21 20 21 21 20 21 20 1F 22 21 1F 1E
0x00005C60 1E 1E 1E 1D 12 11 12 12 12 12 13 12 14 13 14 14
0x00005C70 15 14 15 16 15 14 15 16 15 16 16 15 17 17 19 18
0x00005C80 17 19 18 19 19 18 18 19 1B 19 19 1A 19 1B 1B 1B
0x00005C90 1C 1D 1C 1C 1D 1F 1F 21 1F 1F 20 21 21 23 22 21
0x00005CA0 25 27 28 2A 2C 2D 30 31 36 3A 3D 43 44 47 43 40
0x00005CB0 3A 31 2A 25 23 1D 1D 1C 1B 1E 1C 1C 1E 1F 23 24
0x00005CC0 2A 2E 3B 46 54 67 74 7D 7C 7E 7A 76 70 72 6F 6A
0x00005CD0 67 6E 7B 90 86 78 54 3C 33 2F 3A 4C 65 7E 84 75
0x00005CE0 5D 49 42 42 43 4B 55 68 79 7A 69 51 3E 2F 2E 35
0x00005CF0 40 58 6C 78 71 60 49 40 3E 3E 42 4B 57 64 66 62
0x00005D00 52 43 39 31 30 38 49 58 61 60 57 4C 45 45 46 48
0x00005D10 4B 54 58 59 54 45 38 30 2D 2C 38 46 51 54 53 4A
0x00005D20 42 3B 3B 3B 3E 46 4B 4D 4A 45 38 31 2A 28 2E 3A
0x00005D30 44 4B 4B 4A 41 36 33 34 35 3C 40 42 40 3E 34 2A
0x00005D40 28 29 2E 3D 43 48 4A 43 3D 33 30 32 34 39 3A 3E
0x00005D50 3F 3B 31 2C 27 28 2D 34 3A 3C 3B 38 32 2C 2D 31
0x00005D60 36 38 39 38 34 31 2B 27 2C 2F 34 37 3A 39 32 2C
0x00005D70 2C 2E 2E 30 34 34 32 2E 2A 29 2A 2C 30 34 31 30
0x00005D80 2A 26 27 28 29 2B 2A 2C 28 28 26 25 27 27 29 2A
0x00005D90 28 28 2C 2B 2B 2A 26 24 22 21 21 21 22 20 22 20
0x00005DA0 21 1F 20 1E 1F 1C 1D 1D 11 12 13 14 13 13 13 14
0x00005DB0 14 14 14 13 14 15 15 15 14 15 15 17 16 16 16 16
0x00005DC0 17 16 18 19 19 19 19 19 19 1A 18 1A 18 1A 1A 1B
0x00005DD0 1A 1A 1C 1C 1C 1E 1F 1E 1F 1F 21 21 20 22 22 24
0x00005DE0 26 27 29 2B 2E 33 33 3A 3C 40 3F 41 42 43 45 46
0x00005DF0 47 45 3D 39 2E 2A 23 1E 1C 1B 1A 19 17 19 19 19
0x00005E00 1B 1E 1F 20 23 29 2F 3C 4A 58 6B 78 7C 7F 7B 76
0x00005E10 79 6E 71 6A 66 73 83 98 99 86 67 4E 41 3E 47 56
0x00005E20 70 82 85 76 5B 4A 43 43 45 4C 5C 6F 82 82 77 5E
0x00005E30 4C 41 3C 3C 4C 5F 6E 75 6E 5E 4A 41 3E 40 43 4B
0x00005E40 5A 65 6D 65 5A 4B 43 3C 3F 41 4E 5B 64 61 57 4F
0x00005E50 45 44 48 4A 4E 57 5C 5E 55 4D 44 38 38 33 3C 4B
0x00005E60 57 59 57 4C 43 3D 3A 3C 3E 44 4B 4E 4F 4A 42 36
0x00005E70 30 2F 33 3C 46 51 4E 48 3F 38 33 36 38 3C 41 42
0x00005E80 41 41 35 2E 2A 2B 31 3D 42 49 48 45 3E 34 33 32
0x00005E90 35 38 3C 3B 3D 39 2F 2A 28 29 2E 34 3A 3C 3D 3A
0x00005EA0 34 30 2F 2F 34 35 37 36 32 2E 28 28 2A 2E 32 39
0x00005EB0 3B 38 32 30 2C 2C 2D 32 33 34 33 2D 27 29 29 2D
0x00005EC0 31 32 33 2F 2C 29 28 27 29 2B 2B 2B 27 26 25 27
0x00005ED0 26 28 2A 29 2A 2C 2F 2E 2E 2A 28 26 23 21 21 22
0x00005EE0 22 21 21 20 20 20 1F 21 21 1E 21 1C 13 12 13 11
0x00005EF0 13 12 12 14 12 14 14 14 16 15 14 15 16 16 15 16
0x00005F00 16 17 17 17 18 19 18 18 1A 19 1A 19 1B 1A 1A 1A
0x00005F10 1A 1A 1C 1C 1D 1D 1D 1E 1D 1F 20 20 22 23 24 21
0x00005F20 22 24 26 28 2C 32 38 3A 41 47 49 4C 50 54 51 4D
0x00005F30 4B 49 49 48 46 41 3B 2E 28 22 1D 1A 18 19 17 18
0x00005F40 17 19 1A 1B 1D 1C 1E 1F 22 25 2A 32 3C 4F 5E 71
0x00005F50 79 80 7D 7D 76 75 71 6D 6A 74 8B 9D A3 9B 7A 61
0x00005F60 55 51 59 67 7A 7E 7F 70 5D 49 42 41 46 4C 59 6E
0x00005F70 83 8A 7F 6B 5B 4E 4B 4C 55 63 6B 6F 6A 59 4B 3E
0x00005F80 3F 40 43 4E 57 64 6C 6B 62 56 4F 4A 48 4B 58 60
0x00005F90 61 5E 57 4B 48 48 48 47 4D 54 5A 5B 5C 54 49 42
0x00005FA0 41 3F 47 50 5A 59 57 4B 45 3C 3B 3E 3F 46 4A 52
0x00005FB0 53 4D 47 3E 3A 38 3B 41 4E 4E 4E 46 3D 39 33 34
0x00005FC0 38 3C 3F 42 45 44 3C 36 34 31 38 41 47 4A 48 44
0x00005FD0 3C 34 33 31 35 38 3D 40 3D 3C 36 2E 2A 2B 2F 35
0x00005FE0 3C 3E 3D 3B 32 30 2E 32 31 35 37 37 34 2E 2B 27
0x00005FF0 29 2D 35 36 38 39 35 2F 2C 2D 2F 32 34 33 31 2B
0x00006000 28 26 27 2D 2E 33 32 2D 2D 2A 28 29 29 2A 2D 2B
0x00006010 28 25 25 26 28 28 2B 2B 2C 2E 31 30 2F 2D 27 25
0x00006020 22 22 22 24 23 24 24 21 21 21 21 22 20 21 1F 1E
0x00006030 13 12 13 12 13 14 14 14 14 14 14 15 15 15 16 16
0x00006040 15 16 15 16 17 18 16 17 17 18 19 1B 19 1A 1A 1A
0x00006050 1A 1A 1A 1A 1A 1B 1C 1D 1D 1D 1E 1F 21 22 20 22
0x00006060 23 24 27 26 29 2D 30 37 3E 45 48 4E 54 56 5E 5D
0x00006070 5E 5D 59 52 4F 4E 48 49 43 3A 31 27 23 1C 1A 19
0x00006080 18 17 17 17 17 18 1B 1B 1E 1F 21 21 22 23 27 2C
0x00006090 35 42 52 62 73 80 7E 7C 79 76 73 6A 69 70 82 93
0x000060A0 9F 9C 85 70 64 61 66 6B 76 7D 7B 6C 59 47 43 45
0x000060B0 47 4D 5A 6A 7A 84 7F 6E 5F 56 53 56 5B 65 6D 6F
0x000060C0 63 54 46 42 41 42 42 4A 53 5F 68 67 60 5C 5A 53
0x000060D0 51 55 55 5E 5F 5A 52 49 46 46 45 49 4B 50 59 5C
0x000060E0 58 57 4B 4B 47 48 50 55 59 5A 52 4C 42 3D 3C 3A
0x000060F0 40 45 4C 53 53 4C 46 43 3C 3D 41 47 4A 4E 4F 45
0x00006100 3F 36 33 34 36 3C 42 47 46 46 40 3D 38 39 3E 46
0x00006110 4A 4B 48 43 3C 35 32 32 33 3A 3B 40 43 41 39 33
0x00006120 34 32 35 3D 3F 3D 41 3A 34 31 30 2F 34 36 3B 3A
0x00006130 38 35 2D 2B 2B 30 35 3B 3B 38 35 2E 2B 2B 31 2F
0x00006140 32 36 32 2A 27 28 27 2B 2E 31 32 32 2C 2A 27 28
0x00006150 29 29 2B 29 27 23 23 22 28 29 2A 2B 2C 2F 2D 31
0x00006160 31 2C 2A 27 23 20 20 22 23 24 25 24 22 22 22 1F
0x00006170 20 21 21 1F 11 13 13 12 12 14 14 14 15 13 14 14
0x00006180 15 14 15 16 16 14 16 16 17 16 17 18 19 19 1A 1A
0x00006190 1B 1A 1B 1B 1B 1A 1B 1B 1B 1B 1D 1D 1F 1F 1F 23
0x000061A0 24 22 27 28 2B 2C 30 34 37 3E 43 4A 51 55 5C 5E
0x000061B0 5C 62 62 67 64 64 59 54 4F 4A 4B 47 3F 34 2A 23
0x000061C0 1D 1A 18 17 16 17 17 18 1A 1C 1F 20 22 23 24 26
0x000061D0 25 27 27 2B 31 3B 4A 59 6B 74 7D 7F 7B 76 71 6D
0x000061E0 6C 6F 7C 8C 92 91 87 76 6C 69 69 6E 77 7B 73 66
0x000061F0 54 47 43 45 45 48 53 63 71 76 74 68 60 58 55 59
0x00006200 5C 62 66 61 5B 51 49 42 43 43 45 4A 50 5B 61 63
0x00006210 5D 5C 59 57 56 58 58 5C 59 56 4C 49 48 47 47 45
0x00006220 48 4C 53 57 59 53 4F 4B 4B 4C 4F 53 57 54 4F 45
0x00006230 41 3E 3C 3E 41 46 4B 4E 50 4D 49 44 3F 40 43 46
0x00006240 49 4D 49 44 3A 36 36 33 39 3C 42 43 45 45 42 3C
0x00006250 3B 3F 41 45 49 4B 47 42 39 35 32 33 34 3A 3B 41
0x00006260 43 42 41 3C 39 3A 3D 3E 3E 42 3C 3A 33 31 32 31
0x00006270 33 38 3B 3B 38 33 33 30 30 31 38 3B 3B 39 34 2F
0x00006280 2C 2C 31 31 33 32 33 2D 2B 29 28 2B 2F 33 34 32
0x00006290 2F 2A 28 28 29 29 2A 2A 27 23 23 22 26 28 2B 2C
0x000062A0 29 2C 2E 32 31 2B 29 25 21 20 20 20 23 26 27 24
0x000062B0 21 23 21 20 21 23 22 1E 13 12 13 12 13 13 14 14
0x000062C0 15 14 14 15 15 14 16 14 17 16 15 16 17 18 18 17
0x000062D0 19 1A 1B 1A 1B 1A 1B 1B 1B 1C 1B 1C 1D 1E 1E 1F
0x000062E0 22 23 25 27 2A 2B 2F 32 38 3C 3F 44 48 4E 58 5A
0x000062F0 5C 5C 65 63 66 65 67 68 65 62 5C 53 51 4E 4B 45
0x00006300 3A 2E 24 1F 19 17 18 16 18 18 1A 1C 1E 21 23 27
0x00006310 27 27 28 29 2A 2A 2B 2D 30 3A 44 50 62 6E 7B 7C
0x00006320 7E 75 75 6E 6A 6B 74 83 89 8C 85 78 6E 6D 6C 6F
0x00006330 75 71 6B 5D 50 47 43 46 44 4B 51 58 68 6B 6A 64
0x00006340 5D 59 5A 57 58 5B 5E 5A 56 4D 47 45 45 42 46 4A
0x00006350 4D 52 58 59 57 56 5A 57 57 53 53 53 51 4D 4C 47
0x00006360 45 47 45 45 48 49 4E 53 54 51 4E 4B 4C 4C 4E 54
0x00006370 53 52 4C 46 42 3E 3C 40 41 43 48 4A 4C 48 46 40
0x00006380 41 43 42 47 47 47 41 3E 36 35 36 34 39 3C 41 44
0x00006390 47 44 40 3E 3D 3D 3F 43 46 45 40 3C 38 32 30 34
0x000063A0 34 3A 3F 42 43 43 3F 3A 3C 3D 3E 3F 41 41 3C 35
0x000063B0 32 32 30 31 37 38 3B 3C 3D 35 35 34 34 38 3B 3C
0x000063C0 3C 38 34 2E 2D 2D 2D 30 31 32 36 31 2C 2D 2D 2D
0x000063D0 30 33 36 30 2B 28 28 27 28 29 2A 2B 27 23 25 22
0x000063E0 25 29 29 2B 2E 2B 30 32 31 2F 2C 27 22 21 1F 20
0x000063F0 23 23 25 24 22 22 21 21 22 22 21 1F 12 12 13 13
0x00006400 13 14 14 15 14 15 13 14 15 16 14 16 16 17 16 18
0x00006410 18 17 17 17 18 1A 1A 1B 1A 1B 1B 1C 1C 1C 1C 1E
0x00006420 1D 22 24 27 29 2D 30 33 3A 3D 3F 44 48 49 51 50
0x00006430 54 57 5B 5F 61 63 63 64 64 65 66 67 62 60 57 55
0x00006440 51 4F 4D 40 34 28 23 1D 18 18 17 17 19 1C 1C 22
0x00006450 22 26 28 29 2A 2B 2C 2C 2E 2C 2D 2E 33 38 3E 48
0x00006460 56 65 73 7B 7A 7A 7A 70 6E 6C 70 76 82 84 7D 74
0x00006470 72 71 6E 70 72 6B 62 58 4D 4B 47 47 4A 4B 52 55
0x00006480 60 62 60 5D 5A 59 57 57 57 5A 58 57 4F 4B 4A 49
0x00006490 46 47 44 47 4A 4D 4D 51 54 58 57 56 53 53 50 4E
0x000064A0 4B 4A 47 48 45 48 46 44 44 47 49 50 51 4E 4F 4F
0x000064B0 4C 4E 52 4F 50 4B 46 44 41 40 41 40 41 40 42 45
0x000064C0 46 43 44 40 43 43 40 44 42 43 3D 3B 37 34 36 38
0x000064D0 39 3D 3E 41 41 40 3D 3D 3A 3B 3C 3F 3D 3E 3C 38
0x000064E0 34 34 31 32 37 3A 3D 3F 3E 41 3F 3B 3A 39 3B 3C
0x000064F0 3D 39 36 39 33 2E 2E 31 34 3A 3B 3F 3D 3A 38 39
0x00006500 37 38 3C 3C 3C 36 34 2F 2E 2D 2D 31 34 34 33 32
0x00006510 2F 2D 2F 31 34 35 34 31 2C 2A 27 27 29 28 2B 2C
0x00006520 2B 26 26 27 27 27 2D 2E 2D 2D 2E 32 32 30 2A 27
0x00006530 25 22 21 20 23 25 25 24 22 21 1E 21 21 21 1F 1E
0x00006540 13 13 13 14 14 13 14 16 15 13 15 15 15 14 16 15
0x00006550 18 17 16 18 18 18 18 19 1A 1A 1B 1A 1C 1D 1C 1F
0x00006560 1F 20 1E 23 26 2C 30 35 39 40 42 47 49 49 4B 50
0x00006570 53 52 56 59 5A 5B 5F 64 62 65 64 67 66 65 68 66
0x00006580 67 61 5B 56 51 53 48 3D 32 27 1E 1A 18 18 18 19
0x00006590 1C 20 23 26 29 2A 2B 2C 2B 2C 2E 2F 2E 30 2F 31
0x000065A0 34 3A 3A 44 52 63 71 76 7C 7D 78 73 71 71 6E 71
0x000065B0 74 75 73 74 70 6F 69 6A 68 62 5B 54 4F 4B 49 47
0x000065C0 4B 4C 4D 51 54 57 55 56 59 54 54 53 51 50 50 4E
0x000065D0 4C 4B 4B 49 4A 47 47 45 45 47 4A 4A 50 52 53 52
0x000065E0 51 52 4F 4D 48 4A 48 46 43 45 46 45 42 44 49 4A
0x000065F0 4B 4B 4D 4F 4C 50 4C 4C 4A 48 48 43 41 41 44 40
0x00006600 3F 41 3F 40 40 3E 3F 42 46 46 42 43 42 42 3D 3A
0x00006610 38 35 36 3B 3C 3C 3A 3E 3C 3B 3A 39 39 3B 3C 3F
0x00006620 3D 3B 34 36 32 31 32 34 34 3A 3A 3D 3D 3C 3B 3A
0x00006630 37 3A 38 39 37 38 34 33 2F 2F 31 31 34 3B 39 3D
0x00006640 3B 39 34 35 3A 3A 38 3A 37 34 30 2E 2E 2B 2F 31
0x00006650 34 35 34 34 33 31 31 31 34 38 32 30 2C 28 27 25
0x00006660 27 29 2A 2C 29 2A 29 27 2C 2A 2A 2C 2C 2C 2D 31
0x00006670 32 2F 2C 2B 27 23 21 22 20 24 23 20 23 21 20 1F
0x00006680 21 21 20 1E 13 12 13 13 15 15 15 15 13 14 15 16
0x00006690 15 16 16 16 17 17 18 18 19 18 19 19 19 1B 1D 1D
0x000066A0 1F 1F 20 22 23 26 2A 2E 32 3B 43 4B 4F 55 5B 5B
0x000066B0 5A 57 59 5A 5B 5B 58 5C 60 5C 61 62 63 63 64 63
0x000066C0 66 68 66 64 62 5D 58 54 52 4E 47 3A 2E 27 1D 1A
0x000066D0 18 19 19 1A 1E 24 28 2B 2B 2D 2E 2F 2E 30 31 32
0x000066E0 30 30 33 33 36 3A 3D 42 4D 5D 6C 78 7C 7B 7D 73
0x000066F0 73 72 75 73 76 74 76 72 6E 70 6B 65 64 5E 56 52
0x00006700 50 4A 49 4B 4C 4A 4C 4D 4E 52 55 56 54 57 55 52
0x00006710 50 4E 4C 4A 4B 49 49 4B 4A 4A 48 47 43 45 45 47
0x00006720 4D 52 54 52 52 52 54 50 4A 47 46 42 45 45 46 45
0x00006730 42 42 44 48 4A 4C 50 52 53 52 50 4B 47 45 44 41
0x00006740 42 43 41 3F 3C 3E 3C 3B 3A 3B 41 44 46 47 45 45
0x00006750 44 3F 3C 39 38 35 39 3A 3A 38 3A 38 37 36 32 35
0x00006760 3A 3C 3E 40 3E 3B 39 34 32 33 34 38 3B 39 39 38
0x00006770 38 38 38 39 38 35 35 36 38 37 33 32 32 2F 31 34
0x00006780 37 38 3B 3A 36 38 36 37 37 38 39 39 34 32 31 2D
0x00006790 2E 2C 31 2F 31 33 35 31 2E 2F 30 32 30 30 31 2E
0x000067A0 2C 28 25 25 26 28 2A 2D 2C 2B 2C 2E 30 31 31 30
0x000067B0 2B 2D 2F 31 32 32 2F 2B 27 27 24 21 23 22 26 23
0x000067C0 21 21 20 21 21 22 21 1E 14 13 13 14 15 14 15 15
0x000067D0 16 16 17 15 17 16 16 15 18 17 18 18 18 1A 19 1B
0x000067E0 1B 1E 21 22 23 24 26 28 2E 34 3C 3F 4A 50 58 5D
0x000067F0 61 63 66 65 69 66 65 65 64 62 64 61 63 63 66 63
0x00006800 64 64 66 63 66 66 67 67 66 62 5B 57 54 4F 43 3A
0x00006810 2B 23 1C 19 19 18 1B 1D 24 2A 2D 2B 2E 2E 30 30
0x00006820 31 32 34 33 38 38 37 3A 3B 3A 3E 3F 4A 58 67 74
0x00006830 7D 7B 79 7A 79 77 7B 7B 78 7C 7E 7D 7B 74 6E 68
0x00006840 64 5F 5A 56 4D 49 49 48 48 4A 4A 4B 4A 50 52 5A
0x00006850 5C 5F 59 54 53 4E 4A 48 48 49 49 4B 4A 4B 46 45
0x00006860 45 42 47 49 4F 55 57 59 58 59 57 55 4E 47 46 45
0x00006870 43 43 46 48 44 44 45 47 49 50 53 56 5B 59 55 50
0x00006880 4A 45 44 42 45 42 3F 3F 3E 3E 3C 3B 3B 3E 43 48
0x00006890 4E 4F 4F 4E 4A 45 40 3C 3B 3A 3B 3A 39 36 36 36
0x000068A0 33 32 33 37 3C 40 45 43 43 3E 3A 35 34 36 36 36
0x000068B0 39 38 34 34 35 34 38 3A 38 39 36 38 36 33 33 35
0x000068C0 31 32 35 35 34 38 35 35 36 34 36 36 36 3A 38 38
0x000068D0 36 33 32 30 2F 30 32 2F 33 31 2F 2F 2E 2B 2E 2D
0x000068E0 2E 2D 2E 29 2B 27 26 25 26 28 2A 2A 2B 2C 2F 2F
0x000068F0 34 30 31 2F 2C 2E 2F 32 35 33 30 2E 2A 27 25 23
0x00006900 24 25 23 23 22 21 21 20 1F 23 20 20 13 11 13 14
0x00006910 13 14 16 15 16 16 16 16 17 16 17 16 17 18 19 18
0x00006920 19 1A 1C 1C 1C 23 27 28 2C 30 34 39 41 48 4E 51
0x00006930 5C 5D 62 64 6B 6A 6A 6C 6D 71 6F 72 72 71 6E 6B
0x00006940 69 6A 69 65 6A 67 68 68 67 67 68 67 67 61 5C 59
0x00006950 58 4D 45 39 2D 23 1C 1A 19 1A 1E 25 29 2B 2C 30
0x00006960 32 31 33 34 35 3A 3B 3D 3F 3E 41 3D 41 3F 41 43
0x00006970 48 59 69 77 7D 7E 7C 7C 7D 7C 7C 81 83 83 86 87
0x00006980 7D 76 70 6F 6B 61 5B 54 4C 4C 4C 45 4A 48 49 48
0x00006990 49 4F 55 5D 60 61 59 58 54 54 4D 4A 47 48 4B 4C
0x000069A0 4B 49 46 45 43 44 48 51 55 5B 5E 5E 5D 5D 5D 58
0x000069B0 52 49 48 45 45 45 45 44 42 43 43 47 4A 4F 54 5E
0x000069C0 5D 5E 5F 57 4D 49 46 43 43 40 41 41 3F 3E 3A 3C
0x000069D0 3C 40 45 51 53 57 54 54 4F 4B 45 3E 3D 3C 3B 38
0x000069E0 39 35 33 32 32 31 34 3A 40 47 4A 4C 48 43 3E 3A
0x000069F0 38 39 37 37 38 35 37 31 33 31 36 3A 3E 3B 3B 3B
0x00006A00 39 39 33 34 34 33 36 35 34 34 35 36 36 38 38 3D
0x00006A10 3F 40 3D 3E 39 35 31 2F 30 30 30 31 2F 30 2D 2C
0x00006A20 2C 2C 2E 2F 2E 2C 2A 2A 26 27 26 25 26 26 28 2B
0x00006A30 2A 2C 30 32 34 37 34 32 2F 2E 32 32 32 34 32 2F
0x00006A40 2B 29 26 25 25 26 24 26 22 22 23 21 22 20 1F 21
0x00006A50 14 14 15 14 14 15 15 15 16 16 16 15 17 18 15 16
0x00006A60 17 19 1B 1A 1D 1E 21 22 26 2D 33 38 3C 42 46 48
0x00006A70 4D 53 57 58 5F 62 63 68 6D 6E 6F 6E 70 71 76 79
0x00006A80 7B 7A 7B 7B 74 72 70 73 73 70 6C 6E 69 6D 6A 68
0x00006A90 68 63 5E 5D 56 50 44 39 2C 20 1B 19 1A 1E 22 28
0x00006AA0 2D 31 32 33 33 35 36 38 3C 3F 43 43 44 46 45 47
0x00006AB0 46 46 45 45 4E 5C 6B 77 7D 80 80 7C 7E 81 82 82
0x00006AC0 87 88 89 86 80 79 73 70 6C 62 56 4F 4C 47 46 46
0x00006AD0 44 46 47 47 49 4F 55 5C 63 63 5F 5B 56 53 50 49
0x00006AE0 48 45 48 49 48 46 46 45 45 46 4B 4F 56 5E 63 64
0x00006AF0 63 65 60 5A 50 4A 46 48 49 47 46 45 45 44 45 48
0x00006B00 4E 54 5D 63 67 65 62 5C 52 4A 47 48 46 44 46 42
0x00006B10 43 3E 3F 3E 44 44 4A 53 56 57 5B 5A 55 4F 47 42
0x00006B20 3E 3E 3B 38 38 34 32 30 30 33 39 3F 46 4D 4E 50
0x00006B30 4C 48 43 3C 39 3A 38 38 36 34 31 30 2F 33 38 3E
0x00006B40 40 43 44 42 3E 3C 37 32 36 36 38 35 34 36 34 35
0x00006B50 35 3A 3C 43 45 47 47 42 3F 38 35 31 32 30 2F 31
0x00006B60 2E 2F 2B 2B 2D 2E 2F 30 2F 2D 2B 29 27 27 26 27
0x00006B70 26 27 26 29 2B 2B 30 34 38 36 36 35 32 2F 30 33
0x00006B80 35 38 35 31 2F 2D 2A 2A 29 28 28 27 25 23 23 23
0x00006B90 22 23 21 21 15 14 15 15 15 14 16 15 17 17 16 17
0x00006BA0 17 1A 19 19 1B 1C 1C 1F 23 26 29 2B 2F 38 3C 40
0x00006BB0 48 4A 4A 4E 50 57 5A 5F 64 62 66 69 6C 6C 6B 70
0x00006BC0 75 75 7A 7C 7F 7D 83 81 7F 7E 81 7F 81 7D 7A 75
0x00006BD0 71 72 6E 6C 6A 67 62 5E 5B 52 46 39 2B 23 1D 1B
0x00006BE0 1D 21 26 2D 31 33 36 35 39 3C 3C 3F 44 46 4A 4B
0x00006BF0 4C 4D 4D 4C 4B 49 46 4A 54 61 6D 7A 7E 7F 7D 81
0x00006C00 80 81 82 85 87 89 86 8A 82 7B 74 6E 67 5F 51 49
0x00006C10 45 46 42 41 43 45 42 43 48 4D 53 5C 5E 5E 5A 58
0x00006C20 54 55 4D 48 45 45 45 44 45 44 45 46 45 48 4B 4D
0x00006C30 57 5F 63 67 63 65 60 5A 51 4B 49 46 46 44 45 43
0x00006C40 46 46 46 48 4C 53 5B 61 64 66 62 5C 53 4D 4B 49
0x00006C50 48 45 45 45 42 42 3E 44 45 47 4D 54 54 56 57 58
0x00006C60 55 4C 48 42 3F 3B 3B 38 36 33 32 31 31 36 3B 42
0x00006C70 47 4E 51 50 51 4A 45 3F 3E 3B 3A 38 33 32 2F 2F
0x00006C80 32 36 3A 42 45 47 46 41 42 3C 3A 38 38 35 36 36
0x00006C90 36 33 35 35 3A 3C 44 47 4B 4D 4B 48 45 3D 34 34
0x00006CA0 31 2F 2F 2C 2E 2C 2A 2C 2E 32 37 33 34 31 2D 2E
0x00006CB0 28 27 27 27 26 26 26 28 29 2C 2F 33 39 37 36 38
0x00006CC0 33 33 33 33 35 38 33 32 32 31 2F 2D 2D 2C 2B 2A
0x00006CD0 28 27 25 24 23 24 21 21 14 13 14 14 16 15 15 17
0x00006CE0 16 17 18 16 19 19 1C 1D 1D 21 25 26 2B 2F 36 3A
0x00006CF0 3C 3F 43 4A 4D 4A 4E 4E 54 55 59 5B 5F 65 69 69
0x00006D00 6C 6D 6E 6E 75 79 7B 7F 7D 81 80 82 85 84 89 8B
0x00006D10 8B 8C 89 85 81 79 76 72 70 6A 68 66 61 56 47 3A
0x00006D20 30 23 1F 1C 1C 22 2A 2F 38 36 36 39 3C 3F 45 49
0x00006D30 4C 4D 4F 52 54 53 51 4D 4B 4B 48 4E 58 63 6E 7C
0x00006D40 7E 82 7E 80 81 83 83 84 85 85 87 87 7F 7B 77 6E
0x00006D50 66 5A 50 49 49 44 44 3E 3F 3F 3F 41 46 4A 56 59
0x00006D60 5B 58 57 56 57 51 4C 48 44 40 41 43 42 45 45 46
0x00006D70 46 49 49 50 54 5B 5F 63 5E 61 5A 56 4E 49 4A 48
0x00006D80 45 48 45 44 46 44 45 46 4C 52 55 5C 61 5F 61 5A
0x00006D90 54 51 4C 4A 49 45 46 48 44 44 45 46 47 49 50 50
0x00006DA0 53 55 53 53 50 4B 44 42 3F 3D 3C 3A 34 36 34 35
0x00006DB0 35 35 3D 43 47 4E 4E 52 4C 47 43 40 3C 3B 36 33
0x00006DC0 31 2E 31 32 33 36 3C 3E 46 46 48 3F 3D 39 37 38
0x00006DD0 35 35 36 35 36 38 36 3A 3C 3E 46 47 51 53 51 4A
0x00006DE0 47 3E 3A 34 32 30 30 2E 2F 2C 2E 2F 32 39 3D 3E
0x00006DF0 3D 34 32 30 2A 29 27 26 25 25 26 27 2A 2B 32 34
0x00006E00 3B 3F 3C 39 38 34 34 34 35 33 34 34 32 33 33 32
0x00006E10 33 30 30 2E 2C 29 29 25 22 22 22 22 13 12 14 15
0x00006E20 15 16 16 16 17 16 18 19 1A 1D 1F 23 27 2A 30 31
0x00006E30 35 3B 3E 40 43 44 48 4D 4C 4B 4F 50 55 56 5A 5C
0x00006E40 62 64 68 6A 6A 6D 6E 6D 6F 79 7C 7B 7D 80 84 83
0x00006E50 84 8C 8D 8E 8F 94 94 91 91 8A 83 7C 76 73 6B 6B
0x00006E60 69 5A 4C 3D 33 26 1E 1C 21 25 2D 31 38 3B 39 3C
0x00006E70 40 46 4F 4E 55 56 58 5B 56 55 54 52 50 4C 4B 52
0x00006E80 5C 67 75 7D 80 83 81 7D 80 81 84 85 83 8A 89 88
0x00006E90 7F 7B 76 6F 65 5A 50 47 45 43 3E 3E 40 3D 3F 3F
0x00006EA0 46 50 59 5F 5D 59 55 55 54 50 4E 42 41 41 3F 41
0x00006EB0 43 45 46 47 48 48 4A 4D 53 57 5C 59 5A 58 56 51
0x00006EC0 4C 4A 48 48 46 47 47 45 48 47 46 45 48 4E 54 58
0x00006ED0 5A 5A 5B 57 56 4E 4C 4A 49 49 49 48 47 47 48 48
0x00006EE0 47 4B 4D 4D 52 4F 51 52 4E 4A 47 44 40 41 3D 3C
0x00006EF0 38 38 38 37 39 39 3F 42 46 45 49 4B 4A 46 42 3E
0x00006F00 3C 38 34 34 32 2F 2E 31 32 36 3A 3C 3F 3F 40 3C
0x00006F10 3A 3A 38 36 36 38 35 37 36 35 39 36 3D 3F 45 48
0x00006F20 4F 50 4F 4A 45 3D 39 36 35 32 32 30 2C 2F 2E 31
0x00006F30 38 3B 43 43 40 3E 38 32 2C 2B 29 28 29 28 28 28
0x00006F40 2B 2C 33 3B 3D 3E 40 3B 3B 37 35 38 34 33 34 34
0x00006F50 35 36 35 36 38 38 34 32 2F 2C 2A 27 25 24 23 23
0x00006F60 12 13 13 15 17 17 18 17 18 19 18 1B 1E 22 26 2A
0x00006F70 2E 33 35 3B 3C 3F 42 43 47 44 49 4C 4E 4F 50 54
0x00006F80 56 59 5C 5E 62 67 69 69 6D 6B 6F 71 73 74 7A 7D
0x00006F90 7E 7F 87 86 8B 8B 8E 91 91 92 98 98 95 92 8E 8C
0x00006FA0 80 7A 76 73 6D 60 4F 42 32 2B 20 1F 20 28 2E 35
0x00006FB0 3B 39 3C 43 48 4E 54 5B 5A 5C 5D 5A 58 5A 56 54
0x00006FC0 4F 4C 4E 59 61 6F 79 81 82 84 82 81 84 7F 84 83
0x00006FD0 83 86 88 87 7D 7C 75 6C 68 5A 4E 45 42 3F 3C 3D
0x00006FE0 3E 3E 41 42 49 51 5A 64 61 57 53 55 54 52 4E 47
0x00006FF0 43 40 40 41 45 47 4A 48 4A 4A 48 4B 4C 50 56 54
0x00007000 53 52 51 4C 4B 4B 46 46 47 48 48 48 49 44 47 45
0x00007010 4A 4B 52 56 56 56 58 53 50 4D 4B 4C 4B 4B 4A 4B
0x00007020 4A 47 4A 46 4B 49 49 4B 4D 4E 4C 4C 4A 4A 47 43
0x00007030 42 3E 3C 3C 3C 38 38 3B 3A 3C 3F 40 44 42 45 46
0x00007040 45 42 3F 3E 39 35 32 33 30 2F 30 2F 33 34 39 39
0x00007050 3C 3A 39 38 39 39 38 37 38 36 39 38 35 36 37 38
0x00007060 3A 3F 42 45 49 4A 4B 46 42 3C 39 35 34 34 33 30
0x00007070 30 2F 37 34 3A 40 40 43 44 3F 39 34 31 2C 2B 2B
0x00007080 2A 29 2A 2A 2D 31 32 39 3E 41 43 3F 3E 3C 3A 35
0x00007090 34 35 34 34 32 34 37 3B 3E 3C 3A 39 32 2D 29 29
0x000070A0 27 23 25 24 12 14 13 15 16 19 1A 19 1B 1C 1E 21
0x000070B0 25 28 2D 30 34 38 3B 3F 41 43 42 44 46 47 4A 4D
0x000070C0 4F 4D 53 53 57 56 59 5E 64 67 69 6C 6C 6C 6E 6F
0x000070D0 71 74 7A 76 7C 80 82 86 85 8A 92 92 95 95 97 9A
0x000070E0 9E 9B 99 90 8C 84 7D 82 78 6A 58 48 3B 2F 28 22
0x000070F0 24 2A 36 3A 3B 3F 42 47 4F 56 5B 5E 5F 61 60 5C
0x00007100 5E 5A 55 52 50 4E 53 5F 68 73 7C 86 83 80 82 85
0x00007110 81 82 7F 81 81 88 86 82 7E 7D 74 6C 62 57 4D 47
0x00007120 41 3F 40 40 3F 3E 3D 42 4B 53 65 66 63 5B 59 57
0x00007130 56 4E 4B 44 41 40 40 43 44 48 4D 4B 48 4A 4A 4E
0x00007140 4D 4D 4B 4E 4D 4D 4C 4A 49 47 48 49 46 47 46 47
0x00007150 48 48 4A 47 47 49 4F 50 4F 51 52 52 4F 4C 4C 4C
0x00007160 4C 51 4C 49 4C 4B 4B 4C 4C 4D 4C 4B 4A 4A 4C 48
0x00007170 48 44 45 44 41 3F 3F 3E 3E 3C 40 3C 3E 3E 41 41
0x00007180 40 42 42 41 43 3D 3B 3C 39 36 33 33 32 32 32 2F
0x00007190 32 33 34 37 39 36 39 3B 38 37 36 3A 37 38 34 3A
0x000071A0 3A 39 38 35 3A 3A 3E 41 45 44 45 42 3D 3D 3C 3A
0x000071B0 38 37 35 35 35 36 35 37 37 3B 3F 41 40 3C 38 33
0x000071C0 31 2D 2D 2A 2D 2E 2C 2D 2F 2F 33 3A 3A 42 44 43
0x000071D0 42 3D 3A 37 38 35 35 34 34 38 39 3E 3C 3D 3C 39
0x000071E0 32 2F 2B 29 25 23 25 26 13 14 17 19 19 1E 1E 20
0x000071F0 23 25 26 2A 2B 31 32 36 38 3B 3D 3E 3E 41 45 46
0x00007200 48 4B 4D 4C 50 50 52 59 54 58 5C 61 64 63 69 6C
0x00007210 6B 6D 6F 74 75 74 77 7B 7B 7F 86 87 89 8C 8F 94
0x00007220 94 97 9C 9A 99 9D 9C 95 91 8D 88 88 85 79 62 51
0x00007230 41 32 2B 26 26 2C 38 3A 3D 40 43 4B 53 5B 5C 65
0x00007240 64 62 61 5E 5C 5A 58 52 4F 55 5D 69 6E 7A 80 85
0x00007250 82 85 84 7F 81 7B 7D 7B 81 83 82 7F 7A 75 6E 6E
0x00007260 62 56 4D 45 42 3D 3E 3D 3C 3E 3E 43 4B 53 5D 66
0x00007270 65 5D 54 54 4F 4D 48 42 41 3F 43 43 4A 4E 4E 4D
0x00007280 4A 4A 4D 49 49 49 4A 4B 4B 4A 4B 49 48 45 47 47
0x00007290 46 47 48 46 4A 46 47 48 4B 4D 4C 4C 4E 4F 4D 4F
0x000072A0 4D 4C 4D 4B 4D 4C 4B 4C 4D 4C 4C 4A 4B 4D 4A 4A
0x000072B0 49 46 46 47 47 47 46 41 42 43 44 42 40 41 41 42
0x000072C0 40 40 3F 40 41 42 43 42 40 3F 3F 3D 3A 36 34 35
0x000072D0 35 33 34 33 34 35 35 35 36 36 3A 3A 36 3A 39 39
0x000072E0 38 38 38 38 39 36 36 3A 3B 3A 3E 3E 3E 44 43 40
0x000072F0 40 41 3E 3D 3D 3D 3B 3B 3A 3B 39 3D 3C 3E 3D 3F
0x00007300 3D 3B 37 33 33 31 31 2F 2F 30 2F 2F 2F 31 35 3B
0x00007310 3D 43 41 44 3E 39 3B 39 39 36 38 35 36 3A 3A 3E
0x00007320 3F 3E 3E 3C 36 32 2F 2A 28 28 26 27 16 17 19 1E
0x00007330 20 25 2A 26 2C 2B 2D 2F 33 34 34 35 38 3B 3F 40
0x00007340 43 45 45 49 49 4B 4C 50 52 53 53 57 59 5A 5D 5F
0x00007350 67 65 67 6A 71 71 72 74 72 78 79 78 7E 80 82 89
0x00007360 87 8F 91 97 93 9A 9B 9F 9E 9B A0 9D 98 8D 8E 94
0x00007370 94 85 6F 5A 4B 39 30 2C 29 2F 39 41 3F 44 48 4F
0x00007380 5C 60 64 67 66 66 63 60 58 57 54 52 56 5B 64 6E
0x00007390 79 7E 83 87 83 86 81 80 7D 77 74 74 7A 7C 74 72
0x000073A0 6B 6C 6A 64 59 51 47 42 41 3F 41 3F 3E 3E 3F 43
0x000073B0 49 4F 5A 5F 62 57 53 4E 4B 49 45 42 42 40 42 46
0x000073C0 49 4C 51 4F 4E 4C 4C 4E 4D 4E 48 4A 4A 4B 4B 4B
0x000073D0 47 49 48 46 48 49 4A 46 45 47 49 4A 4B 4E 4B 4D
0x000073E0 4C 51 4F 4D 4D 49 4C 4C 49 49 48 4C 49 4A 4A 4A
0x000073F0 49 49 4A 48 46 47 46 45 44 44 46 43 44 43 43 42
0x00007400 43 42 3F 42 3F 42 42 41 42 42 41 41 40 3F 3F 3B
0x00007410 39 39 38 39 36 36 36 35 34 37 34 36 38 3A 36 3A
0x00007420 38 39 36 36 38 34 36 38 39 36 38 36 38 3B 3D 3E
0x00007430 3F 40 42 42 42 3E 42 41 41 3F 3E 3D 3D 3D 3B 3D
0x00007440 3D 40 3D 3F 3F 3C 39 38 39 36 34 34 32 32 33 33
0x00007450 36 35 38 3D 3F 45 43 3E 3C 3A 39 38 38 39 38 39
0x00007460 3A 38 3D 3D 3C 3D 3A 3C 38 34 31 2C 2A 29 28 27
0x00007470 1A 1C 20 23 27 29 29 2A 2D 31 32 34 34 38 34 36
0x00007480 39 3A 3C 40 42 44 48 4A 4A 4B 4F 4D 53 52 55 57
0x00007490 58 5C 5E 5F 65 67 69 69 6D 70 72 75 78 7A 7C 7D
0x000074A0 7F 83 83 86 8B 8F 93 97 96 9A 9B 9E 9E 9F 9F 9E
0x000074B0 97 8D 94 9E A1 9A 7E 6B 57 46 3A 31 2E 34 3E 41
0x000074C0 45 49 4D 5A 62 65 65 6A 68 64 5F 5D 58 55 55 59
0x000074D0 5D 63 6B 74 7C 83 84 85 84 84 7C 7E 75 75 70 6F
0x000074E0 71 6E 68 66 62 5F 5C 58 55 4C 46 44 42 41 40 3E
0x000074F0 3F 41 3E 40 43 4C 54 59 57 53 4E 47 46 43 41 41
0x00007500 3E 41 44 46 4E 52 4F 4F 4F 4E 4E 4C 4D 4D 4B 4B
0x00007510 49 4C 48 49 46 48 46 46 48 47 48 46 46 48 4C 4B
0x00007520 4A 4C 4C 4E 50 51 54 4F 4E 4D 4B 49 48 49 47 49
0x00007530 49 49 46 47 45 46 46 43 45 44 45 44 43 43 44 43
0x00007540 42 44 44 42 41 43 40 3E 41 3D 41 40 40 42 40 43
0x00007550 3F 3E 3D 3C 39 39 3A 39 36 39 39 35 37 35 37 38
0x00007560 3A 39 3A 37 39 39 38 36 39 38 38 36 38 37 3A 3A
0x00007570 38 3B 3D 3F 41 3F 42 42 42 42 41 41 3E 41 3F 3E
0x00007580 3E 3F 3D 3E 3C 3D 3D 3E 3D 3D 3B 38 3A 3A 38 3A
0x00007590 36 39 3A 37 39 39 3E 42 45 45 44 3E 3C 3A 3B 3A
0x000075A0 39 39 3A 38 39 39 3C 3E 40 3F 3E 3B 3B 35 31 2E
0x000075B0 2C 29 28 27 21 21 24 26 28 28 2C 2D 2F 32 33 34
0x000075C0 34 34 35 36 37 3C 3E 3E 40 45 46 48 49 4B 4C 4F
0x000075D0 53 53 57 58 59 5C 5F 64 67 68 6A 6C 6E 72 73 76
0x000075E0 77 77 7D 80 7F 81 85 88 89 8D 91 92 92 9A A1 9A
0x000075F0 A0 A2 9E 9E 98 94 98 A3 AB A3 92 79 61 51 44 3A
0x00007600 33 36 3E 46 48 4D 56 5F 64 6B 68 65 62 5E 59 58
0x00007610 55 56 58 5E 68 6C 79 7D 86 89 89 88 83 81 7F 75
0x00007620 72 6F 6D 6B 64 5F 5E 58 57 53 52 4F 4B 46 42 42
0x00007630 42 40 3F 3D 3C 3E 40 41 43 47 4C 4F 4D 4C 48 42
0x00007640 40 41 3F 3D 41 3F 42 49 4F 54 55 56 51 4F 50 50
0x00007650 4F 50 4B 49 4A 4A 49 4A 4A 49 48 4A 4A 45 45 49
0x00007660 4B 4B 4E 4C 4D 4C 4E 4E 51 53 4E 4D 4D 4D 4B 47
0x00007670 44 47 45 46 46 45 45 46 44 44 44 42 44 43 41 42
0x00007680 41 3F 41 3E 3F 3F 41 42 40 40 3E 42 3F 3D 3F 3D
0x00007690 3F 3E 3D 3C 3C 3C 3B 3C 3A 3A 39 39 35 3A 3A 39
0x000076A0 36 37 39 37 38 37 38 38 38 39 34 3B 3A 37 38 38
0x000076B0 37 39 3A 38 3D 3C 3D 3F 42 41 40 42 3F 3F 3D 40
0x000076C0 3E 3C 3E 3C 3D 3D 3E 3B 3D 3C 3F 3B 3A 3C 3B 3A
0x000076D0 39 39 38 3A 38 3A 39 3C 3D 3F 3F 43 46 49 45 43
0x000076E0 3E 3B 3A 3A 38 3A 38 38 3A 3A 3D 3F 3F 43 43 41
0x000076F0 3B 38 33 32 2E 2C 29 29 23 25 26 28 28 2C 2D 2E
0x00007700 31 31 31 34 35 34 34 35 39 3A 3E 41 43 43 46 47
0x00007710 4D 4C 4E 51 52 53 55 58 58 5C 5E 67 64 67 6A 6C
0x00007720 72 74 75 75 7C 7F 81 7D 84 87 87 89 89 8B 92 97
0x00007730 98 98 A0 9F A1 A2 A2 A0 9A 92 9D A8 AF AF 9E 86
0x00007740 73 5F 52 44 41 3C 41 46 49 4E 57 5F 68 6D 6C 63
0x00007750 5B 59 59 5A 58 5B 63 67 71 77 80 84 8A 8C 8A 88
0x00007760 84 7E 7D 71 6E 69 66 60 5C 57 56 55 4D 4A 4C 4B
0x00007770 47 45 42 41 40 40 3E 41 3F 40 3E 3E 3F 43 46 47
0x00007780 47 43 41 3F 3E 3F 3D 41 3F 42 42 48 52 57 54 54
0x00007790 52 4E 53 52 4F 4F 4B 4B 4F 4B 4C 49 4C 4A 49 4B
0x000077A0 48 47 4B 4C 4D 4C 4A 4B 4A 4E 52 54 54 50 50 4F
0x000077B0 4C 4C 48 45 45 44 43 48 46 45 48 46 45 45 46 44
0x000077C0 41 41 42 3E 41 42 40 43 42 41 40 3F 42 3F 41 3F
0x000077D0 40 3F 3E 3E 41 3D 3E 3E 3B 3C 3B 3C 3A 39 3A 3A
0x000077E0 3C 3A 3A 3A 3A 39 3B 38 3B 3A 36 3A 38 37 38 38
0x000077F0 39 35 3A 38 38 39 39 3C 3D 40 42 3F 41 40 40 42
0x00007800 40 3F 41 3C 3C 3E 3E 3C 3D 3D 3C 3B 3B 3C 3B 3B
0x00007810 3A 39 3A 39 38 38 37 36 3A 39 3A 3D 3F 42 44 46
0x00007820 48 47 49 46 42 41 39 39 38 38 36 39 37 39 3A 3D
0x00007830 40 41 43 41 3D 39 39 34 30 2F 2A 2B 25 25 28 29
0x00007840 2A 2A 2B 2E 2F 30 32 33 35 35 36 38 39 3D 40 41
0x00007850 42 43 47 4C 4B 4C 4C 52 51 55 56 5B 5A 5E 63 66
0x00007860 69 6B 6B 6D 72 71 74 77 7C 7E 7C 81 82 86 89 87
0x00007870 8B 8C 8E 98 93 9D A0 9F A3 9E A3 A1 9A 97 A1 AD
0x00007880 B8 B4 A9 98 87 72 66 5A 4F 46 43 45 48 4D 54 5D
0x00007890 61 61 61 62 5F 5A 5B 5E 5E 66 6E 73 7C 83 8A 90
0x000078A0 8F 8F 8D 89 83 7C 73 6C 6A 62 5C 59 55 53 51 4D
0x000078B0 49 47 47 46 44 42 41 41 40 41 41 3D 42 3E 3E 3E
0x000078C0 3F 3F 3F 42 3F 3E 3D 3F 3C 3D 3E 3F 40 40 44 49
0x000078D0 52 56 53 53 51 51 52 54 51 4F 4B 4A 4B 4F 4D 4E
0x000078E0 4A 49 47 4A 49 4A 4A 4B 4C 4E 4D 4C 4E 56 54 55
0x000078F0 54 52 55 4F 4E 4A 46 46 46 44 46 47 45 46 43 47
0x00007900 46 43 44 45 42 44 42 43 43 43 42 42 41 43 3F 41
0x00007910 41 3F 41 3F 3F 3F 3E 3E 40 40 3D 3F 3F 3F 3C 3C
0x00007920 3D 3B 3A 3B 3A 3B 3A 3A 3A 38 38 39 39 39 3A 3A
0x00007930 3A 39 39 3A 35 3B 39 38 39 3A 37 3B 3F 3F 3F 3E
0x00007940 3E 40 3F 3F 3C 3C 3A 3E 3C 3D 3B 3B 3B 3C 3B 38
0x00007950 39 3A 38 39 38 3A 38 36 38 37 38 38 38 39 3A 3A
0x00007960 3F 40 42 44 49 49 47 47 42 41 3C 39 39 33 33 33
0x00007970 33 34 38 39 3B 3F 3F 3E 3B 39 36 33 32 2F 2D 2B
0x00007980 24 27 26 29 2B 2C 2D 2E 31 33 33 35 33 34 35 38
0x00007990 3B 41 41 42 45 44 49 4A 48 4B 50 4F 51 53 53 58
0x000079A0 5A 5E 62 65 67 67 6D 6C 73 73 7A 79 79 7E 7D 83
0x000079B0 85 84 8A 89 8D 93 91 93 9D 9A 9E 9D 9E A3 A4 9F
0x000079C0 9C 99 A1 B1 BC BD B1 A5 9A 88 7C 71 67 5C 54 52
0x000079D0 4D 50 54 59 5C 5F 60 62 61 61 64 6A 6D 70 7E 84
0x000079E0 8C 8E 92 97 93 93 91 88 7E 77 70 69 65 5E 56 55
0x000079F0 51 4F 4C 49 47 45 43 46 45 42 43 43 43 42 43 3E
0x00007A00 41 41 3E 3D 41 3E 3E 3F 3F 3E 3D 3F 3F 40 3E 3F
0x00007A10 42 42 46 4B 4E 55 58 54 53 50 54 55 52 4F 4D 4C
0x00007A20 4D 4F 52 4F 4E 4B 4B 4A 4A 4A 4D 4C 4B 4B 4B 4E
0x00007A30 53 56 56 53 54 53 54 4E 47 48 46 45 46 46 44 45
0x00007A40 44 45 48 48 44 45 43 43 41 44 43 42 41 43 42 41
0x00007A50 41 3F 42 3E 3E 3E 3F 3D 3E 3F 3D 3D 3C 3E 3B 3C
0x00007A60 3A 3E 3E 3C 3D 3B 3C 3C 3B 3A 3C 39 3A 3A 39 3C
0x00007A70 3B 39 39 39 38 39 38 3A 38 3A 3A 39 39 3A 3B 3F
0x00007A80 3F 40 3D 3E 41 3E 3A 3A 38 36 39 38 38 39 35 39
0x00007A90 35 39 36 34 37 35 37 36 39 35 36 36 35 34 36 35
0x00007AA0 39 38 3A 39 3B 40 42 46 48 49 4A 47 46 43 3E 3B
0x00007AB0 38 39 35 36 37 38 35 3A 3B 3C 3E 40 39 37 34 33
0x00007AC0 31 2F 2F 2C 25 27 2A 28 2C 2B 2E 2E 33 30 32 38
0x00007AD0 38 37 39 38 3C 40 44 44 44 46 49 4B 4B 4E 52 53
0x00007AE0 51 50 52 54 58 5F 62 65 6A 6D 6C 6E 72 73 75 79
0x00007AF0 7D 7B 82 81 83 85 87 8B 8D 90 91 99 99 9C 9E A2
0x00007B00 A0 A1 A0 9D 9B 9F A7 B3 C2 C1 BE AD A5 9F 94 8D
0x00007B10 80 73 6A 60 5F 5C 5F 63 61 66 69 69 6D 6B 70 76
0x00007B20 7C 85 8C 92 97 9B 9D 9E 9C 99 93 89 83 7A 6E 68
0x00007B30 64 5D 57 54 4F 4D 49 49 44 46 43 44 43 43 43 42
0x00007B40 44 44 46 45 44 44 41 40 3F 3E 3E 3E 3D 40 3F 3D
0x00007B50 3E 3D 3E 3F 41 43 46 4D 52 57 56 58 54 55 56 54
0x00007B60 51 4E 4B 4B 4F 51 53 52 50 4E 4C 4D 4D 4F 50 4E
0x00007B70 4D 4F 4E 56 59 59 54 53 52 53 4F 4A 45 46 46 46
0x00007B80 46 44 44 47 48 4B 49 46 48 49 48 45 43 42 43 44
0x00007B90 43 43 45 43 43 42 41 3F 3E 3C 3E 3A 3C 3B 3C 3C
0x00007BA0 3B 3A 3E 3A 3B 3A 3B 3B 3A 37 39 39 37 3A 38 37
0x00007BB0 39 39 38 39 39 35 38 39 39 39 36 37 38 38 39 3A
0x00007BC0 3A 39 3B 3B 3C 3D 3C 3F 3C 39 39 38 34 34 34 32
0x00007BD0 34 34 33 33 33 33 33 31 32 33 32 33 35 33 36 33
0x00007BE0 34 31 35 36 33 36 36 38 38 3B 3F 44 49 4C 4C 4D
0x00007BF0 4A 47 40 3E 3C 39 37 38 39 3A 36 3A 3D 3F 40 3C
0x00007C00 3E 3A 34 34 33 34 2F 30 28 29 2A 2B 2C 2C 30 31
0x00007C10 31 33 35 3A 39 3A 3B 3E 3E 3F 43 42 47 47 4B 4A
0x00007C20 4B 4F 52 53 4F 52 55 54 5A 5F 63 69 69 6E 70 6D
0x00007C30 72 71 79 77 7C 7B 82 85 81 87 88 89 8C 93 98 99
0x00007C40 9C 9D 9B A3 A4 A4 A3 9C 9E 9E AB BC C8 C5 C3 BF
0x00007C50 B6 AF A8 A5 9A 91 88 7F 79 72 73 6F 70 72 74 76
0x00007C60 79 7F 82 86 8C 97 9A 9D A3 A1 A1 A3 9E 9E 98 8B
0x00007C70 80 7B 6C 67 5F 58 57 51 4B 4B 48 48 46 48 44 44
0x00007C80 41 43 44 46 49 49 4A 49 47 47 42 40 42 40 3E 3F
0x00007C90 3F 40 3F 3D 3E 3F 42 3F 42 42 45 4B 55 57 57 56
0x00007CA0 52 54 54 54 56 4E 4A 4C 52 55 51 4D 4E 4E 4F 4E
0x00007CB0 52 53 51 4B 51 50 56 5A 5B 58 56 56 54 51 4D 4A
0x00007CC0 48 45 47 47 47 48 47 4B 4B 4F 53 50 4C 4E 4A 49
0x00007CD0 44 47 46 45 45 47 48 47 47 44 41 41 3D 3C 3B 3B
0x00007CE0 38 3A 39 3C 3A 3C 3B 39 3A 36 39 35 38 38 38 3A
0x00007CF0 36 36 39 39 38 37 38 36 36 39 3A 38 3A 39 36 35
0x00007D00 37 39 38 38 39 3A 39 38 3C 3B 3C 3C 39 34 38 33
0x00007D10 34 34 32 32 30 33 32 31 32 2F 2E 2E 2E 2F 31 32
0x00007D20 33 35 31 33 35 33 33 35 35 34 36 38 3B 3C 41 42
0x00007D30 48 4E 4E 4E 4A 48 43 3E 3D 3A 3B 39 3A 38 38 3B
0x00007D40 3C 3D 3F 3D 3B 37 34 33 31 31 31 2E 25 27 29 29
0x00007D50 2D 2C 30 32 32 35 38 3A 3C 3E 3C 3F 40 41 42 44
0x00007D60 44 48 4A 4D 4E 51 57 53 51 54 52 58 5A 5E 67 69
0x00007D70 6B 6E 6E 73 71 76 76 7B 7B 7C 7E 7F 81 87 88 8C
0x00007D80 92 92 92 9B 9C 9E A2 9F A2 A6 A2 9E 9B 9E B3 BF
0x00007D90 CC D0 CD C9 BE C2 BA BB AF AA A8 9D 8E 8E 8A 86
0x00007DA0 84 89 86 8A 8D 8F 9A 9B A2 A4 AA A8 AB A6 A9 A7
0x00007DB0 A7 A3 99 8E 81 7B 6E 62 5E 58 51 4F 4A 4C 49 46
0x00007DC0 45 47 47 45 45 45 48 4B 4E 51 51 4D 4A 48 46 43
0x00007DD0 3E 40 40 41 3F 40 3D 40 3F 3F 42 41 42 45 46 4D
0x00007DE0 54 58 57 56 57 55 55 57 54 4F 4C 4B 4E 54 53 50
0x00007DF0 4E 4F 51 55 54 54 52 54 52 52 5A 5B 5C 59 57 56
0x00007E00 54 4D 4B 46 47 47 47 47 46 4A 4C 53 54 58 57 57
0x00007E10 56 53 4F 48 46 45 45 44 45 44 49 49 48 47 44 41
0x00007E20 3F 3C 3C 3A 38 3A 39 38 3A 3A 3A 37 3A 37 38 39
0x00007E30 38 36 36 38 35 37 36 38 35 37 38 38 35 36 38 35
0x00007E40 37 35 36 35 35 38 3B 3A 39 3A 3A 39 3B 3F 3E 39
0x00007E50 38 34 35 36 36 37 33 32 31 33 33 32 31 2F 2E 2D
0x00007E60 2D 2C 31 32 34 34 34 35 34 35 38 3B 38 38 36 36
0x00007E70 38 3C 3E 41 45 4D 50 4E 4A 49 44 42 3C 3B 3B 39
0x00007E80 36 39 3B 39 3B 3C 3E 3B 3A 33 33 32 30 32 30 31
0x00007E90 24 26 28 2A 2D 2C 2E 2F 32 34 36 3A 3B 3D 40 41
0x00007EA0 3E 3F 45 45 48 49 4C 4D 4E 50 52 53 4E 53 54 59
0x00007EB0 5B 5F 67 6C 6C 6F 72 71 74 77 7A 7B 7E 7D 81 7E
0x00007EC0 82 84 88 8D 91 93 9A 9B 9D A1 A2 A2 A4 A4 A3 9B
0x00007ED0 9C A1 B2 C2 D1 D3 D7 CD C7 CA C4 C6 C3 C0 BD B0
0x00007EE0 AB A9 A2 9D 9B 9A 9B 9B 9E A2 A7 A9 AB A9 AA AC
0x00007EF0 AE B1 AF AD A6 A5 9E 8F 84 7C 6E 69 5E 56 53 4D
0x00007F00 49 4A 4A 48 46 47 48 47 46 47 4A 53 53 53 51 55
0x00007F10 4C 4D 49 46 41 42 3F 40 3F 3D 40 40 3E 3E 3F 40
0x00007F20 42 43 45 4A 55 5C 59 58 55 54 58 55 55 51 4B 4C
0x00007F30 51 52 4F 51 4E 4E 52 53 55 58 55 54 56 57 5A 5A
0x00007F40 58 59 5A 5C 52 4F 4A 48 48 48 48 47 4A 4F 53 58
0x00007F50 59 5B 5C 5D 58 53 4E 4B 48 47 43 42 47 46 45 47
0x00007F60 46 45 44 3E 3D 3C 39 37 39 37 38 39 35 38 38 35
0x00007F70 38 38 35 35 35 35 34 34 35 36 36 34 37 33 36 35
0x00007F80 35 37 36 35 33 33 33 38 35 39 39 38 3A 39 37 3B
0x00007F90 40 46 48 40 3C 39 38 38 38 39 36 34 33 33 32 33
0x00007FA0 31 32 30 2A 2B 2A 2E 33 34 38 34 38 38 36 39 39
0x00007FB0 39 38 36 38 36 37 3B 42 44 4F 53 51 4C 4A 47 43
0x00007FC0 40 3A 39 3A 38 39 38 39 38 39 36 35 35 35 31 31
0x00007FD0 2F 30 2F 30 26 28 27 29 2D 2F 2D 32 33 36 39 38
0x00007FE0 3C 3D 3E 42 42 40 44 45 47 4A 4C 50 51 50 55 55
0x00007FF0 53 51 57 59 5D 64 68 6C 6C 6E 6E 76 74 7A 7A 79
0x00008000 7B 7C 7B 7D 80 83 89 8D 8E 92 98 9B A0 A4 A0 A4
0x00008010 A0 A3 A1 A2 9A A3 B1 C1 D1 D6 D4 D7 D0 CF CB C7
0x00008020 CA C7 C6 C4 C1 BA B4 AF AF AD AC AE AB AE B1 B2
0x00008030 B4 B5 BA B4 B5 B1 B2 B1 AE A8 A0 91 87 79 73 69
0x00008040 62 5A 50 4E 4B 4A 4B 48 4A 4A 49 48 49 49 4E 53
0x00008050 57 5A 58 58 4F 4C 49 45 44 42 3F 41 42 41 40 40
0x00008060 3E 41 42 42 43 44 47 4D 56 58 5C 58 56 58 58 58
0x00008070 52 51 4C 4F 51 54 54 51 4E 50 53 54 56 5A 54 55
0x00008080 5A 5D 5D 5B 5B 5C 5B 56 52 4F 4B 4C 4D 49 4A 4B
0x00008090 4E 53 56 59 5D 62 62 60 5C 53 4C 48 47 42 45 42
0x000080A0 48 46 47 46 44 41 3F 3C 39 3A 38 3A 34 35 34 33
0x000080B0 34 36 36 38 35 34 34 31 34 33 33 34 36 33 33 32
0x000080C0 33 34 34 34 34 33 35 34 31 34 34 39 38 38 38 38
0x000080D0 36 3B 3C 43 4E 55 55 50 47 40 3B 39 3B 3C 3A 33
0x000080E0 34 36 35 34 33 32 2E 2A 2B 2B 2D 32 35 38 37 3A
0x000080F0 3A 3A 3C 3D 3C 3B 3A 35 35 38 3E 42 46 52 53 53
0x00008100 4D 4C 49 43 3C 38 37 35 35 33 38 35 34 35 34 34
0x00008110 33 31 30 2F 2D 2E 2E 31 25 27 27 28 2B 2D 2C 31
0x00008120 34 33 37 39 3C 3E 3F 3F 3F 41 44 48 48 49 4C 4F
0x00008130 52 52 56 58 58 54 58 5A 5E 64 66 6C 6D 70 71 74
0x00008140 75 75 7B 75 7C 77 77 79 7C 7F 86 8A 92 98 9B 9C
0x00008150 9D A1 A1 A2 A4 A4 A2 9F 9C A3 AE C6 D1 D6 DB DA
0x00008160 D7 D6 D7 D0 CE C9 D0 CA C8 C8 C3 BA B9 B9 B7 BA
0x00008170 B8 B5 B5 B8 B6 B9 B5 BB BA B4 B6 B3 B2 AF A3 92
0x00008180 8A 7F 73 6C 62 5B 53 50 4D 4E 4B 4A 4C 4B 4B 4C
0x00008190 4C 4F 54 56 58 5B 5A 59 52 4F 48 46 43 41 42 41
0x000081A0 41 41 42 3F 3E 3F 3E 42 42 43 48 4A 56 5A 59 59
0x000081B0 55 57 57 59 56 51 4C 4C 53 55 55 52 51 52 50 54
0x000081C0 58 59 55 5A 5C 5C 5A 5E 5F 5B 57 57 53 4E 4E 4F
0x000081D0 4C 4E 4C 50 50 57 5A 5F 61 66 6A 64 61 57 4D 49
0x000081E0 44 44 43 43 45 48 43 45 42 42 3F 3C 3A 37 38 38
0x000081F0 35 36 35 35 35 34 34 32 33 31 34 31 33 32 31 33
0x00008200 32 34 32 35 32 32 34 32 33 34 32 32 32 32 34 36
0x00008210 38 38 38 38 38 3A 40 4F 59 67 67 61 51 45 40 3C
0x00008220 3C 3E 3A 36 31 32 36 34 34 32 2E 2C 29 2A 30 33
0x00008230 35 38 3A 38 3B 3B 3F 41 3E 3E 3A 38 35 38 3A 3F
0x00008240 44 4B 51 52 4E 4C 49 43 3B 36 34 31 31 2F 32 2F
0x00008250 2F 2F 2E 2E 2F 2D 2B 2A 29 2B 2B 2D 24 27 26 28
0x00008260 2C 2C 2D 2E 30 32 34 36 3B 3D 41 40 42 41 43 4A
0x00008270 47 4C 4D 52 53 56 58 59 59 59 5B 60 65 68 69 6C
0x00008280 6D 72 72 7A 75 76 7A 7C 79 76 74 7A 79 81 84 89
0x00008290 93 99 9C 9D 9B A2 A1 A4 A5 A2 A2 9E 9F A7 B3 C2
0x000082A0 CE D6 D7 DB D8 D6 D9 D6 D6 D2 D4 CD CC CC C6 C2
0x000082B0 BD C1 BE BA BC B3 AD B2 BA BD BC B8 BB BA B6 B8
0x000082C0 B2 AF A3 99 8B 7F 74 6C 63 5D 52 4F 4E 4E 4D 4B
0x000082D0 4B 4F 4C 4C 52 52 54 57 5B 5A 58 5B 53 4F 4B 46
0x000082E0 46 42 42 41 40 3F 40 40 3F 40 41 43 42 44 46 4C
0x000082F0 5A 5B 59 5B 57 57 57 58 55 53 4D 4D 50 56 54 51
0x00008300 50 52 55 57 5B 5D 59 59 5B 5D 5F 61 62 5D 57 57
0x00008310 53 51 53 4F 4E 4E 4F 4E 56 58 5F 66 69 6E 6F 6D
0x00008320 66 59 4E 48 46 44 44 44 46 46 46 44 44 41 3E 3D
0x00008330 3A 36 38 36 39 38 38 34 35 33 34 33 33 32 33 33
0x00008340 33 32 33 34 33 34 34 34 35 34 32 33 35 32 36 34
0x00008350 30 34 38 36 38 38 39 38 3C 3C 49 57 67 75 7C 6E
0x00008360 5E 4E 44 3D 3D 3A 39 33 33 32 36 36 35 30 2F 2B
0x00008370 2A 29 2C 32 35 35 39 39 3C 3F 41 41 42 3F 3B 3A
0x00008380 39 38 3C 42 44 4B 4D 51 51 4E 49 43 3C 3A 34 34
0x00008390 34 34 34 32 31 2E 2D 2E 2D 2D 28 27 28 28 29 2C
0x000083A0 27 27 28 2A 28 2B 2C 2D 30 34 34 36 38 3B 3C 3F
0x000083B0 3F 44 43 47 4B 4B 4B 50 54 56 58 5B 5D 5C 5D 61
0x000083C0 65 66 6C 6F 70 70 73 78 7A 7A 7A 77 7B 77 7A 76
0x000083D0 7E 80 83 8A 92 97 97 9F 9E 9D A2 A4 A6 A4 A2 9F
0x000083E0 9D A6 B3 C5 D2 D7 DC DA DA D8 DC DC D8 D3 D4 D6
0x000083F0 D2 CE C9 C8 C3 C1 C4 B9 B3 A9 A9 AC B5 BC BD BB
0x00008400 BC BC B6 B5 B6 AE A9 99 8C 80 7A 6E 65 61 55 52
0x00008410 54 51 51 4E 4C 52 52 51 52 55 56 56 58 5B 58 57
0x00008420 55 4C 48 46 43 46 43 43 41 42 41 40 42 41 44 43
0x00008430 43 46 46 4D 52 5C 5A 56 59 57 58 58 55 52 4B 4D
0x00008440 53 55 54 4E 52 50 52 52 5A 5C 58 59 59 5C 5F 5E
0x00008450 5C 5A 57 58 52 53 52 52 50 50 53 56 56 5D 62 66
0x00008460 6E 71 6E 71 68 5B 51 48 46 3E 3C 42 42 44 46 44
0x00008470 42 3E 3E 3C 39 35 38 3A 3C 3C 3B 3C 39 38 35 32
0x00008480 32 32 35 34 34 34 34 35 34 33 33 31 34 37 36 36
0x00008490 34 33 34 34 34 38 38 39 38 38 36 38 3B 41 51 63
0x000084A0 75 80 83 79 68 55 46 3D 38 35 35 31 2F 2F 32 2F
0x000084B0 2E 2F 2D 29 29 2B 2D 31 35 3B 3D 3C 40 42 46 46
0x000084C0 42 43 3E 3D 3A 3A 3C 3E 43 4B 50 53 51 4F 49 42
0x000084D0 3D 3B 3A 3C 3C 40 3D 35 33 30 2E 31 2E 29 27 25
0x000084E0 26 2A 27 28 26 26 29 29 29 2B 2D 2E 30 31 34 34
0x000084F0 37 38 3A 3E 40 44 44 4A 4C 4B 53 55 55 59 5A 5A
0x00008500 5B 5E 62 64 67 69 6B 70 71 73 76 77 77 7A 7B 7B
0x00008510 7A 7D 7A 7C 80 80 83 8C 90 97 9A 9E 9E A0 9F A4
0x00008520 A5 A4 A1 9E 9D A5 B8 C7 D3 D7 DA DB D4 D8 DC D7
0x00008530 D8 D5 D7 D4 D2 CD CD CA C7 C8 C3 BA AB A3 A0 A6
0x00008540 B0 B6 BA BF BD BC BD B8 B3 AF A4 9D 8C 84 7A 75
0x00008550 6A 64 58 59 53 54 56 53 52 53 56 58 57 57 54 59
0x00008560 57 5A 56 51 4F 4B 49 47 44 43 44 44 43 43 44 46
0x00008570 40 42 43 45 45 43 48 4D 57 57 5A 58 57 58 54 57
0x00008580 54 4F 4E 4B 51 53 51 4D 50 50 52 53 56 5B 56 55
0x00008590 59 58 5A 5D 5B 57 54 53 53 4F 51 52 4F 50 53 56
0x000085A0 56 5A 62 66 6E 70 70 6D 66 5C 4B 46 42 42 40 3D
0x000085B0 40 44 43 44 3F 3F 3D 39 35 35 35 3B 3E 40 3F 3E
0x000085C0 3B 38 34 33 31 33 35 36 38 38 35 36 33 33 31 32
0x000085D0 35 39 39 34 37 34 33 34 32 37 3A 3B 39 39 36 3A
0x000085E0 3C 42 55 67 77 83 83 7C 64 50 42 38 33 2E 2E 2A
0x000085F0 2B 2B 2A 2D 2B 2A 2A 2A 27 2A 2C 32 3A 3C 3E 41
0x00008600 45 47 46 49 47 44 43 3E 3F 3F 41 44 49 50 53 53
0x00008610 54 4E 4B 48 42 41 44 46 49 4E 4C 42 3A 32 2F 2D
0x00008620 2A 28 25 25 23 25 26 29 26 29 29 2A 2B 2B 2C 2E
0x00008630 2F 31 34 34 34 38 3B 3D 3F 43 43 48 49 4C 4F 53
0x00008640 55 59 5A 5B 5C 62 64 68 6A 6B 6C 71 70 74 77 73
0x00008650 7A 7B 7E 7F 79 7B 7E 80 80 83 88 8F 98 9B 9C 9E
0x00008660 A1 9C A5 A4 A7 A1 9C 9B 9E A7 B9 C9 D0 D8 DB D9
0x00008670 DB D9 DC D7 D5 D6 D4 CE D0 CD CC C7 C8 C8 C1 BC
0x00008680 AB A0 9E A0 AD B3 BC B9 BB B9 B5 B3 B2 AE A2 98
0x00008690 8E 83 7A 76 71 6A 62 5B 59 58 56 58 57 5A 5A 5D
0x000086A0 5A 5A 5A 5A 59 58 57 55 4E 4D 4B 49 48 48 49 47
0x000086B0 46 48 47 46 48 47 47 46 49 48 4B 50 55 58 58 57
0x000086C0 56 54 57 54 53 4F 4D 4E 4F 51 4E 53 50 53 51 53
0x000086D0 57 58 54 53 57 58 56 55 55 54 52 53 50 4F 4D 50
0x000086E0 4E 51 51 52 54 59 5D 63 64 6C 6A 68 63 56 4D 48
0x000086F0 42 41 3F 3D 3F 42 40 40 3F 3E 3B 39 36 36 36 3B
0x00008700 3E 41 42 3E 3B 37 35 33 32 33 39 39 38 38 38 38
0x00008710 34 32 34 35 3A 38 3A 34 35 32 34 31 32 35 39 3B
0x00008720 3C 3A 3B 3B 3C 45 53 60 71 7B 74 69 59 46 36 32
0x00008730 2B 29 27 26 27 27 27 28 27 27 25 27 28 2A 2F 35
0x00008740 3A 3D 43 46 47 48 4C 49 47 45 45 41 41 42 42 46
0x00008750 4B 51 56 5A 54 51 4D 4A 47 47 49 50 57 58 56 4E
0x00008760 42 33 2F 29 29 24 25 22 23 23 25 25 25 28 28 29
0x00008770 2E 2E 2E 2F 31 33 31 34 36 39 3A 3A 3D 40 44 43
0x00008780 48 49 4D 53 53 56 5A 59 5F 5F 64 67 6A 6B 70 71
0x00008790 73 73 76 78 7A 78 7E 7F 7E 7C 7C 7C 86 86 8B 8E
0x000087A0 92 9A 9C A0 A0 9F A5 A2 A2 9E 99 97 9A A6 B4 C4
0x000087B0 D1 D3 D1 D2 CF D7 CB CE C9 CC CD CA CC C7 C6 CA
0x000087C0 CB BE C2 B8 AA 9E 9B A1 A4 B1 B6 B8 B5 B5 B8 B2
0x000087D0 B0 AA A3 9E 92 8A 82 7F 7A 75 6E 6C 68 64 68 67
0x000087E0 67 6A 6B 68 6C 68 67 67 64 61 5D 5B 59 56 55 56
0x000087F0 52 51 4E 53 51 53 53 52 51 4F 51 51 4F 53 55 56
0x00008800 5B 5C 5F 5C 5B 59 58 56 55 54 51 52 53 53 54 52
0x00008810 53 52 53 55 55 57 56 54 58 59 59 58 56 57 54 54
0x00008820 51 52 53 53 54 50 53 52 54 57 59 5D 61 62 61 63
0x00008830 5D 54 4C 43 40 3F 40 3E 40 40 40 40 3D 3C 38 36
0x00008840 36 38 39 3B 3F 42 41 3C 3A 38 33 34 36 38 3A 39
0x00008850 3C 3A 38 37 32 35 33 36 38 3A 3A 38 36 33 33 32
0x00008860 35 3A 39 3B 3C 38 39 39 3A 41 4C 5D 64 68 62 58
0x00008870 4A 3C 2E 2B 27 24 25 22 24 25 24 25 24 24 26 27
0x00008880 2B 2B 31 38 3D 40 47 46 49 4A 49 49 49 48 45 44
0x00008890 42 43 48 4A 4D 52 55 53 54 51 50 4A 46 47 4B 51
0x000088A0 5A 5D 5B 51 43 32 2D 28 25 23 21 22 20 22 22 22
0x000088B0 29 26 28 2A 2C 2C 2D 2E 2F 31 34 35 36 39 38 3D
0x000088C0 3E 41 42 42 46 4B 4D 4E 52 54 59 59 5B 62 60 67
0x000088D0 69 6E 6E 6E 72 72 73 7A 7A 7A 7D 7D 80 7F 7F 82
0x000088E0 81 86 8A 92 97 9D 9B 9E A2 9F A2 A1 9E 99 8F 8F
0x000088F0 93 A2 AC BC C5 C5 C0 C6 C1 C0 C0 C3 BF C1 C2 BD
0x00008900 B9 BB C1 BF C2 C6 C8 C3 BC B4 AE AE B8 BC C6 C5
0x00008910 CA C7 C2 C0 BA BB B5 B2 A7 A3 9D 9A 95 90 8D 8B
0x00008920 84 86 83 85 87 82 84 83 83 7F 80 7F 76 74 71 6D
0x00008930 6A 6B 68 6A 66 64 67 66 66 65 68 62 62 62 5E 5F
0x00008940 5F 5F 5E 63 65 67 65 64 5F 5F 5C 60 60 5A 56 58
0x00008950 57 5B 5C 58 57 56 55 57 57 5A 56 58 5A 59 5B 5C
0x00008960 59 57 57 59 50 51 56 55 54 54 53 55 54 54 54 59
0x00008970 5C 5B 5A 58 51 4E 46 43 3C 3B 3C 3F 3F 40 3F 3E
0x00008980 3B 39 35 35 35 36 3B 3D 3E 40 3D 3C 39 36 33 36
0x00008990 36 39 38 3B 3B 39 36 35 34 36 37 38 39 3A 3A 36
0x000089A0 32 33 33 35 38 39 3B 3B 3B 3C 39 39 3A 3D 44 4C
0x000089B0 53 52 4E 44 3D 31 2B 28 26 23 22 22 22 23 24 23
0x000089C0 23 28 27 2A 2C 2E 32 39 3F 46 47 49 49 4B 48 4A
0x000089D0 48 47 45 48 45 44 47 4B 4E 52 52 56 54 51 4E 4A
0x000089E0 48 46 4C 51 56 57 4F 47 3C 2D 27 23 21 20 20 20
0x000089F0 1E 1D 1F 20 25 28 2A 29 2C 2D 2E 2F 32 33 34 33
0x00008A00 36 36 3A 3C 3D 3F 42 43 46 49 4B 4D 51 51 54 5A
0x00008A10 59 5E 62 67 6A 6B 6E 71 73 71 76 74 79 79 7B 7F
0x00008A20 7F 80 84 87 87 8C 91 93 92 99 9B 9E 9E 9F A2 A1
0x00008A30 9C 93 8F 8E 8F 9A A5 AC B9 B6 B5 B3 B3 B1 AF AF
0x00008A40 B4 B4 B2 AF AB AB B1 B8 C7 D2 E1 E4 E4 DA D5 D5
0x00008A50 DC E0 E4 E7 EA E6 D7 DE DE DC D8 D4 CF C2 C1 C0
0x00008A60 BB B9 B8 B0 AF AB A9 AA AB A9 A7 A9 A6 9E 9D 99
0x00008A70 94 90 8C 86 84 83 7E 7E 7B 7C 7D 7C 7B 7D 7B 76
0x00008A80 76 73 74 71 6E 71 6F 70 6F 72 6F 6C 69 66 66 67
0x00008A90 63 60 5E 5E 61 65 5E 5C 5A 5B 5B 5B 5A 5D 5E 5B
0x00008AA0 5D 5C 5E 5B 5B 58 59 5B 56 57 56 56 54 55 55 53
0x00008AB0 53 53 53 54 53 52 52 4F 4C 48 45 3F 3B 3B 3B 3D
0x00008AC0 3C 3C 3D 3A 39 35 35 32 33 34 3A 3A 3C 3D 3D 39
0x00008AD0 39 32 36 36 37 3B 3B 3C 3B 34 35 38 35 3A 3A 3C
0x00008AE0 3C 3A 39 35 33 32 33 38 3B 3B 3B 3E 3A 39 36 36
0x00008AF0 36 39 3B 3D 42 42 3F 35 32 2C 28 27 26 23 22 22
0x00008B00 20 24 24 24 25 27 29 2A 2C 31 33 3B 40 44 47 48
0x00008B10 47 49 45 46 43 45 44 45 44 44 46 46 4A 4E 50 51
0x00008B20 53 4D 4B 48 44 43 44 48 47 48 44 3B 31 28 21 20
0x00008B30 1E 1D 1C 1B 1D 1B 1C 1E 28 27 28 2B 2B 2D 2C 2F
0x00008B40 31 32 34 34 36 36 3C 3B 3B 40 44 46 49 48 4B 4F
0x00008B50 4E 52 53 58 57 5D 62 62 6A 6D 6E 6E 71 74 74 76
0x00008B60 75 7B 7B 7D 81 80 85 84 8B 8A 90 8E 97 9B 9D 9D
0x00008B70 9E A0 A3 9D 99 94 8D 90 91 97 A1 A4 AC AB A6 A7
0x00008B80 A8 A8 A7 A2 9E A4 A9 A4 A3 A4 AB AF CC EC FF FF
0x00008B90 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00008BA0 F8 ED F0 EB E7 E3 E3 E1 DE D6 D5 D5 D1 CF CE CC
0x00008BB0 C5 C1 B9 B4 B3 AF AD A6 9F 9F 9A 9C 99 92 92 94
0x00008BC0 92 8C 90 8A 88 88 82 85 7F 80 81 7B 7E 76 7C 76
0x00008BD0 72 70 6E 6E 6C 6A 67 66 6A 67 6A 68 61 62 5F 5E
0x00008BE0 5E 5E 5F 5E 5C 60 5F 5E 5F 5E 5A 5A 5B 5B 58 5A
0x00008BF0 58 57 56 52 4D 50 4F 4D 4D 4D 4B 47 43 42 3F 3D
0x00008C00 39 39 39 3C 3B 38 37 35 35 34 32 34 34 34 38 38
0x00008C10 36 35 38 38 36 35 35 35 36 3A 38 39 37 36 34 38
0x00008C20 39 36 38 39 35 35 35 33 33 32 35 36 39 3A 38 3C
0x00008C30 37 39 36 39 36 36 38 38 35 36 34 2F 2B 2A 27 25
0x00008C40 24 23 22 21 22 22 22 25 25 28 29 2B 2C 2F 34 39
0x00008C50 3F 3F 42 45 43 47 46 44 41 41 3E 40 43 3F 40 41
0x00008C60 44 47 49 48 4A 47 47 44 3F 41 3E 3B 3C 3C 38 2F
0x00008C70 2A 23 21 1D 1E 1C 1D 1C 1C 1D 1C 1E 26 29 2A 2A
0x00008C80 2C 2C 2D 31 32 32 34 36 33 39 3A 3C 3E 41 41 44
0x00008C90 45 48 4C 4D 4E 52 55 55 59 59 5C 61 64 67 69 6F
0x00008CA0 6E 72 73 75 75 7A 7F 7E 7F 85 83 89 87 8B 8E 91
0x00008CB0 98 9C 9D 9E 9E A0 9F 9C 94 91 94 94 94 9B 9B A0
0x00008CC0 A0 A3 A4 9E 9E 9D 98 9C 9D 9D 99 98 98 9A 9F B0
0x00008CD0 CE F3 FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00008CE0 FF FF FF FF FF FF FF FF FE FF FF FF FF FB F7 F2
0x00008CF0 F8 ED EE EB E2 DD D6 D2 CD C9 C1 BD BF B9 B6 B0
0x00008D00 AE AA A5 A8 AA A7 A6 A0 9B 98 93 91 8D 8E 8B 8B
0x00008D10 8E 88 86 80 7E 79 79 74 73 71 6E 72 72 71 6E 6F
0x00008D20 68 69 66 64 61 61 63 61 60 62 62 61 61 5F 5E 5A
0x00008D30 5D 5E 5C 59 5C 59 56 52 50 4C 4C 48 47 44 43 3E
0x00008D40 3A 3A 3B 39 38 38 39 38 39 36 36 32 33 32 33 32
0x00008D50 35 36 35 34 34 32 36 34 34 34 36 39 36 38 33 34
0x00008D60 35 36 36 36 34 3A 39 38 38 32 33 34 34 33 33 36
0x00008D70 38 39 36 38 38 36 38 39 35 35 34 32 35 33 33 2D
0x00008D80 2E 2C 29 29 28 24 26 23 23 23 24 25 25 25 28 2A
0x00008D90 2C 2D 32 34 38 3C 3C 3D 3F 3F 3F 3B 3A 3C 3B 3B
0x00008DA0 3A 3B 3A 3D 3C 3E 3D 40 40 3E 40 3E 3A 3A 35 36
0x00008DB0 31 30 2D 2B 26 22 22 1F 21 20 1F 1E 1F 1D 1E 22
0x00008DC0 27 29 29 2B 2D 2C 2E 2F 30 33 33 34 34 39 3B 39
0x00008DD0 3E 3E 42 43 42 47 4B 4C 4D 4F 54 55 57 59 5B 5F
0x00008DE0 5D 64 65 6A 6C 6D 70 70 74 78 76 7B 7E 82 86 88
0x00008DF0 86 8E 8F 90 97 9B 9D 9B 9E 9E 9F 99 93 99 94 98
0x00008E00 99 9C 9F 9E A1 A0 9D 94 94 9A 94 94 90 91 8F 94
0x00008E10 95 92 9C B2 DB FF FF FF FF FF FF FF FF FF FF FF
0x00008E20 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00008E30 FF FF FF FF FF FF FF FF FE FC F4 ED E2 E3 DD D4
0x00008E40 D2 C8 CC C3 BF C1 BA B5 B5 B5 B1 AF AC A1 A2 9F
0x00008E50 9F 9A 98 99 94 8F 8C 86 86 84 7E 7B 79 74 76 76
0x00008E60 76 71 76 73 6F 6E 6A 6A 66 64 65 66 65 64 60 64
0x00008E70 64 5E 60 5F 61 60 61 5D 5A 5A 59 54 50 4D 4D 46
0x00008E80 41 40 3C 3A 35 36 35 38 37 37 39 39 39 36 34 32
0x00008E90 31 32 33 35 35 36 35 33 33 31 32 32 36 36 38 37
0x00008EA0 35 36 33 33 32 33 35 38 34 39 39 35 33 33 32 32
0x00008EB0 31 33 32 38 35 36 35 34 35 33 38 34 34 34 31 32
0x00008EC0 34 38 39 39 34 33 31 2D 28 27 25 24 24 22 22 23
0x00008ED0 25 27 29 2A 2A 2C 30 32 36 36 3A 3B 3C 3D 3A 39
0x00008EE0 37 35 38 38 35 34 32 33 34 34 36 36 39 34 38 35
0x00008EF0 36 34 34 31 2D 2D 29 27 26 26 25 25 25 24 22 24
0x00008F00 22 22 21 23 27 29 2B 2B 2F 2E 30 2F 2F 32 35 35
0x00008F10 36 39 3A 3C 3C 3F 3E 41 45 47 4B 4D 4E 50 53 56
0x00008F20 57 58 59 5B 5D 5F 61 65 6C 6B 70 6F 71 76 77 7B
0x00008F30 7F 82 83 83 84 89 8C 90 92 9B 9C 9E A1 9D 9B 9A
0x00008F40 94 9A 9B 9E 9F A3 9F 9F 9D 9A 99 91 91 90 92 8F
0x00008F50 8E 8E 8F 8B 92 91 9B AC E2 FF FF FF FF FF FF FF
0x00008F60 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00008F70 FF FF FF FF FF FF FF FF FF FF FF FF FF FB F4 F6
0x00008F80 F1 EB E3 E4 DC D7 D6 CF CC C9 C1 C0 BA B9 BA B5
0x00008F90 B1 AA A9 A2 A0 9D A0 9B 95 94 8E 8A 88 85 80 7C
0x00008FA0 78 77 76 75 77 79 76 73 72 72 6D 6B 6B 68 68 65
0x00008FB0 66 65 63 64 63 61 63 63 60 60 5E 5E 5F 5B 56 53
0x00008FC0 51 4B 48 44 42 3B 39 35 34 33 34 33 38 39 39 38
0x00008FD0 38 35 34 33 33 35 35 35 35 33 33 30 32 32 32 33
0x00008FE0 35 35 35 35 35 36 33 33 35 33 35 38 38 38 38 36
0x00008FF0 34 34 33 32 32 34 36 34 36 38 34 35 35 38 35 38
0x00009000 36 35 35 36 3C 42 48 4A 47 41 3A 33 2D 2B 26 25
0x00009010 23 23 24 28 25 28 27 28 2A 2A 2B 2F 32 39 3E 43
0x00009020 41 3F 3B 35 36 36 35 35 33 2F 2E 2E 2F 2C 2F 30
0x00009030 2E 32 32 33 35 32 2F 2F 2D 29 28 28 27 28 2A 28
0x00009040 29 2A 29 29 27 28 27 27 29 28 2A 2D 2D 2F 2F 30
0x00009050 31 33 32 36 38 36 3B 3C 3D 3F 3F 42 45 49 4A 4C
0x00009060 4C 52 51 55 55 58 5A 5A 5E 61 63 64 66 67 6A 6C
0x00009070 71 76 76 7A 7E 7C 82 81 85 8C 8B 90 92 9B 9A 9D
0x00009080 A1 9E 9B 98 95 98 9D 9F A2 A2 9E 9F 9C 92 90 8D
0x00009090 8D 86 8C 89 89 8B 8A 8B 8C 94 9A B8 EA FF FF FF
0x000090A0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x000090B0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x000090C0 FF FF FF FE F8 F1 EA E1 DF D9 D3 D2 CB C7 C1 C0
0x000090D0 C0 B6 B9 B2 B2 AD A6 A3 A2 A1 9A 9D 97 8F 8C 8C
0x000090E0 86 87 7E 7C 7D 77 7B 76 75 76 77 75 74 71 6D 6C
0x000090F0 6B 67 68 68 64 66 63 63 64 62 62 61 60 5E 5E 5F
0x00009100 60 5B 58 54 50 4C 47 43 41 3A 34 31 2F 31 32 36
0x00009110 38 38 38 38 32 39 36 39 37 34 35 38 31 31 31 31
0x00009120 31 33 35 35 34 35 34 34 34 34 34 36 35 38 38 39
0x00009130 39 37 37 33 35 35 35 33 33 34 36 36 35 35 39 37
0x00009140 3A 39 39 38 38 38 39 3C 44 4F 5A 5B 5A 52 46 3C
0x00009150 33 2D 27 24 23 24 23 26 25 26 25 27 29 2A 2B 30
0x00009160 34 3E 43 4B 4C 47 40 3A 35 36 37 34 33 2D 2D 2A
0x00009170 28 28 2B 2A 2D 2E 30 32 32 33 33 31 2D 2D 2C 2B
0x00009180 2A 2B 2A 2A 2A 29 29 2A 29 2A 27 27 2A 28 2B 2A
0x00009190 2C 2F 32 33 31 2F 32 32 37 39 39 3B 3E 3F 42 44
0x000091A0 45 47 4A 4B 4E 50 53 54 54 56 5D 5B 5E 5C 5F 62
0x000091B0 66 68 68 6A 6B 6F 74 76 79 7B 7D 81 86 88 88 90
0x000091C0 94 9C 9B 9A 9B 9B 9A 99 99 9A 9E A1 A1 9E 99 99
0x000091D0 91 8D 89 86 83 7C 7B 7B 7D 82 83 87 88 8C 9E B6
0x000091E0 EC FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x000091F0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009200 FF FF FF FF FF FF FF F0 F4 EB E6 DD DA D6 D0 CB
0x00009210 CB C7 C1 BF BB B9 B9 AE AD AB A8 A3 9E A2 9B 94
0x00009220 91 8E 8B 8A 87 7E 80 7F 77 79 74 76 79 7A 76 77
0x00009230 75 72 6E 6F 6A 68 67 64 65 64 66 64 62 62 5E 60
0x00009240 60 5F 5F 5B 5D 5B 5D 55 53 4F 4A 47 3F 39 33 31
0x00009250 2F 31 34 35 39 37 37 35 36 39 39 38 3B 35 38 34
0x00009260 32 31 2F 32 32 36 35 3A 37 38 34 33 31 34 35 37
0x00009270 3A 3B 3B 3A 3B 36 33 33 35 34 37 36 35 35 38 36
0x00009280 34 34 38 3B 39 3B 38 37 39 39 3F 44 4E 5F 66 6D
0x00009290 68 5D 51 42 38 2E 28 24 24 21 23 25 25 25 28 27
0x000092A0 29 2B 2C 32 3A 45 4E 5A 5C 57 4A 40 39 33 36 32
0x000092B0 2E 2A 26 27 27 27 27 28 2B 2D 2D 31 36 35 36 33
0x000092C0 33 32 31 2D 2D 2C 2C 2B 2B 2B 2A 29 2A 2B 28 27
0x000092D0 2A 29 2C 2B 2E 2E 2D 32 2F 32 33 35 32 36 3C 3C
0x000092E0 3F 3F 3F 45 44 48 48 4A 4E 4D 50 52 54 57 59 5C
0x000092F0 5D 5D 61 63 62 64 69 68 6C 6D 6C 71 74 79 79 7C
0x00009300 80 84 85 8A 8F 9A 91 9C 9B 98 96 92 90 97 9C 9E
0x00009310 9E 98 90 90 89 82 80 75 6D 67 64 66 69 72 7A 7E
0x00009320 82 8C 9A BB F7 FF FF FF FF FF FF FF FF FF FF FF
0x00009330 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009340 FF FF FF FF FF FF FF FF FF FF F9 EE ED E3 E0 D7
0x00009350 CF D2 CD C7 C5 C5 C3 BE B8 B2 B2 AE AC AC A7 A2
0x00009360 9B 9A 91 93 8B 8A 87 87 82 82 82 7E 77 78 77 78
0x00009370 78 79 76 77 75 6F 6E 6D 6B 69 67 66 62 62 65 63
0x00009380 62 63 62 63 5E 62 5D 5E 5B 5B 58 56 52 4D 4C 47
0x00009390 41 3B 33 31 2C 2F 35 38 38 37 3B 3A 3B 38 3A 3E
0x000093A0 3E 3D 3A 38 35 31 2F 32 34 38 3A 3A 38 36 36 34
0x000093B0 34 34 38 3A 3F 3F 3C 3B 39 36 34 34 38 38 3C 3C
0x000093C0 39 38 39 35 38 38 39 3A 3C 3D 3B 39 39 3B 3F 4A
0x000093D0 58 68 75 7A 6F 65 53 42 34 2E 2A 24 21 21 22 22
0x000093E0 24 23 26 28 28 2B 2F 35 41 4D 5A 67 69 66 55 46
0x000093F0 3B 32 32 2F 2D 2A 27 24 25 24 27 25 29 29 30 34
0x00009400 3A 3A 3A 39 39 35 33 33 32 30 2E 2A 2A 29 28 28
0x00009410 29 28 28 29 2A 2B 2C 2B 2D 30 2F 30 31 31 34 35
0x00009420 36 37 3A 3C 41 41 44 42 43 46 48 4C 4E 4F 51 51
0x00009430 53 58 5C 5A 5C 61 61 64 64 67 66 68 68 6A 6E 6F
0x00009440 6F 75 75 79 7A 7D 82 86 8B 8F 91 94 99 99 95 97
0x00009450 91 96 99 9D 92 90 86 7F 82 78 6F 68 5E 56 54 53
0x00009460 58 5E 6F 75 7F 84 93 BB F4 FF FF FF FF FF FF FF
0x00009470 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009480 FF FF FF FF FF FF FF FF FF FF FF FF FA F1 EE ED
0x00009490 E0 DA D3 D1 C8 C5 C3 C3 BF C1 C0 BA B5 B2 AE AC
0x000094A0 AA A9 A5 A0 9B 94 91 90 8A 8A 84 83 83 80 7F 7C
0x000094B0 7A 74 77 79 7C 7A 75 75 72 72 6C 6B 66 65 64 64
0x000094C0 61 5F 62 61 61 61 63 63 5E 5E 5E 5E 5B 5B 58 57
0x000094D0 57 52 50 48 43 3B 36 2E 2B 30 33 33 38 36 3B 39
0x000094E0 3A 3A 3E 3D 40 3C 3A 39 38 35 38 35 38 3C 3F 3C
0x000094F0 3B 37 38 38 39 39 3B 3F 42 41 3E 3B 38 36 38 36
0x00009500 36 39 3D 3A 39 3A 39 3A 3C 3A 3A 3B 41 40 3C 39
0x00009510 37 3A 3F 4D 5B 6A 71 75 70 61 51 40 33 2B 27 23
0x00009520 1F 21 20 21 23 23 26 29 29 2C 30 35 43 53 63 6D
0x00009530 72 6A 5A 4B 3A 33 30 2E 2A 26 25 23 23 23 25 27
0x00009540 27 2D 31 34 3B 3B 3C 3D 3A 39 36 33 36 32 30 2D
0x00009550 29 29 2A 29 2A 2C 2D 2F 28 2D 2D 2D 2D 2F 31 30
0x00009560 32 32 32 35 38 3A 3A 3C 41 41 42 44 46 44 49 4A
0x00009570 4D 4E 4F 50 54 57 56 58 5C 5F 63 63 63 63 65 68
0x00009580 6A 69 6B 6E 6C 72 72 75 74 7B 7B 7A 81 84 88 90
0x00009590 90 93 8F 92 92 97 98 99 92 8C 84 7A 7A 72 6A 5D
0x000095A0 54 4A 42 43 48 5A 67 74 7B 82 98 BC F8 FF FF FF
0x000095B0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x000095C0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x000095D0 F6 ED EE E8 DF DA D2 C7 C6 C4 BB BD BC BB BC B5
0x000095E0 B5 B1 A9 A5 AB A9 A3 9F 9A 94 8F 8F 88 85 83 80
0x000095F0 84 82 83 80 7E 7B 76 7B 78 7C 7A 77 75 71 6F 6F
0x00009600 67 68 66 62 60 60 62 61 62 5F 5E 5C 5E 60 5C 5F
0x00009610 5C 5C 59 58 55 51 50 4B 45 3E 36 31 2D 31 34 38
0x00009620 39 37 36 3B 3C 3D 3F 3F 41 3F 3D 39 3A 39 3B 3B
0x00009630 3A 3E 3F 3E 3C 3B 3B 3C 3D 40 41 43 44 44 3F 3C
0x00009640 39 38 3B 3B 3B 3E 3B 3D 3C 39 3B 3E 3F 3F 3F 3F
0x00009650 3F 3E 3B 39 38 3B 42 4D 55 66 6A 6D 66 59 4A 3D
0x00009660 31 29 24 24 20 1F 21 22 23 26 26 29 2A 2D 30 39
0x00009670 43 53 63 6F 6B 65 55 44 35 2F 2B 29 24 21 22 20
0x00009680 22 22 23 26 27 29 2F 38 3C 3C 3E 3F 3B 3C 3A 39
0x00009690 38 34 33 32 2E 2E 2F 2D 2F 2F 33 34 29 29 2C 2D
0x000096A0 2E 2F 2F 32 33 35 36 39 38 39 3D 3D 3E 43 42 42
0x000096B0 42 46 45 4E 4E 4F 54 4F 52 59 59 5C 5C 60 5F 67
0x000096C0 63 63 67 69 66 68 69 6C 71 72 71 73 74 76 7A 76
0x000096D0 7E 7E 81 83 85 89 89 8B 8A 93 97 94 90 85 7E 79
0x000096E0 75 71 67 5A 4D 42 3A 3A 3F 53 62 71 75 7D 92 BB
0x000096F0 F4 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009700 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009710 FF FF F9 F6 EF EA E3 DD DF DA CC C6 C1 BF B9 B8
0x00009720 B4 BA C1 B9 B4 AD AE AE AB AA A1 A0 9B 98 91 8E
0x00009730 8D 89 87 83 84 83 82 80 7D 7B 7B 7E 7C 7C 7C 75
0x00009740 74 72 71 70 6C 64 64 5F 5F 5E 61 5E 5E 5E 60 5F
0x00009750 5F 5F 5E 5D 5A 59 59 59 56 56 52 4A 45 3D 38 2E
0x00009760 2E 30 34 38 33 34 37 3A 3C 3F 3F 40 42 3F 3F 3C
0x00009770 3C 3E 41 3F 41 3D 3F 41 3F 3E 3D 3D 41 45 44 46
0x00009780 45 47 3F 3D 3A 3A 3B 3C 3D 3C 3D 3D 3B 3A 3C 40
0x00009790 42 44 43 43 3F 3C 3A 3B 39 39 3E 47 4F 59 5D 5E
0x000097A0 5A 51 43 39 2E 26 27 25 24 23 23 24 24 27 27 28
0x000097B0 2C 2E 2F 34 3E 4D 58 61 61 55 47 39 2E 28 26 23
0x000097C0 24 20 1E 20 1E 1F 22 23 27 2A 2E 35 35 3A 39 3A
0x000097D0 3A 3A 3A 3A 36 35 38 35 34 33 31 33 32 30 32 30
0x000097E0 2A 2A 2B 2E 2F 2E 2F 31 32 33 35 36 3A 3A 3D 3F
0x000097F0 42 43 43 44 44 47 49 49 51 4E 50 54 54 57 57 59
0x00009800 5B 5E 5F 61 64 65 65 65 65 68 68 69 6B 6E 73 73
0x00009810 72 76 76 78 7B 78 7A 7C 81 85 81 89 8A 93 92 91
0x00009820 8B 7F 76 75 71 6B 66 59 49 41 38 36 3F 4F 64 6E
0x00009830 73 7E 8E B9 FE FF FF FF FF FF FF FF FF FF FF FF
0x00009840 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009850 FF FF FF FF FF FF FD F9 F3 ED E4 E1 DF D9 CF CE
0x00009860 C2 BF BB BB BD BF C0 BC B4 B9 B0 B2 AD AA A8 A6
0x00009870 A1 9A 91 8D 8D 88 8B 88 85 84 83 86 82 80 82 82
0x00009880 7D 7A 7B 78 75 72 73 6D 6B 65 61 63 60 5D 5A 5D
0x00009890 60 5F 5E 5E 5F 5F 5E 5B 5A 5B 5A 5B 57 55 4E 4D
0x000098A0 49 41 34 2F 2D 2F 34 35 36 39 39 3C 3D 3D 41 43
0x000098B0 43 44 40 42 40 41 41 3F 42 3F 42 42 41 43 42 43
0x000098C0 43 46 46 42 45 42 3F 3F 3E 3C 3B 3C 3A 3B 39 3A
0x000098D0 3A 3C 3E 43 43 47 46 44 3F 3D 38 3B 38 38 3C 43
0x000098E0 46 4A 4E 4E 4C 46 3C 35 2E 28 27 28 26 28 26 27
0x000098F0 27 29 29 2B 2C 2D 31 33 3C 44 4D 50 4C 45 39 31
0x00009900 28 24 22 21 22 1E 1F 1E 20 20 22 25 25 28 2D 32
0x00009910 36 39 3A 38 36 35 37 34 37 38 38 39 39 3A 33 32
0x00009920 2F 2E 2B 26 2A 2B 2C 2B 2C 2E 30 32 33 34 38 36
0x00009930 39 38 3E 3D 3E 40 43 46 46 49 4B 4B 4E 4E 52 52
0x00009940 52 56 59 5A 5C 5F 5F 68 64 65 67 66 65 68 67 6C
0x00009950 6F 6E 71 72 73 76 73 73 7B 74 79 79 7A 7B 81 7F
0x00009960 8B 8F 90 93 86 7D 74 74 71 6A 62 57 49 3B 35 34
0x00009970 3A 4C 60 6D 77 7D 8C BD FE FF FF FF FF FF FF FF
0x00009980 FF FF FF FF FF FF FF FF FC FF FF FF FF FF FF FF
0x00009990 FF FF FF FF FF FF FF FF FF FF FA FB ED F2 E8 EA
0x000099A0 E4 DB D6 D4 CC C4 C3 C1 C3 C2 C3 BD BD BE B4 B4
0x000099B0 B5 B1 AC AA A8 9D 99 94 92 8D 8C 89 8B 89 89 87
0x000099C0 86 86 82 85 7C 7F 7D 79 73 73 71 6D 68 66 61 61
0x000099D0 61 61 5E 5E 61 5F 5F 5F 5F 5F 5D 5E 5B 5B 5A 57
0x000099E0 5A 58 55 4F 46 40 35 2D 2A 2E 30 36 36 39 3B 3B
0x000099F0 3E 40 41 44 44 47 47 48 45 43 44 43 44 46 44 45
0x00009A00 47 46 47 47 47 47 44 41 41 42 41 3E 3C 3B 3D 3A
0x00009A10 34 38 37 36 38 3C 3E 44 46 45 44 42 3E 3F 3C 39
0x00009A20 3A 38 39 3C 3E 42 43 44 43 3C 39 32 2F 2E 2B 2C
0x00009A30 2E 2E 2D 2C 2B 2B 2B 2E 2C 2F 2F 34 38 3C 3C 3F
0x00009A40 3B 35 2E 29 26 23 22 23 22 22 22 1F 22 23 23 25
0x00009A50 29 2B 2E 30 34 39 36 36 34 34 36 34 34 34 34 35
0x00009A60 34 33 30 2C 29 24 20 1D 2A 2C 2C 2C 2E 2E 30 33
0x00009A70 32 35 39 37 3A 3C 3D 3F 3E 44 43 46 47 46 4A 4F
0x00009A80 4F 4D 50 52 56 56 55 5B 5B 5F 61 62 66 63 66 66
0x00009A90 65 67 6A 6A 6A 6E 71 70 71 73 74 75 77 74 75 74
0x00009AA0 76 77 80 82 89 8E 8D 93 84 79 76 6F 71 6D 63 56
0x00009AB0 4A 3F 35 35 3C 4B 5C 6F 74 81 90 BF FF FF FF FF
0x00009AC0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009AD0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009AE0 FF FB FA F1 EF E5 E1 DB D9 D2 CD CA C6 CA C6 C6
0x00009AF0 C5 BE BC B8 B5 B4 B2 AA A8 A4 A3 9B 9D 92 8E 8C
0x00009B00 8B 89 8B 88 85 84 83 82 82 7D 7B 78 78 76 6F 70
0x00009B10 6B 68 65 62 5E 5D 5E 5F 5E 5D 5D 5F 60 5F 5F 5D
0x00009B20 5B 5B 5B 5B 58 55 52 4E 4D 41 39 32 2D 2F 31 35
0x00009B30 38 3C 3E 3D 3F 41 42 46 42 47 49 48 49 46 45 43
0x00009B40 45 43 44 47 4A 4B 4A 47 48 46 44 3F 41 3F 3D 40
0x00009B50 3D 3C 3A 35 33 33 32 35 38 3E 40 43 46 46 47 42
0x00009B60 41 3F 3D 3B 3C 39 3A 39 35 3C 3D 3D 39 38 33 33
0x00009B70 30 2F 32 33 32 32 32 2D 2B 2D 2D 2C 2F 2D 30 32
0x00009B80 33 35 34 35 31 2E 29 28 24 25 22 23 23 25 25 23
0x00009B90 22 23 24 26 27 29 2E 2F 35 38 39 39 37 36 36 36
0x00009BA0 33 31 31 2E 2D 2C 27 24 22 1E 1C 1A 28 29 2D 2C
0x00009BB0 2D 2E 31 30 31 34 36 39 3A 3B 3C 3E 42 44 43 46
0x00009BC0 48 49 4B 4E 4C 50 51 52 52 55 58 58 5D 62 60 62
0x00009BD0 64 64 66 66 66 67 68 6C 6E 6D 6F 73 6F 72 6E 71
0x00009BE0 72 75 71 71 75 7A 7D 82 88 8F 92 8E 83 7F 7A 70
0x00009BF0 70 6B 65 58 47 3E 36 36 3B 47 5A 6C 75 83 98 C0
0x00009C00 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009C10 FF FE FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009C20 FF FF FF FC FB FF FB F3 F2 EA E5 E0 DD D9 D2 D0
0x00009C30 CE CC C5 C5 C6 C3 BE BB B5 B6 B2 B2 AB A6 A5 A2
0x00009C40 9D 99 90 91 8D 8C 8C 89 87 86 87 81 80 7D 7B 77
0x00009C50 76 73 71 72 6B 66 66 62 62 61 5F 61 60 5F 5E 60
0x00009C60 5E 63 61 63 5D 5B 5C 59 59 57 57 53 4B 42 38 31
0x00009C70 2E 2E 33 33 39 3A 3C 3B 3E 3F 42 45 40 43 45 45
0x00009C80 46 46 45 46 46 45 43 45 47 49 47 45 44 3F 3F 3F
0x00009C90 3A 3B 3C 3C 3D 3B 36 34 31 32 30 33 36 3D 43 45
0x00009CA0 48 4B 4A 4A 44 44 45 40 3D 3F 3C 3B 38 38 3B 39
0x00009CB0 39 34 35 33 35 34 35 39 39 3B 39 33 32 31 2D 2E
0x00009CC0 31 2D 2C 2E 30 33 2F 2E 29 2A 27 26 26 25 25 25
0x00009CD0 27 25 25 24 23 23 23 26 26 2B 2D 32 33 35 39 39
0x00009CE0 39 3C 38 38 32 30 2D 2B 27 24 22 21 1E 1D 1E 1C
0x00009CF0 2A 2C 2E 2C 30 2E 31 32 33 36 36 3A 38 3C 3A 3F
0x00009D00 42 42 44 46 48 49 4A 4A 4D 51 52 52 52 56 59 57
0x00009D10 5B 5C 5C 61 61 66 64 65 67 67 66 6E 6B 6D 70 6C
0x00009D20 6C 6F 6E 6D 70 72 71 73 73 75 7C 82 8B 8D 93 8D
0x00009D30 85 7A 77 74 71 6E 65 5A 4A 3C 35 33 38 43 52 65
0x00009D40 73 82 9B D3 FF FF FF FF FF FF FF FF FF FF FF FF
0x00009D50 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009D60 FF FF FF FF FF FF FF FF FF FF FD F9 F1 EF EC E8
0x00009D70 E2 DC D9 D2 CF CE C7 C9 C5 C5 BD B9 BB B4 B4 AE
0x00009D80 AC A8 AA A5 9F 9C 9C 93 91 8F 8D 8B 89 86 85 83
0x00009D90 7F 7D 7D 77 78 71 73 6F 6D 68 69 66 61 5F 5E 5E
0x00009DA0 5F 62 61 62 62 62 61 5F 60 5B 5C 5B 5B 58 57 55
0x00009DB0 4B 46 3A 32 30 2F 33 36 37 38 3B 3C 3E 3D 41 43
0x00009DC0 42 42 40 42 41 41 40 42 44 45 46 47 49 48 45 42
0x00009DD0 3C 3C 3C 3A 39 3A 3A 3A 3C 36 36 34 32 33 32 36
0x00009DE0 39 41 46 4D 50 51 53 4D 4C 4D 4B 49 43 41 40 3D
0x00009DF0 3E 3C 40 42 3F 3E 39 39 39 3C 3F 41 43 42 40 3C
0x00009E00 38 34 34 32 30 2D 2E 2C 2E 2F 2F 2E 2B 2B 29 2A
0x00009E10 27 29 29 27 25 24 24 21 20 22 21 24 24 29 2C 30
0x00009E20 33 38 3A 3A 3B 39 3B 36 34 31 2D 2C 26 26 23 21
0x00009E30 1E 20 23 24 2C 2C 2C 2C 2E 31 31 35 35 33 36 36
0x00009E40 3A 3C 3C 3E 3D 42 43 45 48 4A 4C 4B 4E 50 50 52
0x00009E50 51 54 54 59 58 59 5E 60 62 64 64 66 67 66 68 6B
0x00009E60 6A 6C 6A 70 70 6D 6C 6F 6F 6D 70 70 76 78 7C 82
0x00009E70 89 8C 90 8D 84 7D 79 72 74 6F 68 56 4B 3D 36 36
0x00009E80 36 40 49 58 68 7B A4 D4 FF FF FF FF FF FF FF FF
0x00009E90 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009EA0 FF FF FF FF FF FF FF FF FF FF FF FF FF F2 F1 F3
0x00009EB0 F2 EF E9 E6 E4 DC D7 CF CB CB CA C7 C4 BE BD BE
0x00009EC0 B9 B6 B2 AC AA A9 A4 A2 9F 9C 9B 98 92 8D 8B 8C
0x00009ED0 8A 85 83 82 80 7E 7E 77 78 76 72 70 71 6B 6A 63
0x00009EE0 63 62 5F 60 5E 5E 61 62 5F 5F 63 61 62 5E 5D 5C
0x00009EF0 5C 59 57 57 4B 46 3A 32 32 32 36 3A 3A 3C 3E 3F
0x00009F00 45 49 48 47 43 3F 40 41 45 42 41 41 44 46 47 48
0x00009F10 49 44 43 3F 3C 38 36 36 35 39 39 39 39 36 36 36
0x00009F20 31 35 36 3C 41 47 50 57 57 57 59 57 55 56 57 52
0x00009F30 46 44 43 42 43 45 49 4D 4B 45 42 3F 3F 44 48 4B
0x00009F40 4E 4D 49 45 42 3E 3B 37 32 2F 2E 2E 2D 31 32 33
0x00009F50 32 35 33 33 2F 2C 2B 28 28 24 21 1F 1D 1F 20 22
0x00009F60 24 28 2A 2D 30 34 38 38 3C 3A 3D 3B 38 34 2F 2D
0x00009F70 2B 29 29 29 28 25 2A 2D 2A 2A 2E 2C 2E 31 2F 32
0x00009F80 34 36 37 3A 38 3D 3D 3B 42 43 44 44 4A 4A 4B 4C
0x00009F90 50 4E 53 53 53 56 57 57 58 5C 60 60 60 64 66 63
0x00009FA0 66 67 6A 69 68 6B 6A 6E 6E 6C 6D 6E 6E 6E 6E 70
0x00009FB0 74 73 7C 7E 86 8E 92 8A 86 7C 76 76 72 6E 65 5C
0x00009FC0 4C 3F 39 32 32 39 40 51 63 79 9F DC FF FF FF FF
0x00009FD0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009FE0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x00009FF0 FF FF FE F2 F2 EE EA EC E1 D6 D2 CA C7 C5 C3 C1
0x0000A000 C0 BA C0 B9 B5 B1 AF AA A4 A6 A2 A1 9F 9A 98 99
0x0000A010 91 8C 8B 8B 88 84 84 80 7E 7D 7A 76 75 74 72 70
0x0000A020 71 6B 69 68 67 61 63 62 61 62 5E 62 61 62 62 61
0x0000A030 5F 60 60 5C 5C 5B 59 56 4C 46 3B 33 31 32 36 3A
0x0000A040 3B 3D 45 46 4F 53 58 4E 44 3F 3D 42 46 43 44 42
0x0000A050 46 42 45 46 46 43 43 42 3F 39 33 33 35 38 3A 39
0x0000A060 3B 38 3A 36 36 38 3A 40 46 50 58 5E 62 62 60 62
0x0000A070 5D 5C 59 55 4D 4C 49 4A 4B 4E 54 57 59 54 49 45
0x0000A080 46 4E 52 58 5A 56 51 4E 48 44 3E 39 32 32 2F 2D
0x0000A090 30 34 39 3F 43 45 43 43 3C 38 32 2C 28 23 1F 1D
0x0000A0A0 1E 1E 1F 21 24 25 28 2C 30 33 36 3A 3A 3E 3E 3A
0x0000A0B0 3A 38 34 32 31 2D 30 2D 2C 2D 2E 31 2C 2C 2C 2F
0x0000A0C0 2D 2F 32 34 34 35 3A 3A 3C 3B 3C 40 42 41 44 46
0x0000A0D0 48 49 4E 4E 4F 53 51 51 53 53 53 57 5A 5F 5D 5E
0x0000A0E0 5F 61 65 63 63 66 62 66 67 66 68 6B 6B 6A 6E 6C
0x0000A0F0 6E 6D 6F 71 70 76 7D 7E 87 8B 8E 87 81 7A 77 74
0x0000A100 70 6D 67 5A 4A 3E 38 33 30 34 3B 48 5A 74 97 D6
0x0000A110 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A120 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A130 FF FF FF FC FD F6 F1 EA E7 EB DF E0 DC D2 C9 C4
0x0000A140 C4 C1 BE BE BB BC BA B2 AD AF AD A7 A4 A1 A1 9D
0x0000A150 99 9C 99 94 8F 8E 8F 87 84 83 82 81 7C 7D 7B 7A
0x0000A160 79 74 76 72 6D 6F 6A 6B 66 66 65 64 62 60 61 5F
0x0000A170 62 61 61 62 61 61 5D 5D 5A 5E 58 53 4F 43 3A 30
0x0000A180 2F 33 36 3C 3B 3F 47 54 5E 64 61 57 4C 41 3E 41
0x0000A190 45 45 43 40 3E 3F 43 42 43 44 43 3D 3C 33 32 34
0x0000A1A0 34 36 39 3B 3B 39 3C 38 3C 3A 3E 45 4C 54 5E 65
0x0000A1B0 62 67 66 65 61 61 5C 56 4E 48 4B 50 50 5A 5A 63
0x0000A1C0 64 5F 55 50 4F 53 59 5D 61 5A 56 50 4E 4A 45 3B
0x0000A1D0 36 32 2F 30 33 3C 43 4C 54 5A 5A 54 4C 41 36 2E
0x0000A1E0 28 23 1E 1D 1C 1C 1E 20 22 25 27 2A 2E 31 37 35
0x0000A1F0 3A 3A 3F 3D 3C 38 34 33 32 33 31 31 30 2D 2E 2E
0x0000A200 2A 2C 2A 2E 2F 31 34 34 34 34 38 37 38 3C 3C 3F
0x0000A210 42 43 45 45 48 48 4A 4A 4F 4E 4D 4E 51 51 53 59
0x0000A220 59 5C 5C 5C 60 60 60 60 64 65 63 64 66 68 68 6A
0x0000A230 6D 6A 6C 68 69 6E 6D 71 6C 73 7A 7D 86 8A 8B 89
0x0000A240 7D 77 75 71 73 70 65 59 4B 3F 33 34 2E 30 34 42
0x0000A250 53 6C 8E CA FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A260 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A270 FF FF FF FF FF FF FF FF F9 FA F6 F0 EC E8 E2 DE
0x0000A280 D9 D2 C3 C2 C0 C1 BF B9 BB B7 B8 B3 AE AC A9 A2
0x0000A290 A2 9D 96 95 98 93 94 91 90 8A 8A 89 89 82 80 81
0x0000A2A0 7C 7D 7B 7A 75 79 75 72 71 70 6A 69 6A 64 66 60
0x0000A2B0 62 62 60 60 5F 64 64 62 61 5F 5C 5D 5D 5A 57 53
0x0000A2C0 4B 41 39 31 2C 32 34 3A 3A 41 4F 5E 6B 6F 6A 60
0x0000A2D0 4C 42 3E 3F 43 46 43 40 40 3F 3F 3F 43 41 3E 3B
0x0000A2E0 36 31 30 2E 32 35 38 3C 39 3B 3D 3A 3C 40 42 48
0x0000A2F0 4E 57 5F 62 65 66 67 67 67 5F 5A 51 4D 49 4D 53
0x0000A300 57 5A 62 69 6A 62 5B 54 53 56 5B 5B 5F 5D 5A 56
0x0000A310 4F 4C 4A 42 3A 33 31 31 38 3E 4D 5A 65 67 69 5E
0x0000A320 56 47 3C 30 27 22 1C 1D 1D 1C 1D 1F 20 24 26 2A
0x0000A330 2E 31 36 35 39 39 3B 3B 3C 3A 33 32 32 2F 2C 2B
0x0000A340 27 27 27 23 2D 2D 2F 2E 30 32 32 32 33 35 38 38
0x0000A350 3A 3C 3E 3D 42 42 45 46 46 48 4A 4B 4F 4D 4F 52
0x0000A360 51 52 53 58 58 58 5C 5F 5E 5F 60 5F 5F 64 63 62
0x0000A370 67 66 66 68 67 69 6B 6B 6F 6C 6B 6B 6C 6F 76 81
0x0000A380 83 8B 8E 84 7D 75 71 72 74 6A 62 57 46 3D 36 31
0x0000A390 2E 2D 35 3F 4E 64 8B C6 FF FF FF FF FF FF FF FF
0x0000A3A0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A3B0 FF FF FF FF FF FF FF F3 FF FF FF F0 FA F4 F1 EC
0x0000A3C0 E6 E4 E2 DC D8 CF C4 C1 BE C0 BC BE C2 B9 B9 B1
0x0000A3D0 AC AE A6 A0 9D 9A 98 97 9A 98 94 92 8E 8E 8D 86
0x0000A3E0 86 84 82 82 7E 7E 7B 7C 7A 75 74 72 73 6E 6C 6A
0x0000A3F0 6A 65 62 63 62 61 5F 62 60 61 62 65 62 61 62 5E
0x0000A400 5D 59 57 52 4A 41 38 31 2E 30 37 39 3D 43 56 6A
0x0000A410 76 7D 74 67 56 45 40 43 44 45 43 3F 41 3D 41 3F
0x0000A420 3F 3D 39 3A 33 31 30 2D 30 35 38 39 3E 3D 3F 3B
0x0000A430 3D 41 45 49 50 56 5C 63 62 68 68 65 62 60 58 50
0x0000A440 4A 49 4A 51 5D 61 63 6A 6A 62 5A 53 53 56 58 5C
0x0000A450 5C 5C 59 56 51 4B 47 46 3B 33 30 31 35 45 53 62
0x0000A460 6A 6F 6E 66 57 49 3A 32 28 22 1C 1A 1A 1C 1C 1E
0x0000A470 21 25 27 2A 2D 2E 33 39 3A 38 3B 3B 39 36 32 2F
0x0000A480 2D 29 27 25 22 21 1F 1D 2A 2D 2F 2F 31 32 33 34
0x0000A490 34 38 38 3A 38 3D 3B 3E 3F 41 42 45 47 46 49 4B
0x0000A4A0 4B 4B 4F 52 4F 51 52 57 58 58 58 5E 5D 5E 61 5D
0x0000A4B0 5E 5F 63 64 63 62 64 66 67 66 6A 6A 6A 6B 6D 6E
0x0000A4C0 6F 70 74 7A 82 86 8A 84 7D 78 72 71 70 6C 64 55
0x0000A4D0 46 3B 34 2F 2E 2F 32 40 4D 62 8D C8 FF FF FF FF
0x0000A4E0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A4F0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A500 FF FE FD F2 EF EB E1 E1 E1 D2 CB C8 C5 C0 BF BB
0x0000A510 C1 B9 B8 B6 B2 AC A3 A3 A1 9A 9D 99 98 93 91 91
0x0000A520 8D 8C 8C 87 86 85 82 81 7E 7E 7D 78 7A 74 73 72
0x0000A530 71 6E 6E 69 68 68 64 63 61 62 60 5E 62 65 64 64
0x0000A540 61 62 61 5F 5C 57 57 4F 48 3E 35 30 2D 30 35 3A
0x0000A550 3C 47 5C 72 7D 87 80 6E 57 4A 40 40 41 41 3F 3D
0x0000A560 3B 3B 3B 3F 3E 3A 36 36 35 2F 30 2D 30 34 3A 3A
0x0000A570 3C 3B 3D 3D 41 43 43 47 4C 51 5B 5D 61 63 63 64
0x0000A580 60 5E 57 4E 4B 48 49 4C 53 5C 5D 5E 61 5B 58 51
0x0000A590 50 53 54 58 59 59 57 53 4F 4B 49 3E 3D 38 31 33
0x0000A5A0 38 44 4F 5F 68 6A 65 5E 51 45 39 2E 28 22 1C 1B
0x0000A5B0 1B 1B 1C 1E 21 23 25 29 2D 30 33 37 38 3A 38 3A
0x0000A5C0 39 35 2E 2C 28 25 23 22 1F 1C 1B 1B 2B 2D 2E 30
0x0000A5D0 2F 31 32 33 34 39 38 39 3B 39 3C 40 41 42 42 46
0x0000A5E0 47 46 48 4A 4D 4F 4C 4F 51 53 52 54 55 55 58 5B
0x0000A5F0 5D 5C 5B 5B 5D 5D 60 61 62 63 62 66 67 66 68 6A
0x0000A600 6B 67 69 6C 6C 72 73 7E 82 85 85 81 78 71 6F 6D
0x0000A610 6E 6A 65 53 46 3D 34 30 2D 2C 34 40 50 64 8A C8
0x0000A620 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A630 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF F9
0x0000A640 FF FF FF FF FD FC F7 F4 EC EC DF DF DB D8 D0 C9
0x0000A650 C9 C5 C4 C3 C1 B9 B3 B5 B1 AC A8 A4 A2 9C 9D 9A
0x0000A660 97 93 91 91 8D 8D 89 85 87 87 81 84 82 7D 7B 7A
0x0000A670 7A 70 76 71 71 6D 68 6A 65 66 66 65 62 5F 5F 60
0x0000A680 61 62 66 62 62 60 5F 5E 5B 59 52 51 49 40 34 2F
0x0000A690 2E 2F 33 36 3B 44 58 72 7F 86 7A 6B 55 46 3D 3B
0x0000A6A0 3A 3B 3A 36 38 37 39 36 38 36 33 33 30 30 2F 2F
0x0000A6B0 31 35 3A 38 3A 3B 3E 3D 3F 41 44 46 4B 4F 55 59
0x0000A6C0 5E 5E 61 5F 5C 58 54 4D 46 45 44 47 4C 52 56 55
0x0000A6D0 56 51 4D 49 49 4B 4F 51 54 52 51 52 4B 48 44 3E
0x0000A6E0 38 34 32 34 39 41 4D 56 5A 5E 5A 50 46 3A 31 2C
0x0000A6F0 24 21 1C 1C 1B 1C 1D 22 24 24 25 28 2B 2E 30 35
0x0000A700 36 36 36 39 34 31 2D 29 26 23 22 1F 20 20 1E 1F
0x0000A710 2C 2B 2F 2F 31 31 32 33 35 35 36 39 3A 3B 3C 3D
0x0000A720 40 3F 45 44 45 44 49 49 4A 4B 4B 4E 4D 51 50 53
0x0000A730 55 56 59 5C 5C 59 5C 5D 5C 5F 5D 62 61 5F 62 66
0x0000A740 66 63 66 68 6A 6A 6A 66 6B 6F 76 79 80 89 87 7D
0x0000A750 76 72 6F 6A 69 69 5F 50 45 3C 33 32 2D 2E 33 43
0x0000A760 52 66 93 D4 FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A770 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A780 FF FF FF FF FF FF FF FF FF FF FF FF F8 F1 EA E4
0x0000A790 E1 D4 CE CF CB C4 C6 C0 BE BE B6 B6 B5 B1 AB A9
0x0000A7A0 A4 9E 9F 9E 99 95 94 92 8E 8B 8B 89 85 86 87 84
0x0000A7B0 7E 7A 7E 76 77 74 6E 6F 6C 6B 6A 69 67 66 67 67
0x0000A7C0 63 61 5E 62 62 64 62 67 65 66 61 5E 5B 59 53 51
0x0000A7D0 47 41 35 30 2C 2E 32 36 3C 41 56 6B 74 7C 74 62
0x0000A7E0 4F 43 3A 35 35 34 34 32 32 32 32 32 33 32 33 32
0x0000A7F0 2E 2F 2E 2F 32 36 3B 3B 3E 3B 3E 3E 3D 3F 41 44
0x0000A800 47 4A 4E 50 55 5B 5A 58 55 51 4E 4A 47 41 42 42
0x0000A810 42 46 48 4A 47 47 42 43 42 42 47 48 4C 49 4A 47
0x0000A820 44 41 3C 3A 35 33 31 32 36 3E 44 4B 4C 4D 48 41
0x0000A830 3A 34 2E 28 24 22 21 1F 1E 1F 21 22 24 26 27 2A
0x0000A840 2E 2F 32 34 36 36 34 35 33 2E 2A 2B 27 28 28 26
0x0000A850 28 26 26 28 2C 2F 2C 2E 31 32 34 34 36 36 36 38
0x0000A860 39 3D 3C 3E 3F 3F 41 42 43 47 47 4A 4A 4A 4D 4D
0x0000A870 4E 4F 50 53 54 57 57 5A 5A 59 5D 5D 5A 5F 5C 5F
0x0000A880 5F 63 61 64 64 68 63 67 68 6A 68 68 6A 6F 75 7B
0x0000A890 81 87 81 7D 75 72 6C 6C 6F 6A 5E 51 44 3C 33 30
0x0000A8A0 2F 30 36 47 53 6A 95 DB FF FF FF FF FF FF FF FF
0x0000A8B0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000A8C0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FB
0x0000A8D0 EE F1 E9 E6 E1 DA D8 D0 CD CA C6 C3 BF BB B6 B5
0x0000A8E0 B2 B0 AC AC A7 A4 A5 9A 9A 95 97 92 8F 91 8F 8A
0x0000A8F0 83 83 85 80 80 80 79 79 73 74 71 6D 6B 6B 6A 66
0x0000A900 68 67 67 63 60 63 61 5D 61 5F 64 64 65 63 5F 62
0x0000A910 5C 58 57 4F 46 3E 35 2E 2B 2E 32 33 3A 40 4E 63
0x0000A920 69 6D 64 5B 4A 3E 35 31 31 2D 2B 2B 2C 2B 2D 2E
0x0000A930 2F 30 31 33 32 33 33 33 32 39 3B 3C 3D 3D 3B 3A
0x0000A940 3E 3E 3E 41 43 46 46 4B 4D 50 53 52 50 4D 4D 47
0x0000A950 45 3D 3E 3D 3D 3C 3E 3C 3D 3C 39 38 3A 3C 3E 41
0x0000A960 45 42 44 45 3F 3D 39 35 33 34 32 33 38 38 3E 3F
0x0000A970 40 3E 3B 37 32 2D 2B 2A 28 26 28 27 25 22 25 24
0x0000A980 26 28 2A 2C 31 32 36 35 36 38 34 34 32 2E 2C 2B
0x0000A990 2A 2B 2E 2D 2D 32 2F 30 2C 2D 2E 30 30 32 33 34
0x0000A9A0 36 33 37 39 3B 3C 3E 3F 41 41 42 43 46 44 44 47
0x0000A9B0 49 49 4B 4C 51 50 4E 4E 54 56 56 57 56 58 55 5A
0x0000A9C0 59 5A 59 5D 5D 5E 5F 5F 66 60 63 64 66 65 66 67
0x0000A9D0 69 6C 74 78 7E 81 7D 7F 76 70 6B 6C 6B 6A 5A 53
0x0000A9E0 44 3A 34 2F 2F 2F 38 45 57 70 9B DF FF FF FF FF
0x0000A9F0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AA00 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AA10 FF FF FF FF FD F4 EE E6 DD DC D2 D0 CB CD C5 C0
0x0000AA20 C0 BC BE B7 B3 B8 AF AD AB AB A1 A1 9B 94 95 93
0x0000AA30 92 8E 8A 89 86 83 82 83 7C 7C 7B 76 75 6E 6F 6A
0x0000AA40 68 6A 66 67 67 66 68 62 62 61 5E 5B 5F 60 64 64
0x0000AA50 65 64 62 5E 5A 58 56 52 45 3E 36 2D 2C 2B 2F 32
0x0000AA60 38 3B 48 56 5A 5E 56 49 41 38 32 2F 2C 2B 28 28
0x0000AA70 28 2A 2A 2D 2F 33 34 39 3A 3B 38 37 3A 3D 3E 43
0x0000AA80 3F 3F 3D 3C 3D 3D 3E 3E 3E 42 3F 44 47 4A 4D 4E
0x0000AA90 4C 4B 4A 45 42 3D 3B 39 36 35 34 33 35 33 32 32
0x0000AAA0 35 39 39 3F 3E 40 45 41 3F 3C 37 34 33 32 32 33
0x0000AAB0 35 39 39 39 38 34 31 31 2F 2C 2D 2A 2B 2B 2B 29
0x0000AAC0 27 27 25 28 28 29 2C 2E 32 36 3A 3A 38 38 35 34
0x0000AAD0 2E 2B 2B 2C 2E 30 32 33 34 33 32 31 2E 2E 2E 2F
0x0000AAE0 30 31 33 36 36 35 38 39 3A 39 39 3E 3E 40 3F 43
0x0000AAF0 46 43 44 46 48 4C 4A 4E 4D 49 4F 4F 53 55 55 57
0x0000AB00 56 57 56 58 57 58 5C 5C 5A 5C 5D 5E 5F 5F 62 62
0x0000AB10 66 64 62 67 64 6C 72 73 7E 81 7E 79 71 70 6D 6C
0x0000AB20 6C 68 61 52 44 3A 33 2F 2E 2E 36 49 59 70 9E DF
0x0000AB30 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AB40 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AB50 FF FC FF FE FD FC FA F9 F5 EC E9 E2 E1 D8 D5 D0
0x0000AB60 CB CA C8 C4 C1 BC B8 B4 B2 B2 B1 B0 B2 AA A4 A2
0x0000AB70 99 99 93 91 92 8D 8E 89 87 85 83 81 83 82 7D 7B
0x0000AB80 72 6F 6C 68 68 69 69 64 65 65 65 61 60 63 5C 5E
0x0000AB90 60 5F 66 67 68 67 66 61 5B 58 54 4F 47 3E 35 2D
0x0000ABA0 2A 2B 30 33 33 38 41 4A 4F 4E 4C 44 3B 33 31 2E
0x0000ABB0 28 28 27 26 28 29 2A 2F 35 39 3C 3F 3E 41 42 3D
0x0000ABC0 41 43 46 46 44 43 43 41 40 40 40 40 3E 3F 41 41
0x0000ABD0 45 48 4E 50 4F 4D 4B 47 43 3D 3A 39 34 31 2F 30
0x0000ABE0 31 30 2F 2F 32 35 3B 41 42 46 47 45 42 41 3D 3B
0x0000ABF0 39 36 34 31 33 36 36 38 32 30 2D 2D 2B 2C 2B 2C
0x0000AC00 2B 2B 2A 29 28 27 25 26 27 2A 2C 32 34 37 39 38
0x0000AC10 37 35 34 30 2E 2E 2F 2F 2F 32 34 33 30 30 2D 2C
0x0000AC20 2C 2D 2D 32 2F 30 33 34 34 36 39 37 39 3C 3D 3E
0x0000AC30 3F 41 41 41 43 43 44 48 4A 4A 4C 4B 4B 4A 4E 50
0x0000AC40 52 53 53 53 57 54 56 56 57 58 5C 5D 5A 5C 5E 5C
0x0000AC50 5E 5F 62 63 62 66 64 65 66 69 73 76 7B 7E 80 7A
0x0000AC60 73 6D 6B 6A 6B 6A 5B 51 43 39 32 2D 2C 30 38 48
0x0000AC70 57 6F A0 E2 FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AC80 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AC90 FF FF FF FF FF FF FF FC FD FF FF F8 F8 EF E8 E6
0x0000ACA0 DF D9 D5 CF D6 D3 CD CC C7 BF B9 B8 B6 B2 B3 B2
0x0000ACB0 AE AD A3 A4 9D 98 91 8F 91 90 8E 8A 86 84 80 83
0x0000ACC0 82 7B 7B 77 73 70 6D 6C 69 66 66 66 66 64 67 62
0x0000ACD0 65 61 5E 5E 5F 65 63 64 66 66 61 5F 59 58 55 4E
0x0000ACE0 48 3F 35 2C 2B 2B 2F 30 32 34 3A 3D 40 43 41 3D
0x0000ACF0 38 35 30 2F 2B 2A 27 26 27 2A 2F 37 3C 43 46 4A
0x0000AD00 48 47 49 47 4A 4C 4F 4F 51 4B 4A 46 47 47 46 44
0x0000AD10 46 41 42 44 49 4C 53 56 55 56 4F 4C 45 41 3C 3A
0x0000AD20 35 31 35 35 34 34 37 36 3B 3D 42 48 4B 51 50 4D
0x0000AD30 4C 4A 45 41 39 38 33 31 33 34 38 34 33 31 2F 2F
0x0000AD40 2D 2D 2B 2C 2A 2B 2B 27 25 24 24 25 27 28 2C 2E
0x0000AD50 32 35 3B 3A 34 34 32 2F 30 31 32 31 32 32 30 30
0x0000AD60 2D 2B 29 25 2D 2F 2E 2F 30 30 32 34 34 36 37 36
0x0000AD70 3C 3B 3A 3B 3F 3E 41 3F 40 45 45 47 48 48 4C 48
0x0000AD80 48 4B 4D 4C 51 53 52 52 54 54 53 56 57 57 58 58
0x0000AD90 59 5B 5B 5C 5E 5F 5F 63 61 64 62 64 66 6A 6E 74
0x0000ADA0 7B 81 7D 78 71 6C 6B 6A 6A 66 5B 50 42 3A 33 2E
0x0000ADB0 2E 30 38 46 57 70 9D DC FF FF FF FF FF FF FF FF
0x0000ADC0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000ADD0 FF FF FF FF FF FF FF FF EE F9 FC FE FD F5 F8 F5
0x0000ADE0 F1 EB E7 E4 E0 DB D3 D9 D9 D7 D3 D0 C9 BF BE BB
0x0000ADF0 B9 B6 B3 B0 AC AE AA A2 9D 9B 98 93 91 8F 8F 8D
0x0000AE00 86 82 81 81 81 7E 7C 79 72 6C 6D 66 66 68 68 66
0x0000AE10 63 64 66 64 62 60 5D 5E 5E 62 66 64 65 65 62 61
0x0000AE20 5A 55 54 4D 48 42 34 31 2B 29 2E 32 33 34 34 36
0x0000AE30 38 3A 3A 3A 3A 36 34 32 2E 2A 27 29 2B 2D 36 3D
0x0000AE40 45 4A 50 53 51 52 53 51 53 55 56 5A 57 54 52 52
0x0000AE50 52 4F 4E 4A 48 47 48 4C 51 54 5A 5A 5E 59 58 52
0x0000AE60 4D 44 3F 39 3A 3B 3D 40 49 4C 4C 4E 4D 50 50 53
0x0000AE70 58 5B 5C 5A 5A 55 4F 48 42 3C 36 32 31 34 37 39
0x0000AE80 3B 39 39 36 34 34 32 2D 2A 2A 26 24 22 20 21 22
0x0000AE90 23 25 2A 2B 30 31 36 35 34 33 32 31 32 31 34 35
0x0000AEA0 35 35 32 2F 2E 29 27 24 2E 2E 2F 31 31 30 31 34
0x0000AEB0 32 38 35 38 39 3A 3A 3C 3E 3C 3F 3F 42 42 44 46
0x0000AEC0 46 4A 48 46 48 4B 4D 4C 50 4E 52 52 53 53 51 56
0x0000AED0 56 58 56 56 5B 5A 5A 5C 5B 5F 5D 5E 61 60 63 66
0x0000AEE0 65 68 6E 73 7A 7C 7C 77 72 6C 6A 6D 68 63 58 4E
0x0000AEF0 43 35 30 30 2B 2F 3A 48 59 72 9B DD FF FF FF FF
0x0000AF00 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AF10 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000AF20 FF FF FF FB F7 F5 EB E9 E2 E2 DE DC DA D8 D9 D5
0x0000AF30 CF CB C0 BB BB B6 B6 B4 AF B0 A9 A2 A1 9A 94 94
0x0000AF40 97 91 91 8E 8C 86 83 83 83 81 7D 75 73 6B 6C 66
0x0000AF50 64 65 63 64 63 62 63 62 63 60 61 5E 5D 5D 61 62
0x0000AF60 63 62 5F 5D 59 58 55 4D 47 41 37 31 2C 2C 2F 2E
0x0000AF70 30 32 34 35 34 39 3D 3F 3F 3B 3A 3A 32 30 2E 2C
0x0000AF80 30 35 3B 42 4C 56 56 59 5A 59 58 58 58 5F 61 60
0x0000AF90 5E 58 57 58 57 56 54 4F 4E 4F 4E 51 56 57 5C 5C
0x0000AFA0 5E 60 5E 5A 52 49 41 40 40 45 4C 58 68 71 78 70
0x0000AFB0 6F 66 61 5D 62 66 64 67 5F 5A 54 4B 48 40 3A 33
0x0000AFC0 32 33 38 3E 43 45 44 46 41 3C 35 2F 2C 27 24 1F
0x0000AFD0 1E 1F 1D 1F 22 22 27 2A 2C 31 32 34 33 32 33 34
0x0000AFE0 34 34 35 35 33 33 33 31 2E 2B 2B 26 2B 30 2E 30
0x0000AFF0 31 31 31 33 33 34 35 3A 38 3E 3C 39 3B 3E 40 40
0x0000B000 41 42 46 47 46 46 47 48 46 49 4C 4F 4E 4F 50 50
0x0000B010 52 53 54 54 56 53 55 58 59 5C 58 5B 5B 5D 5C 5E
0x0000B020 62 5F 5F 62 62 6A 6B 72 7A 7B 7C 75 6D 6D 69 67
0x0000B030 68 62 58 4C 41 36 33 2D 2D 31 39 49 55 73 9B D5
0x0000B040 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B050 FF FF FF FF FF FF FF FF FF FF FF FE FF FF FF FF
0x0000B060 FF FF FF FF FF FB FD F4 F3 EC EC F2 E5 DB DC DE
0x0000B070 D8 DB D7 D8 D2 CE C8 C2 C1 BF BA B6 B3 B1 AA A2
0x0000B080 9D 9C 99 97 93 99 90 8D 89 86 84 84 7E 7E 7C 73
0x0000B090 70 6B 69 67 66 64 63 63 61 62 62 65 62 5F 5E 5E
0x0000B0A0 5F 60 5E 5F 61 5E 5C 59 5A 5A 53 4E 49 40 39 31
0x0000B0B0 2B 2B 2C 2E 2E 2E 34 34 3A 41 45 4D 4A 4B 47 42
0x0000B0C0 3D 3A 36 32 33 38 3E 45 4E 56 5C 5D 60 63 62 63
0x0000B0D0 61 64 67 66 61 5B 5A 5C 5F 5D 59 58 55 56 58 57
0x0000B0E0 5A 59 5B 5E 62 60 5C 5D 59 51 49 47 48 54 62 78
0x0000B0F0 8A 99 9C 99 8E 80 73 69 6A 6B 6E 6A 64 5E 56 50
0x0000B100 48 40 3A 33 34 39 40 44 4D 51 53 56 4D 45 3B 33
0x0000B110 2D 25 21 1C 1D 1D 1E 1E 21 22 24 28 2B 2F 2F 32
0x0000B120 32 31 33 34 36 36 38 38 36 38 35 34 31 32 2C 29
0x0000B130 2E 2D 2F 31 31 32 33 31 34 36 36 38 3A 39 3C 3A
0x0000B140 3C 3E 3E 3F 43 44 44 43 45 45 45 44 47 4A 4B 4E
0x0000B150 4D 4D 4E 51 4F 51 52 53 54 53 54 57 53 5A 54 57
0x0000B160 5A 5A 5C 5C 5A 5D 61 61 61 66 69 6E 74 7B 7A 74
0x0000B170 6F 6C 67 69 66 5E 55 4C 3E 39 2F 2F 2D 2F 39 47
0x0000B180 58 6B 98 D8 FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B190 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B1A0 FF FF FF FF FF FF FF FF FF FF FF FC F9 F9 F4 EF
0x0000B1B0 EA E3 DA DA DD DE D8 D9 D8 D0 CB C5 C3 BF BC B5
0x0000B1C0 B6 B2 A9 A6 9F 95 9A 94 94 91 8D 8E 86 83 83 82
0x0000B1D0 7F 7E 79 75 70 6B 69 67 67 67 63 63 64 65 60 61
0x0000B1E0 62 62 5F 61 5F 5F 61 5F 62 5D 60 5C 5A 55 54 50
0x0000B1F0 48 41 3B 32 2B 2B 2A 2B 2E 30 31 3B 43 4A 57 5D
0x0000B200 5D 58 53 4F 48 43 3D 3A 38 3C 43 48 53 59 60 62
0x0000B210 66 67 67 65 67 6B 6A 68 67 60 5C 5D 65 62 60 5E
0x0000B220 5D 5B 58 5D 59 59 57 5A 5F 60 60 61 5D 57 4E 4C
0x0000B230 53 5F 72 8D A5 B1 B5 AD 9F 8C 79 6D 6C 6A 69 66
0x0000B240 63 61 55 4F 48 43 3D 38 39 3C 45 4D 56 5D 60 5D
0x0000B250 53 4F 40 32 2B 25 20 1D 1B 1E 1F 20 20 22 24 27
0x0000B260 27 2D 2E 31 32 33 34 35 36 35 39 36 33 34 33 31
0x0000B270 2F 2E 2C 28 2D 2E 2E 30 2F 32 2F 32 34 36 37 38
0x0000B280 3A 3A 3B 39 3E 3E 3F 3F 41 43 42 43 43 45 42 42
0x0000B290 47 49 48 4B 4C 4D 4F 4C 50 50 50 53 52 52 52 55
0x0000B2A0 57 56 56 57 5B 5A 5A 5B 5D 5C 5B 5E 61 64 64 69
0x0000B2B0 72 7A 76 73 6B 69 67 66 65 5C 55 49 40 35 2F 2F
0x0000B2C0 2E 2F 3A 48 56 6C 99 D4 FF FF FF FF FF FF FF FF
0x0000B2D0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B2E0 FF FF FF FF FF FF FF FF FF FF FF FF F6 FD FD F3
0x0000B2F0 F6 F3 F4 EB E9 E1 DC D5 D6 D4 D6 D4 CF CE C7 C3
0x0000B300 BE C0 B9 B9 B1 B0 AA A3 A0 9A 9B 92 91 91 8B 88
0x0000B310 88 87 86 7F 81 7E 78 74 6F 70 69 67 67 63 67 63
0x0000B320 61 64 63 61 62 61 5F 60 61 63 63 5F 5E 61 5D 5E
0x0000B330 5B 58 55 51 4C 43 39 2F 2C 2A 2A 2A 2B 2D 32 3F
0x0000B340 4C 5B 66 6D 6B 68 62 5D 55 4A 47 42 3F 3F 43 49
0x0000B350 51 5B 62 64 68 67 68 6E 72 6C 6E 6C 66 61 61 60
0x0000B360 63 64 60 5F 5A 5E 5B 5A 56 57 57 58 5C 61 64 64
0x0000B370 64 5D 54 53 5C 69 80 98 AB B5 B1 AC 9E 8E 79 6C
0x0000B380 69 67 65 64 60 5C 52 4D 47 40 3D 39 39 3D 48 52
0x0000B390 5B 63 5F 5E 59 50 41 34 2B 26 20 1B 1B 1C 1F 1D
0x0000B3A0 20 21 22 25 27 2C 2E 31 33 33 34 34 36 34 36 34
0x0000B3B0 34 2E 2F 2E 2E 29 2B 27 2E 2F 30 2E 31 33 31 33
0x0000B3C0 36 34 35 37 36 3A 3C 3D 3F 3E 3D 41 40 41 41 42
0x0000B3D0 44 44 41 44 44 47 4A 4A 4B 4B 4F 4E 4C 4D 4E 4F
0x0000B3E0 50 50 53 4F 53 56 56 56 5B 59 57 59 59 5A 5A 5A
0x0000B3F0 5C 60 66 6E 6E 72 77 71 6B 68 63 63 63 60 51 47
0x0000B400 3D 36 31 2C 2C 30 38 46 57 6B 95 D8 FF FF FF FF
0x0000B410 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B420 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B430 FF FF FF FA F5 F7 F2 E9 EA E8 E1 D6 D9 D4 D2 D2
0x0000B440 CC C3 C3 BC C3 C0 B4 B4 AE AA A6 A1 9C 95 9A 93
0x0000B450 93 90 8E 88 88 84 83 80 84 7E 7C 77 72 6C 6A 68
0x0000B460 68 65 67 65 66 61 65 65 64 62 61 61 5F 60 60 64
0x0000B470 66 60 61 61 5C 57 53 51 4B 42 39 30 2B 2C 2A 2B
0x0000B480 2C 2C 38 46 55 67 73 82 7F 7B 6F 68 61 5A 51 48
0x0000B490 43 43 44 4A 50 5B 63 66 69 6A 6D 6D 6E 70 6C 6C
0x0000B4A0 68 62 5D 60 61 61 5F 5D 5B 5B 58 56 55 57 5B 5A
0x0000B4B0 5E 63 66 67 63 5D 58 55 5A 66 73 88 9C AA A5 98
0x0000B4C0 8E 7E 6D 62 5F 5D 5B 57 58 52 4D 4B 48 41 3C 38
0x0000B4D0 3A 3F 48 4E 56 5D 5E 5B 52 4A 3B 31 29 25 21 1C
0x0000B4E0 1C 1B 1C 1E 20 21 23 24 29 2B 2F 31 33 35 33 33
0x0000B4F0 34 35 34 33 30 2F 2E 2D 2D 2B 2B 28 2E 30 30 33
0x0000B500 32 32 33 33 33 36 38 36 39 39 3C 3B 3D 3E 3D 3F
0x0000B510 3E 3F 42 42 44 42 44 48 46 48 4D 4C 4B 4B 4D 4D
0x0000B520 4B 4D 4C 4E 4E 4F 52 53 52 53 53 56 54 57 59 59
0x0000B530 58 56 59 5A 59 61 6A 6C 74 74 75 71 6B 68 62 62
0x0000B540 60 5A 53 45 3F 36 2E 2B 2C 31 3A 48 58 6E 94 D4
0x0000B550 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B560 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B570 FD EF FF FF FF FB F5 EF EC F0 EE EA E1 DF D8 D8
0x0000B580 D6 D4 CF C9 C5 C3 C1 BA BE B4 B5 B0 AA A9 A3 A3
0x0000B590 A3 9D 9D 91 98 97 8B 87 83 83 7F 81 82 7E 7C 78
0x0000B5A0 71 6C 6D 68 67 65 64 65 68 65 66 66 66 63 63 5E
0x0000B5B0 63 5E 61 62 67 63 63 62 5E 56 56 50 4B 46 37 33
0x0000B5C0 2C 29 2B 29 2A 2D 36 4C 5F 73 87 8D 8D 85 7D 70
0x0000B5D0 6A 62 57 4C 45 43 45 47 51 5A 62 68 68 69 6B 6E
0x0000B5E0 6D 6E 6C 6B 67 61 60 5C 5D 5B 5C 57 55 55 52 55
0x0000B5F0 55 55 58 5D 66 69 6A 6A 69 62 59 5A 58 5C 68 73
0x0000B600 7D 83 81 7A 6F 64 5B 58 52 4F 50 4E 4C 4A 47 43
0x0000B610 40 3B 38 36 39 3C 46 4B 4E 55 57 50 49 3C 36 2C
0x0000B620 29 24 20 1D 1B 1C 1C 1D 20 23 23 27 29 2D 30 33
0x0000B630 36 34 34 35 36 33 35 34 33 34 33 32 30 32 30 2F
0x0000B640 2E 2F 2F 30 32 32 32 35 35 34 36 37 38 39 3B 3C
0x0000B650 3B 3D 3D 3C 3F 40 41 44 41 43 44 46 47 46 48 48
0x0000B660 48 48 4A 4A 4A 4B 4C 4B 4B 4E 50 4E 51 53 54 53
0x0000B670 54 55 55 56 58 59 59 5A 5A 61 67 6B 73 76 71 6D
0x0000B680 68 64 62 5E 5E 58 51 46 3D 34 2F 2D 2C 30 39 49
0x0000B690 58 6E 95 D3 FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B6A0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B6B0 FF FF FF FF FF FF FF FF FF FD F6 EF EE EA EE E6
0x0000B6C0 E2 DF DC D4 D2 CF CB C8 C5 C0 C1 B7 B9 B3 B1 AC
0x0000B6D0 A7 A7 A5 A4 A1 9F 9B 98 8F 8F 8B 88 81 7E 84 7C
0x0000B6E0 7C 7D 7A 75 72 6E 6C 69 67 65 66 62 64 63 66 65
0x0000B6F0 64 63 62 62 5F 5F 5F 65 66 63 64 61 59 59 54 55
0x0000B700 4E 46 39 33 2B 28 28 27 29 2C 39 4F 66 7B 8C 91
0x0000B710 8F 88 78 74 6D 5F 59 51 49 48 44 4C 53 5A 63 66
0x0000B720 68 6E 6A 6C 67 6B 68 67 63 5C 57 57 56 54 52 50
0x0000B730 4F 4A 4F 4E 51 52 55 5D 66 69 6A 69 66 5E 5B 55
0x0000B740 55 54 56 59 5B 62 5D 5A 54 51 4C 4B 48 46 47 44
0x0000B750 44 41 3F 3C 39 33 34 33 35 3B 40 47 49 4B 46 44
0x0000B760 3D 35 31 2A 26 26 23 21 20 1D 1E 20 22 24 26 29
0x0000B770 2A 32 33 35 38 38 35 38 36 35 35 36 37 38 39 39
0x0000B780 36 35 38 33 2E 2E 2E 30 33 32 31 33 36 36 39 38
0x0000B790 38 38 39 3C 39 3D 3A 3B 40 41 43 44 42 45 44 45
0x0000B7A0 45 46 49 47 49 47 48 48 49 49 4A 4A 4D 4F 52 53
0x0000B7B0 51 53 52 55 56 54 54 58 57 55 56 59 59 60 64 6B
0x0000B7C0 72 75 71 6E 67 62 61 5E 5A 55 4F 46 3B 34 2F 2C
0x0000B7D0 2B 30 3A 48 57 6D 99 D1 FF FF FF FF FF FF FF FF
0x0000B7E0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B7F0 FF FF FF FF FF FF FF FF FF FF FF FF F9 F2 F0 EC
0x0000B800 EB EB E9 E2 DB DB D5 D0 D1 C9 C7 CB C8 C3 BA BD
0x0000B810 B4 B4 B0 AE A7 A4 A5 A2 9D A0 95 99 98 94 8C 87
0x0000B820 84 7E 7E 7F 7A 7A 77 78 73 6D 69 6A 67 65 65 65
0x0000B830 64 61 62 64 64 61 60 5F 5D 5E 61 61 64 65 63 63
0x0000B840 5D 59 54 51 4B 46 3C 31 2D 28 29 27 29 2A 39 4E
0x0000B850 66 79 89 92 94 81 79 71 6C 63 59 51 48 45 46 4A
0x0000B860 4F 5D 60 68 69 6E 69 68 67 63 60 62 59 55 53 4D
0x0000B870 4E 4B 48 47 47 47 46 48 4B 4E 52 5B 5F 62 67 67
0x0000B880 63 63 5A 55 52 4F 4D 4A 4A 47 46 45 42 40 42 3F
0x0000B890 41 41 43 40 3E 3B 38 39 34 31 31 34 36 38 3D 3E
0x0000B8A0 3E 3F 3A 39 34 2F 2C 2A 29 27 25 26 25 23 23 22
0x0000B8B0 25 25 28 2B 2B 31 32 38 39 38 38 36 39 39 3A 3A
0x0000B8C0 38 3B 39 3B 3C 3C 36 34 2F 2F 2F 32 32 34 32 33
0x0000B8D0 34 33 37 38 36 39 38 39 3C 3D 3F 40 3F 3E 42 43
0x0000B8E0 43 45 41 45 46 46 46 48 48 47 45 47 4A 49 48 4B
0x0000B8F0 4E 4E 4F 51 50 52 54 51 54 55 56 55 58 57 57 59
0x0000B900 58 60 63 6A 73 72 72 6B 67 64 5C 5A 57 54 4A 43
0x0000B910 3A 33 2F 2A 2B 2E 38 49 53 6E 98 D7 FF FF FF FF
0x0000B920 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B930 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000B940 FB F9 F6 EA E9 EA EA E2 DF DA D8 D6 CC CF CB C8
0x0000B950 C5 C5 C2 BD BB B2 B2 AD A7 A5 A4 A0 9D 98 9C 98
0x0000B960 98 91 8E 8B 84 81 7B 7C 7B 77 7A 75 74 71 6B 66
0x0000B970 66 66 64 65 63 62 68 62 63 63 62 5E 5D 5E 62 61
0x0000B980 64 67 63 5F 5D 58 56 53 4B 45 3A 32 2D 29 29 26
0x0000B990 28 2A 36 4D 63 79 86 8D 86 7C 73 6E 68 63 5A 51
0x0000B9A0 4B 45 45 4D 53 5A 69 6F 6A 69 67 61 5F 5D 58 54
0x0000B9B0 52 4B 48 46 46 45 46 41 41 43 41 44 45 48 4D 53
0x0000B9C0 59 5D 61 5F 62 63 5E 5A 55 4C 46 42 3C 39 38 35
0x0000B9D0 34 37 3A 39 39 3E 3E 3E 3A 38 35 32 31 31 31 32
0x0000B9E0 35 38 3A 39 3B 39 33 32 2F 2F 2C 2B 2B 2A 29 2A
0x0000B9F0 2A 27 26 27 25 2A 2A 30 2F 31 32 38 35 38 39 39
0x0000BA00 3D 3B 3B 39 39 3A 3A 39 38 33 32 2C 2D 2D 2F 32
0x0000BA10 33 33 32 35 34 35 36 37 37 3A 39 3A 3B 3D 3C 3D
0x0000BA20 42 41 40 42 3F 43 43 44 44 45 46 46 48 47 48 48
0x0000BA30 46 47 49 4B 49 4B 4D 4F 4D 51 51 52 52 56 54 54
0x0000BA40 55 54 56 58 5B 5F 64 69 6F 70 6F 6A 64 5F 5E 59
0x0000BA50 55 53 48 44 3A 35 2E 2C 2C 2F 3B 49 57 6F 9A D0
0x0000BA60 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BA70 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BA80 FF F8 FE FC F1 F6 EE ED E8 E9 E7 E2 E0 DC D7 D6
0x0000BA90 D2 CF D2 C8 C5 C9 C3 BE C2 B4 B5 AE A8 A8 A5 A0
0x0000BAA0 9E 99 9B 97 92 92 8B 8A 84 7E 7B 7A 79 7A 74 74
0x0000BAB0 72 6D 6C 64 64 65 61 64 63 65 60 64 63 5F 63 60
0x0000BAC0 62 5E 62 60 5E 61 62 5E 5A 58 57 53 4E 47 3C 32
0x0000BAD0 2B 28 26 25 28 2A 34 4A 5F 72 83 87 86 7A 6C 67
0x0000BAE0 67 5D 58 53 48 48 49 4D 56 5C 66 69 6A 68 60 5E
0x0000BAF0 5B 57 53 4F 4D 48 46 42 43 44 43 3F 43 42 42 42
0x0000BB00 47 44 4C 51 58 5B 5C 62 61 61 5F 59 55 4D 44 3E
0x0000BB10 39 35 31 30 2E 32 36 39 3A 3E 3D 3F 3C 39 33 33
0x0000BB20 32 31 33 33 33 32 34 38 35 33 30 2E 2C 2C 2D 2C
0x0000BB30 2C 2D 2C 2C 29 28 26 26 27 27 27 2C 2E 31 34 37
0x0000BB40 36 38 37 37 35 3C 3A 38 36 38 34 33 33 2F 2B 27
0x0000BB50 2D 32 30 32 33 32 32 31 34 35 38 36 38 38 3A 39
0x0000BB60 3C 3D 3E 3F 3F 40 41 42 43 42 44 44 46 45 46 46
0x0000BB70 47 47 47 46 47 48 4A 4B 4A 4B 4E 4C 4E 4D 51 50
0x0000BB80 51 54 53 53 55 52 53 56 5B 5F 63 68 6C 6E 6D 67
0x0000BB90 63 62 5A 5A 52 52 4A 44 3C 33 2E 2A 2B 32 38 47
0x0000BBA0 58 6F 95 D2 FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BBB0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BBC0 FF FF FF FF FF FF FF FC F8 F2 F0 F1 F0 ED EB E5
0x0000BBD0 E0 DF DF D7 D6 D3 D4 CE CC CF C4 C1 C2 BD B8 B2
0x0000BBE0 AB A8 A5 9F 9A 99 94 93 91 8E 8A 87 82 7A 7D 7A
0x0000BBF0 79 7B 79 76 72 6C 68 66 63 62 61 61 62 62 5F 63
0x0000BC00 62 62 62 62 5F 5E 5F 60 5E 5D 61 5C 5B 59 55 51
0x0000BC10 4F 47 3C 32 2C 29 26 28 28 2B 32 44 5C 6D 7C 82
0x0000BC20 7F 74 6E 66 63 62 58 50 4E 4B 4C 4E 56 5D 64 65
0x0000BC30 69 64 5F 5A 5A 53 54 53 4E 4D 49 45 46 44 45 41
0x0000BC40 44 42 42 41 44 47 4B 54 58 5C 61 66 66 64 60 5D
0x0000BC50 54 4F 46 3E 39 35 34 32 32 33 3A 3A 3E 3F 43 45
0x0000BC60 43 41 3C 3C 37 35 36 33 33 33 32 35 33 31 31 2D
0x0000BC70 2B 2C 2A 2C 2C 2B 2B 2A 29 26 27 24 24 26 28 2A
0x0000BC80 2C 30 34 32 34 38 33 38 36 36 38 34 35 35 35 35
0x0000BC90 2F 2E 2B 26 32 30 33 32 34 34 34 34 34 35 36 38
0x0000BCA0 36 36 3A 39 3B 3C 3E 3E 3F 3F 40 41 42 43 42 44
0x0000BCB0 43 45 44 47 43 46 48 47 49 47 48 49 4D 4C 49 4C
0x0000BCC0 4C 4F 50 51 50 52 50 52 53 53 54 53 58 5F 5F 67
0x0000BCD0 6B 6E 69 67 61 5B 57 56 54 53 4B 43 3A 32 2D 2B
0x0000BCE0 2C 2E 3B 47 55 70 9B D3 FF FF FF FF FF FF FF FF
0x0000BCF0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BD00 FF FF FF FF FF FF FF FF F3 FE FC F8 F3 F2 F0 E6
0x0000BD10 EF ED EC E6 DC DA E0 DC DA D2 D0 CF CC C8 C9 C3
0x0000BD20 BE BB B5 B2 AF A8 A4 9E A1 96 93 91 8B 8F 8A 87
0x0000BD30 83 7D 7B 78 79 74 79 74 75 6D 69 68 61 62 61 61
0x0000BD40 62 62 66 63 64 64 64 66 5F 5F 5F 60 5E 5D 5D 5D
0x0000BD50 58 59 57 53 4D 46 3B 33 2C 27 27 27 25 29 32 44
0x0000BD60 58 6A 78 7C 7E 75 6A 65 64 5D 5A 53 4D 4B 4B 50
0x0000BD70 57 5C 62 63 64 5F 5E 5B 57 53 54 54 53 54 4F 4C
0x0000BD80 4B 4A 4B 49 49 46 49 47 48 4A 51 56 5F 63 63 68
0x0000BD90 67 64 5F 5B 55 52 4B 46 42 41 42 3F 3D 3E 41 45
0x0000BDA0 46 4A 4C 4F 4E 49 49 46 41 3E 3B 37 32 32 31 30
0x0000BDB0 36 36 36 36 36 33 31 2E 2E 2A 29 26 24 23 21 22
0x0000BDC0 23 23 26 27 2B 2D 2D 35 36 36 36 35 32 34 31 34
0x0000BDD0 32 36 33 34 35 32 2F 28 30 33 31 35 32 33 33 35
0x0000BDE0 38 38 38 38 38 38 3A 3B 3C 3E 3C 3D 3E 41 40 41
0x0000BDF0 44 43 42 42 43 44 45 48 44 48 48 47 46 46 48 48
0x0000BE00 4B 4C 4D 4B 4E 4F 4E 50 51 51 51 51 51 51 54 55
0x0000BE10 58 5E 5F 67 6D 6C 6A 68 61 5C 58 55 54 52 49 43
0x0000BE20 3B 34 2E 2A 2B 2F 3B 48 57 6E 9B D5 FF FF FF FF
0x0000BE30 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BE40 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BE50 F9 F5 F6 F0 F3 EE EB E6 E4 E3 E5 DF DC D6 D5 D3
0x0000BE60 CD C8 C2 C5 BF B6 B6 B5 AF A9 A6 A2 9A 97 92 8E
0x0000BE70 8C 8C 89 87 82 7E 7C 7B 77 79 78 77 70 6C 69 67
0x0000BE80 68 63 65 63 5F 60 62 66 63 64 62 67 64 5E 5F 5D
0x0000BE90 60 5D 5C 5E 5B 5A 56 54 4E 44 3D 33 2D 29 27 28
0x0000BEA0 28 2A 30 43 56 64 77 7D 7B 73 6A 63 63 5D 59 53
0x0000BEB0 4D 51 51 56 59 5F 66 67 64 62 5E 5C 59 5B 59 5B
0x0000BEC0 5D 58 56 54 54 54 52 50 4E 50 4F 51 53 55 5B 5F
0x0000BED0 67 6B 6D 70 6B 68 62 5C 5A 5A 56 56 56 5B 62 60
0x0000BEE0 5F 57 52 4F 54 56 5C 5C 5B 56 55 4E 47 42 40 3A
0x0000BEF0 34 30 33 35 3D 40 3F 41 41 3E 38 34 30 2C 26 24
0x0000BF00 20 1F 1F 1D 1F 21 23 27 2A 2C 32 36 39 39 38 35
0x0000BF10 31 30 30 33 36 3B 39 38 3A 35 31 2E 30 33 32 33
0x0000BF20 36 38 35 35 37 35 39 35 37 3A 3A 3C 3E 3D 3F 3E
0x0000BF30 41 3F 42 42 44 42 42 43 43 43 43 47 45 46 47 48
0x0000BF40 49 47 46 49 49 4C 4C 4D 4C 4D 4E 4E 51 4F 50 50
0x0000BF50 51 54 53 51 56 58 65 66 6A 69 69 63 5F 5B 5A 58
0x0000BF60 57 53 4A 41 3B 33 2E 2C 2C 30 3A 48 57 71 9B CF
0x0000BF70 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000BF80 FF FF FF FF FF FF FF FF FF FF FF FF FF FF F7 FF
0x0000BF90 FD FF FC FC F4 EF F3 EF EE E4 E1 E3 DC DB DB DA
0x0000BFA0 D7 D4 D1 CD CE C4 C3 BB BB BA B2 B3 AA A6 A7 A1
0x0000BFB0 99 92 90 8D 8A 87 86 85 81 7B 7A 76 76 75 74 76
0x0000BFC0 74 6D 68 65 65 62 62 63 64 61 62 63 67 64 64 66
0x0000BFD0 5D 5F 61 5F 5D 5A 5C 5A 58 56 56 53 4F 47 3D 31
0x0000BFE0 2D 29 26 27 28 2A 30 44 57 65 72 7C 7D 74 69 62
0x0000BFF0 62 5D 59 55 53 53 53 56 5D 5F 62 64 62 5E 5C 5B
0x0000C000 5C 5C 62 61 5E 5A 5A 5A 5A 56 59 59 57 56 59 59
0x0000C010 5B 5A 5F 66 67 6B 71 6A 69 68 64 5F 5C 5D 65 69
0x0000C020 74 85 90 90 89 7F 6C 5D 5B 5E 5E 62 5E 5B 59 55
0x0000C030 4E 49 44 3F 39 33 32 39 43 48 4B 4E 4F 49 41 39
0x0000C040 31 2C 27 21 1D 1B 1B 1C 1D 1F 24 26 2A 2F 31 3B
0x0000C050 3D 3E 3A 33 2E 2B 2F 2F 35 39 3D 3D 3C 38 35 31
0x0000C060 30 31 35 37 35 35 36 35 37 38 39 3A 3A 3D 3A 3D
0x0000C070 3C 3D 3F 3E 3D 40 3F 42 41 46 42 44 44 45 47 44
0x0000C080 45 48 48 46 47 48 47 49 4B 4A 4A 4B 4E 4E 4E 4E
0x0000C090 50 4F 51 50 4E 51 51 52 55 5B 61 67 66 6D 69 65
0x0000C0A0 61 5E 5C 58 52 52 4A 43 3A 34 2D 2C 2C 30 3D 49
0x0000C0B0 56 6E 9B D3 FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C0C0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C0D0 FF FF FF FF FF FF FF FF FF F6 F1 EC EC E6 E4 D7
0x0000C0E0 DA D6 D6 D6 D8 D7 D1 CB C7 C5 C2 C0 BE BB B5 B3
0x0000C0F0 B2 A9 A3 9E 98 95 92 8C 89 86 88 84 81 7D 76 75
0x0000C100 79 74 72 70 6E 6D 68 64 64 5E 61 5E 62 63 63 64
0x0000C110 63 64 67 63 63 5F 5E 5D 5C 5C 5C 5C 59 56 57 52
0x0000C120 4C 47 3A 32 2E 2A 27 27 28 2B 32 43 56 63 71 7A
0x0000C130 79 71 6A 64 61 5C 5B 5B 56 57 54 58 5C 62 64 67
0x0000C140 60 5D 5C 5E 5F 61 62 63 64 60 5D 5E 5D 61 5C 62
0x0000C150 5E 60 60 60 61 5F 62 67 69 6A 6D 68 6A 68 64 62
0x0000C160 5F 64 70 82 97 AE B6 BA B2 9A 85 6D 62 62 61 64
0x0000C170 65 5E 5A 59 53 4B 48 46 3C 38 3A 3F 4B 56 5B 61
0x0000C180 5C 55 4B 3F 35 2B 26 1F 1E 1B 1C 1C 1D 1E 23 27
0x0000C190 2B 2F 36 3C 40 3F 3B 33 2D 2B 2C 33 36 3A 3D 40
0x0000C1A0 3D 3C 39 31 31 33 34 33 34 38 38 37 3B 3A 3A 3C
0x0000C1B0 3C 3E 3E 3D 40 3F 3E 3D 42 3F 42 43 41 43 43 43
0x0000C1C0 44 45 46 47 49 49 47 46 48 48 48 4A 4A 4A 4A 4E
0x0000C1D0 4C 4E 4D 4F 4F 4D 4F 50 50 4F 4F 4E 56 5C 61 67
0x0000C1E0 69 68 67 5E 5B 5A 58 57 52 4F 4A 42 3C 31 2E 2A
0x0000C1F0 29 31 3B 47 57 6C 99 D8 FF FF FF FF FF FF FF FF
0x0000C200 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C210 FF FF FF FF FF FF FF FF FF FD FD FC F5 F6 EE E9
0x0000C220 E2 DD CD CC D1 D1 CF D6 CE D4 D2 D2 CC C5 C4 C1
0x0000C230 BC BB B3 B1 AC A9 A5 A1 9B 95 8F 8E 87 87 88 84
0x0000C240 80 7A 74 76 74 73 71 73 6E 6B 69 64 61 5F 5D 5F
0x0000C250 62 62 63 66 64 64 66 61 61 61 5D 5B 5B 5B 5A 59
0x0000C260 57 57 54 52 4E 47 3C 33 2C 28 28 27 2B 2F 36 43
0x0000C270 53 64 6D 78 7B 70 69 64 64 5E 59 58 55 56 56 5A
0x0000C280 5F 63 66 67 64 60 5F 61 61 5E 5F 66 64 63 61 5F
0x0000C290 5D 5E 63 65 65 66 63 66 62 5D 5E 62 60 62 67 67
0x0000C2A0 6A 64 63 61 67 6D 7D 8F AA BE CA C6 BA A4 89 6E
0x0000C2B0 64 62 67 62 61 62 60 58 55 4B 4C 48 41 3A 39 44
0x0000C2C0 4E 5B 64 6B 69 5E 4F 42 36 2C 28 21 1D 1C 1C 1C
0x0000C2D0 1D 1F 21 26 2B 32 36 3C 3F 3F 39 33 2D 2B 2D 2F
0x0000C2E0 32 35 3D 3C 3D 3A 38 31 31 30 36 33 34 36 37 39
0x0000C2F0 39 3C 3A 3B 3D 3B 3E 3F 40 41 3F 41 42 42 44 42
0x0000C300 44 44 46 47 45 45 46 45 48 47 48 4A 48 49 4A 47
0x0000C310 4A 49 4B 4C 4D 4F 4C 50 4D 4E 50 4E 4D 4F 4F 53
0x0000C320 57 5C 63 63 66 68 69 61 5E 5B 55 56 54 51 48 42
0x0000C330 3B 35 2D 2B 2C 32 39 48 58 6E 9B D7 FF FF FF FF
0x0000C340 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C350 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C360 FC F2 F0 E9 DC D5 D1 C7 C4 C7 C9 CC D3 D0 D2 D0
0x0000C370 C9 C6 C0 BE BE BA B6 AF B1 A8 A4 9D 9B 92 91 8A
0x0000C380 8A 83 85 83 7C 7C 72 73 72 72 71 70 6F 69 69 65
0x0000C390 65 5F 5F 5F 60 60 60 63 64 62 64 63 5F 60 5C 5B
0x0000C3A0 57 58 58 57 57 57 54 52 4F 47 3F 33 2E 29 29 2B
0x0000C3B0 2D 2E 33 45 54 63 6E 77 76 72 68 63 5F 5C 59 56
0x0000C3C0 55 54 57 5A 60 65 64 67 65 5F 5F 5F 5F 5D 62 63
0x0000C3D0 63 60 5F 5F 5C 5E 62 65 67 64 66 63 5E 5E 5A 5A
0x0000C3E0 5E 61 64 67 65 65 67 63 67 6D 7E 8C A5 BA C1 BC
0x0000C3F0 AE A0 7F 69 5E 61 62 64 63 60 5C 57 51 4C 49 44
0x0000C400 41 3D 3D 45 4F 60 67 69 69 5C 50 42 38 2F 26 1F
0x0000C410 1D 1C 1B 1D 1E 21 21 26 29 2E 36 3A 39 39 35 2F
0x0000C420 2B 28 2A 2B 2F 33 36 38 38 38 33 30 31 33 32 33
0x0000C430 34 35 36 3A 38 39 3D 3C 3E 3D 3C 3F 3F 40 41 3F
0x0000C440 42 42 42 44 43 44 46 44 47 48 46 48 47 48 46 48
0x0000C450 49 4A 48 47 4A 4D 4C 4A 4D 4D 4C 4B 4D 4D 4C 4C
0x0000C460 4E 4F 51 4E 55 5B 5E 64 6A 69 67 62 5D 59 57 56
0x0000C470 53 4F 48 41 39 32 30 2B 2B 2F 3B 48 54 6D 9B D4
0x0000C480 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C490 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C4A0 FF FD F7 FA FA F3 EB E2 D6 CC C7 C0 BE BE BF C8
0x0000C4B0 CA CD CC CD CA C5 C1 C3 C2 B9 B8 B3 B0 AD A7 A1
0x0000C4C0 9E 98 8F 8E 8A 84 85 7F 7A 77 70 72 70 6F 6F 6D
0x0000C4D0 6C 68 68 64 61 60 5E 60 5F 5E 61 63 63 64 63 61
0x0000C4E0 61 5D 5E 59 59 57 59 57 53 53 53 52 4D 48 41 35
0x0000C4F0 2E 28 29 2B 2B 2D 33 43 52 62 6D 74 75 73 69 62
0x0000C500 60 5E 5D 57 54 54 56 59 5F 64 67 69 62 62 61 5D
0x0000C510 5E 60 61 61 62 61 5D 5C 5C 5A 5E 60 64 60 5E 5C
0x0000C520 5A 57 53 4F 55 5F 5E 64 64 64 66 61 64 6A 75 80
0x0000C530 92 A3 A8 A0 94 84 6B 5C 56 5A 5C 5F 5A 59 55 53
0x0000C540 4D 47 47 42 3E 39 3A 42 4B 58 5D 5E 5D 53 49 3D
0x0000C550 2F 2C 25 1F 1C 1D 1D 1D 1F 21 23 26 29 2D 2E 34
0x0000C560 34 32 2F 29 24 25 27 2A 2B 2D 31 31 32 31 2E 2B
0x0000C570 31 34 34 30 34 34 34 35 39 39 3B 3C 3F 3B 3F 3D
0x0000C580 3F 3F 42 3F 41 41 46 44 47 47 46 48 4A 46 49 47
0x0000C590 47 46 47 4A 47 49 4B 4A 48 4A 4E 4A 4C 4C 4C 4B
0x0000C5A0 4D 4C 4D 4A 4E 4E 4E 4F 59 5C 60 64 68 69 64 61
0x0000C5B0 5C 5A 56 54 53 4D 45 3F 39 33 2E 2C 2B 31 3D 49
0x0000C5C0 55 6E 9A CE FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C5D0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C5E0 FF FF FF FF FF FF FF FF FA F4 EC E1 D6 C9 BF BC
0x0000C5F0 BA BB BD C5 C8 CD CA CD CC C7 C8 C0 BF BB B6 B4
0x0000C600 AE AB A3 A3 9F 94 90 88 8A 84 85 7F 7B 73 71 6A
0x0000C610 71 6B 6F 6C 68 67 65 64 62 5F 61 5E 5A 5F 61 60
0x0000C620 62 61 61 60 61 5E 5C 5B 5A 58 55 58 55 55 52 54
0x0000C630 4D 47 40 35 2F 2C 29 2A 2C 2F 33 41 4F 5B 68 73
0x0000C640 72 71 67 62 61 5F 5C 57 57 56 57 59 5E 63 66 65
0x0000C650 64 61 60 5D 5C 5C 5A 5C 5D 57 55 57 59 58 57 59
0x0000C660 5C 59 57 55 52 4F 4B 4A 4C 51 57 5D 5D 62 63 5E
0x0000C670 5F 64 69 6D 72 7B 82 7B 6F 62 56 4C 4B 50 4E 53
0x0000C680 50 4F 4D 4A 46 41 3E 3D 39 35 38 3D 47 4D 53 51
0x0000C690 4E 44 3B 34 2C 28 23 20 21 1F 20 21 23 24 27 28
0x0000C6A0 2B 2D 2E 2F 2F 2C 29 24 22 22 23 26 27 29 2C 2D
0x0000C6B0 2D 2C 2B 25 2E 30 32 31 31 34 36 38 38 39 39 3A
0x0000C6C0 39 3C 3F 3D 3E 42 41 43 45 43 44 44 45 4A 47 47
0x0000C6D0 47 48 48 48 48 49 48 48 4A 49 4A 49 4C 4B 4A 4B
0x0000C6E0 4B 4A 4B 4B 4D 4B 4C 4C 49 50 51 52 57 5B 63 65
0x0000C6F0 66 65 65 61 5C 59 56 54 50 4D 47 3E 3A 31 31 2B
0x0000C700 2C 32 3C 47 55 6D 98 C9 F8 FF FF FF FF FF FF FF
0x0000C710 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C720 FF FF FF FF FF FF FF FF FF FE F5 FA F6 F0 EC DA
0x0000C730 D3 CA BB BA BA B9 BE C4 C5 CC CA CE C4 C4 C3 BF
0x0000C740 BF BC BA B4 AC AC A6 9D 9A 94 8E 8C 89 86 83 7A
0x0000C750 76 75 6F 6F 71 68 6B 69 69 69 65 61 61 5E 5E 5E
0x0000C760 5B 5F 5D 5E 62 61 64 62 62 5F 5B 5A 59 59 57 56
0x0000C770 55 53 54 51 4E 47 3E 35 2F 2B 2A 2B 2B 2F 33 3F
0x0000C780 4F 58 65 72 73 6D 69 62 5F 5E 5C 56 54 50 52 55
0x0000C790 5C 61 64 66 62 5E 5D 5B 59 59 53 54 56 51 4F 4E
0x0000C7A0 4E 4E 51 50 51 51 4C 4B 4C 4B 47 47 46 4A 50 56
0x0000C7B0 57 59 5C 58 56 5B 5C 5A 5D 5C 59 57 50 47 44 41
0x0000C7C0 42 45 47 48 49 47 45 40 3D 39 39 38 35 34 35 39
0x0000C7D0 41 42 43 43 3E 39 32 2D 2A 28 27 24 24 23 25 26
0x0000C7E0 29 2B 2A 2C 2E 2D 2E 2F 2E 28 26 24 24 21 24 24
0x0000C7F0 25 28 2A 2C 2C 2B 29 27 31 32 32 32 33 34 33 36
0x0000C800 38 39 3B 3C 3C 3B 3B 3E 3D 42 43 45 46 46 45 47
0x0000C810 45 48 49 48 4A 48 4D 4C 4A 4A 4A 4B 48 49 4C 49
0x0000C820 4C 4A 4E 4A 4B 49 4C 4A 4B 4C 4D 4C 4F 4C 4D 4D
0x0000C830 54 5C 5E 65 66 66 61 5C 5A 57 56 53 52 4C 45 40
0x0000C840 3A 30 2E 2D 2D 33 3A 4A 54 6C 94 CA FF FF FF FF
0x0000C850 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C860 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FC FF
0x0000C870 F6 F5 ED E2 D7 CC C4 BD BD B7 BC C1 C8 C7 C6 C7
0x0000C880 C6 C1 C2 BC BC B4 B1 B0 AD AA A5 9B 98 92 8C 86
0x0000C890 83 7F 7E 76 74 72 6E 6D 69 6B 6A 6A 67 67 65 64
0x0000C8A0 5F 5C 5D 59 58 5C 5C 5D 60 61 61 61 5F 5D 59 57
0x0000C8B0 59 55 57 59 55 55 54 51 50 49 3F 36 2F 2B 29 2B
0x0000C8C0 2A 2D 2F 3A 4B 55 63 6D 72 6D 65 62 62 5D 5B 56
0x0000C8D0 53 51 4E 53 58 5B 62 67 65 5D 5C 5B 57 4E 4B 4B
0x0000C8E0 49 48 47 4A 47 47 49 49 49 47 49 44 47 43 43 42
0x0000C8F0 42 45 4A 4E 4F 52 54 52 51 53 52 4E 4A 48 44 40
0x0000C900 3C 39 36 3A 3E 3E 41 40 41 3F 3B 39 33 31 33 31
0x0000C910 32 33 34 36 3A 3B 3A 35 33 32 2F 2C 2D 29 29 28
0x0000C920 2A 29 2B 29 2D 2D 2D 2F 2E 2E 2B 2C 2D 2A 28 25
0x0000C930 23 22 23 24 26 26 2C 2B 2F 31 2F 2D 30 31 31 31
0x0000C940 32 35 36 35 35 39 36 3B 3B 3C 3D 3E 3F 42 3F 44
0x0000C950 45 45 47 46 44 49 47 49 4C 4D 4C 4C 4E 4B 4A 4A
0x0000C960 4C 4B 4D 49 49 49 4C 49 4A 49 4A 4B 4A 4C 4D 4C
0x0000C970 4E 51 4D 52 55 59 5D 64 65 65 61 61 5A 54 54 53
0x0000C980 52 4D 45 3D 38 2E 30 2C 2C 32 39 46 54 6A 92 C1
0x0000C990 F6 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000C9A0 FF FF FF FF FF FF F9 FF FF FF FF FF FF FC FF FF
0x0000C9B0 FB FA F3 F5 F0 EA EB DE D3 D3 C5 C3 C3 C1 C1 C3
0x0000C9C0 C0 C3 C6 BF C2 C0 BF B9 BB B9 B3 AD AE A6 A1 9A
0x0000C9D0 90 90 86 83 81 7E 7B 76 74 73 6D 6A 69 69 67 66
0x0000C9E0 67 65 62 5F 5D 5E 5A 58 5A 5C 5B 5D 5E 5F 5E 5E
0x0000C9F0 5F 5D 5C 59 56 58 54 57 57 55 52 53 4D 48 3F 35
0x0000CA00 2E 2A 28 29 28 29 2D 36 47 54 5E 69 6E 6E 65 64
0x0000CA10 63 5E 5C 56 4E 49 4A 4E 51 5A 62 65 61 5E 59 56
0x0000CA20 50 49 46 44 44 42 41 43 41 44 43 43 46 43 42 42
0x0000CA30 41 43 42 41 42 47 47 4A 4B 4F 50 4E 49 49 48 46
0x0000CA40 3F 3C 36 34 31 2F 34 34 3B 3B 3F 3F 3E 3B 34 34
0x0000CA50 32 31 2E 30 31 32 34 37 34 35 31 31 2E 2D 2C 2B
0x0000CA60 2A 2C 2B 2A 2B 2D 2C 2C 2C 2D 32 2E 2D 2D 2E 2E
0x0000CA70 30 2E 2B 27 25 23 24 25 25 28 2D 2F 35 36 34 34
0x0000CA80 2E 2F 30 32 32 34 34 38 35 36 3B 3A 3D 3C 3D 3D
0x0000CA90 40 42 44 43 44 45 48 46 46 49 47 4A 4B 4B 4D 4C
0x0000CAA0 4E 4C 4A 4D 4E 4B 4B 4B 4D 49 4D 4A 4D 4D 4D 4C
0x0000CAB0 4D 4D 4B 4D 4E 50 4F 51 55 5A 5D 64 64 62 61 5D
0x0000CAC0 59 57 53 52 50 4B 44 3E 39 33 2E 2C 2D 30 3B 45
0x0000CAD0 53 6A 91 C6 FA FF FF FF FF FF FF FF FF FF FF FF
0x0000CAE0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000CAF0 FF FF FF FF FF FD F9 F5 F2 EB E9 E0 D6 D1 CF C6
0x0000CB00 C2 C4 C0 C2 BE C3 C3 C0 BE BA B8 B9 B9 B2 AD AC
0x0000CB10 A9 A2 9D 92 8C 85 84 7E 7C 79 7A 73 71 71 6B 6A
0x0000CB20 67 69 66 65 64 65 5F 61 5C 5A 59 5A 59 5C 59 5B
0x0000CB30 5B 5B 5E 5C 5F 5B 5B 5B 56 58 58 57 55 56 53 50
0x0000CB40 4E 46 3E 35 2E 28 28 26 25 26 2B 35 45 52 60 67
0x0000CB50 6D 6C 67 63 5F 5C 59 52 4C 47 47 4A 4F 57 5D 62
0x0000CB60 60 5C 5A 55 4D 48 42 41 3D 3D 40 43 3F 41 41 42
0x0000CB70 43 40 40 41 3F 43 41 3F 41 45 45 48 4B 4B 4D 4C
0x0000CB80 4B 48 45 42 3C 36 31 2F 2E 31 33 36 3A 3D 3F 41
0x0000CB90 3F 3C 36 34 32 30 2F 2F 31 32 33 34 35 32 2F 2E
0x0000CBA0 2C 2C 2A 2D 2A 2B 2A 2B 2C 2A 2A 2A 2C 30 2F 2F
0x0000CBB0 2D 2D 2F 32 33 30 2F 2D 29 24 24 24 27 2A 31 33
0x0000CBC0 35 38 35 34 2B 2E 30 31 33 34 34 34 34 37 39 3A
0x0000CBD0 39 3D 3E 3E 3F 41 42 45 44 44 47 46 46 48 49 49
0x0000CBE0 4B 4B 4E 4C 4B 4D 4D 4E 4E 4D 4C 4B 4D 4C 4D 4E
0x0000CBF0 4D 50 4D 4E 4F 4A 4D 4D 4F 4E 4E 53 54 5A 5E 60
0x0000CC00 61 62 62 5B 58 57 52 53 4F 4D 46 3E 35 32 31 2D
0x0000CC10 2F 34 3D 46 54 6C 90 C5 F3 FF FF FF FF FF FF FF
0x0000CC20 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000CC30 FF FF FF FF FF F9 EE FB F4 F5 F3 ED EC E9 E6 DE
0x0000CC40 DD D2 CE CB C7 C8 C2 C2 C1 BD C3 BE C1 BD BB B4
0x0000CC50 B5 AF AE AD A7 A3 9C 94 8D 7F 7D 7B 79 78 74 73
0x0000CC60 6D 6D 6A 69 69 65 63 66 63 63 62 5E 5A 5B 5A 58
0x0000CC70 5A 57 5A 5B 5D 5E 61 62 5D 5D 5A 58 57 58 57 57
0x0000CC80 57 58 54 52 4E 48 40 38 30 29 27 26 26 27 2A 32
0x0000CC90 46 52 5E 67 6E 6C 66 63 62 60 5C 53 4C 43 45 45
0x0000CCA0 4B 56 5D 61 5E 59 58 52 4D 47 43 41 3F 3C 3D 3E
0x0000CCB0 3F 3F 42 44 44 44 40 42 42 43 41 42 44 49 4A 4C
0x0000CCC0 4B 4C 4A 4E 49 48 45 42 3C 3B 36 34 34 36 3B 3B
0x0000CCD0 40 42 47 46 45 41 3F 3A 38 36 34 32 31 31 2F 33
0x0000CCE0 32 33 32 32 31 2F 2C 2F 2C 2A 2A 27 28 28 28 27
0x0000CCF0 27 2A 2A 2A 2B 2B 2D 30 35 35 32 2F 29 25 23 25
0x0000CD00 26 2B 30 33 34 35 32 2E 2E 2D 2F 2F 32 32 33 36
0x0000CD10 35 38 38 37 3A 3A 3A 3F 3D 3F 42 43 41 45 41 46
0x0000CD20 47 46 49 49 4B 4B 4B 4B 4D 4E 4D 51 4C 4F 4D 4F
0x0000CD30 4C 4E 4D 4D 4E 4C 4D 4F 4D 4D 4D 4E 4D 4D 4F 50
0x0000CD40 55 58 5D 60 60 5D 5D 5B 59 52 52 52 4E 4A 43 3E
0x0000CD50 38 32 2E 2C 2D 33 3E 47 55 6F 92 C9 FD FF FF FF
0x0000CD60 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000CD70 FF FF FF FF FF FF FF FF FF FF FF FF FD F9 F6 EE
0x0000CD80 EE E9 EA E4 E0 D5 D1 CF CB C7 C3 C4 C2 C3 BC BD
0x0000CD90 BB BD B8 BA B4 B9 AF AE A5 A1 9B 8E 87 84 7F 7A
0x0000CDA0 78 74 73 71 6E 6C 68 68 65 63 63 61 61 5F 61 5E
0x0000CDB0 5A 58 59 58 53 56 59 5B 5C 5D 5E 61 5F 5C 5A 57
0x0000CDC0 59 59 5A 58 57 56 54 4F 4F 49 41 38 2D 28 26 26
0x0000CDD0 26 26 2B 36 41 53 5A 64 6D 6A 65 65 61 5E 5B 52
0x0000CDE0 48 44 41 43 4B 52 58 5F 5C 58 54 54 4D 48 43 42
0x0000CDF0 3F 3C 3E 3C 3E 43 43 47 48 49 45 48 45 44 47 45
0x0000CE00 47 4C 50 51 50 53 4D 4F 4E 4D 47 47 47 47 47 48
0x0000CE10 49 44 46 48 47 49 4B 4C 4D 4A 45 45 42 3C 3E 34
0x0000CE20 31 30 30 32 32 35 35 3A 3A 39 39 34 30 2C 2C 27
0x0000CE30 25 23 22 21 22 24 26 27 26 2D 2E 30 32 34 34 2F
0x0000CE40 29 28 27 25 29 2D 2F 32 32 31 2F 2A 2C 2C 2E 2E
0x0000CE50 31 30 32 33 34 36 36 39 37 3A 3C 3C 40 42 40 3F
0x0000CE60 41 43 41 46 46 45 48 46 4B 4A 49 4A 4B 4C 4E 4D
0x0000CE70 4D 4F 4F 4E 4D 4F 4C 4E 51 4E 52 51 50 4B 51 51
0x0000CE80 4D 4E 51 53 56 5A 5B 5F 5E 63 5E 5C 59 55 51 50
0x0000CE90 4D 4B 44 3E 36 32 2C 2B 2E 33 3E 47 56 6D 99 C7
0x0000CEA0 F3 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000CEB0 FF FF FF FF FF FF FF FF FF FF FF FF F7 FB FB F1
0x0000CEC0 F4 F2 EF ED EA E6 E4 E2 DF D9 CD C5 C6 C4 C7 C7
0x0000CED0 C5 BF C1 BE BE BB B6 B8 B6 B2 AC A8 A7 9D 98 8D
0x0000CEE0 86 82 7A 79 75 73 75 72 6E 6B 69 6A 64 64 64 63
0x0000CEF0 62 61 5F 5B 5B 59 59 55 57 57 5A 59 59 5C 5E 5F
0x0000CF00 5C 5C 5F 5B 5A 5A 5A 5B 57 57 53 55 4F 48 41 35
0x0000CF10 2D 28 24 24 26 26 2A 33 41 4F 5A 5F 66 69 65 63
0x0000CF20 63 5D 58 51 47 3F 3F 44 48 50 53 5C 5A 58 53 4F
0x0000CF30 4C 46 45 43 40 3D 3E 3E 3F 42 47 4B 4F 4E 4E 50
0x0000CF40 4E 4A 4B 4C 4E 50 56 57 56 54 52 51 4E 4F 4F 50
0x0000CF50 57 59 64 68 6B 69 65 5D 58 53 55 54 51 50 4D 4D
0x0000CF60 49 47 41 3C 33 2F 30 31 34 3B 3F 42 45 49 46 41
0x0000CF70 39 32 2C 25 21 20 1C 1F 1F 1F 20 22 26 2A 2B 2F
0x0000CF80 34 34 33 2F 2C 2B 2A 2B 2E 30 33 31 33 2F 2E 2B
0x0000CF90 2B 2C 2C 30 2F 30 32 32 33 38 36 39 39 38 3D 3C
0x0000CFA0 3C 3D 41 3F 41 45 43 46 44 46 45 47 4A 49 4B 4A
0x0000CFB0 4A 4A 4B 4E 4E 4C 50 4C 50 51 54 50 53 51 51 53
0x0000CFC0 52 51 4F 4E 51 4E 52 55 58 56 5C 5E 60 5F 5E 5B
0x0000CFD0 53 56 53 50 4E 47 43 3D 35 32 2D 2D 31 32 3F 48
0x0000CFE0 53 6D 9A CF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000CFF0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000D000 FF FE FC F8 FA EF ED EF EA EA E6 DE D9 D3 C9 C3
0x0000D010 C0 C3 C2 C1 C5 C1 B8 BB BE B8 B4 B3 B4 AF AB A7
0x0000D020 A5 9A 93 8A 84 80 7A 79 74 73 6F 6E 6D 6B 6A 67
0x0000D030 69 66 64 63 66 63 61 60 5D 58 58 55 56 53 54 5A
0x0000D040 5C 5B 5D 5E 5D 5E 5C 5A 5B 5A 58 59 59 56 56 52
0x0000D050 51 48 41 35 2D 27 26 26 26 26 2A 34 3E 49 53 5B
0x0000D060 64 62 5E 5D 5E 5A 56 4D 42 3E 3E 41 47 50 58 5B
0x0000D070 5B 56 53 4F 4B 48 45 43 41 3E 3F 41 42 44 48 48
0x0000D080 52 55 58 56 54 51 4F 4E 50 54 54 58 58 57 54 52
0x0000D090 54 53 5A 63 6C 7A 88 94 95 90 87 74 62 59 55 54
0x0000D0A0 55 52 55 52 50 4A 47 3C 36 31 2F 34 38 3E 4A 51
0x0000D0B0 56 58 54 4C 42 34 2D 26 20 1F 1D 1C 1C 1F 20 22
0x0000D0C0 25 28 2C 2F 31 35 36 31 2F 32 32 32 33 32 35 35
0x0000D0D0 36 33 33 2C 2B 2C 2D 30 2E 2E 30 32 33 33 34 35
0x0000D0E0 39 38 39 3C 3D 3E 3F 3E 3F 40 41 43 44 44 47 46
0x0000D0F0 49 47 4A 4B 4A 47 4C 4C 4B 4E 4E 4F 4E 4F 4D 4E
0x0000D100 50 55 51 51 50 51 52 52 52 54 55 55 58 59 5D 5C
0x0000D110 5F 5D 5E 58 55 52 55 4F 4C 48 40 3B 34 32 2F 2D
0x0000D120 2F 32 3D 4B 57 6F 99 CD F6 FF FF FF FF FF FF FF
0x0000D130 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000D140 FF FF FC F4 F4 F2 E8 EB ED EB E0 E7 E2 E0 E0 DB
0x0000D150 D1 C7 BE BE B3 B8 BF BC BD BA BA B5 B9 B6 B4 B1
0x0000D160 AE AB A9 A5 9E 9C 91 85 81 7E 7C 73 74 76 77 74
0x0000D170 6F 6E 6C 69 67 68 67 65 64 65 62 5D 5A 5A 57 56
0x0000D180 57 56 59 58 5A 5A 5B 5F 61 5B 5D 5B 59 59 58 5A
0x0000D190 59 58 55 54 50 49 41 36 2F 29 26 24 25 26 29 32
0x0000D1A0 3A 43 4A 52 5A 5A 57 57 56 53 52 48 3F 3C 39 3F
0x0000D1B0 48 4F 56 5A 57 57 54 4C 4A 48 47 44 44 3F 40 3D
0x0000D1C0 3F 42 47 4B 52 57 59 59 58 54 4F 4D 50 56 58 5B
0x0000D1D0 5A 56 55 54 56 57 61 6F 7B 92 AB B9 B6 B0 A4 8D
0x0000D1E0 72 61 59 57 55 57 5B 58 57 51 49 40 3A 33 2F 35
0x0000D1F0 3B 45 52 5B 5E 62 5D 57 49 39 2F 26 22 1D 1B 1D
0x0000D200 1B 1E 1F 21 26 29 2B 30 33 38 39 38 36 38 37 36
0x0000D210 3A 3A 39 3A 3A 37 38 32 2B 2A 2B 2C 2F 2F 2E 32
0x0000D220 31 33 35 34 37 39 39 3D 3C 3D 3D 3D 40 42 42 42
0x0000D230 42 45 46 47 44 49 49 4A 49 49 4B 4B 4D 4E 4E 4E
0x0000D240 51 4E 4C 52 52 51 53 54 50 53 52 52 52 52 54 57
0x0000D250 59 5B 5D 5D 5E 5C 5C 58 53 54 52 50 4B 48 41 3D
0x0000D260 35 33 30 2F 2E 33 41 49 59 70 9F CD FF FF FF FF
0x0000D270 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000D280 FF FF FF FF FF FF F6 F3 E9 E1 E2 E3 DD E1 DE DB
0x0000D290 DB DB D7 D6 CB BE BA B6 B2 B2 B9 B8 BB BB B3 B2
0x0000D2A0 B4 B3 AF AE A9 A9 A4 A2 9C 94 8E 89 81 7B 76 79
0x0000D2B0 77 7A 76 75 74 72 71 6D 69 68 66 69 6A 64 65 62
0x0000D2C0 5C 57 57 56 4F 53 54 53 59 5D 5C 5F 5C 5E 5C 5B
0x0000D2D0 59 5A 5A 57 59 58 56 55 4F 4A 42 35 31 28 27 26
0x0000D2E0 26 27 28 2E 35 3C 3F 46 4E 51 4F 4C 4D 46 45 3E
0x0000D2F0 39 36 39 3D 46 4F 56 59 5A 58 53 4E 49 47 46 45
0x0000D300 43 45 41 42 41 41 44 4C 51 57 5C 59 57 54 51 50
0x0000D310 4F 57 58 5D 58 57 57 57 53 59 63 70 87 9D B6 C3
0x0000D320 C0 BF AE 93 78 63 60 5C 5B 5C 5E 5A 57 52 47 42
0x0000D330 3A 32 30 32 3E 46 51 5C 61 61 5E 56 49 3B 2C 28
0x0000D340 21 1F 1C 1A 1C 1E 20 22 25 28 2D 30 36 3A 3C 3B
0x0000D350 3C 3E 3D 3B 3D 3D 3F 3E 3F 3A 3A 36 2B 2B 2B 2C
0x0000D360 2E 2E 2E 2F 31 32 34 34 36 38 39 38 3C 3C 3D 41
0x0000D370 3E 41 41 40 42 42 45 45 45 47 47 46 47 47 4B 4B
0x0000D380 4B 4B 4D 50 4F 4E 50 4F 52 50 51 54 52 52 53 51
0x0000D390 53 51 55 56 5B 5C 5B 5C 5C 5D 5A 55 56 53 4F 4C
0x0000D3A0 4D 47 3F 3B 36 31 2E 2D 2E 32 3E 48 55 71 9A CC
0x0000D3B0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000D3C0 FF FF FF FF FF FF FF FF FF F5 EB E3 DE D2 D6 D7
0x0000D3D0 D3 D3 D1 CE D1 D1 D1 C8 C4 C0 B3 B0 B0 B2 B3 B4
0x0000D3E0 B1 B2 B0 B4 B1 AD B0 AA AA A4 A2 9E 9C 94 8C 88
0x0000D3F0 7F 7A 75 78 7B 79 78 73 75 72 74 71 6D 6D 68 69
0x0000D400 6A 6A 63 5E 5D 58 56 55 52 52 53 54 55 59 5A 5A
0x0000D410 5A 5E 5B 5C 59 58 59 58 5A 5A 58 54 4E 49 40 36
0x0000D420 31 2A 26 25 25 25 27 2B 32 35 3A 41 43 44 46 43
0x0000D430 44 3D 3B 36 32 31 34 3A 45 4A 57 5A 58 57 53 4A
0x0000D440 47 47 43 47 46 46 44 43 43 43 44 48 53 57 58 58
0x0000D450 57 53 53 52 50 55 58 5A 5A 55 57 54 51 54 60 6A
0x0000D460 7B 8E A7 BA BB B2 AB 97 76 68 5C 5C 61 5C 5B 5B
0x0000D470 55 4E 46 3E 38 33 2F 34 3D 45 4D 58 5A 5B 56 4F
0x0000D480 42 35 2D 25 22 1E 1D 1B 1C 1F 1F 23 24 29 2E 31
0x0000D490 39 3E 40 40 3F 41 42 3F 3F 40 41 40 40 3D 3C 35
0x0000D4A0 29 2A 2B 2C 2D 2E 2E 2F 2D 31 32 32 34 35 39 38
0x0000D4B0 3A 38 3C 3B 3E 3E 3F 41 3F 41 42 41 46 45 44 45
0x0000D4C0 47 47 4A 4A 4B 4D 4D 4C 4D 4F 4F 4E 4F 55 54 53
0x0000D4D0 55 52 54 51 50 54 54 54 5A 5C 5A 5D 5C 5C 5A 57
0x0000D4E0 54 53 4E 4B 49 45 43 39 34 31 2F 2C 31 36 41 4A
0x0000D4F0 58 6F 99 CC FA FF FF FF FF FF FF FF FF FF FF FF
0x0000D500 FF FF FF FF FF FF FF FF FF FF FF FF FD F4 E8 D9
0x0000D510 D5 CC CC CD CB CC CC CD CB C7 CB C6 C7 BA B7 B3
0x0000D520 B0 B6 B5 B4 B0 AC AD AE B1 AD AD A9 A8 A7 A3 A0
0x0000D530 9C 99 8E 84 7E 7A 75 7C 7C 7A 7B 78 73 78 74 75
0x0000D540 73 74 6F 6C 6C 6A 65 63 5D 58 52 53 50 52 52 52
0x0000D550 55 58 5B 5A 5A 5D 5A 5A 5A 59 5B 58 55 58 55 52
0x0000D560 50 49 3E 3A 2D 28 26 26 25 24 26 27 2D 33 34 39
0x0000D570 3B 3E 3C 3B 38 36 32 2F 2D 2E 33 3C 44 4D 57 58
0x0000D580 59 55 4E 4B 47 46 48 48 49 45 47 45 48 44 46 4D
0x0000D590 51 54 56 57 56 52 52 52 51 53 59 5C 56 57 54 52
0x0000D5A0 51 50 58 60 67 76 8B 9B 9A 95 8E 81 6A 5F 59 5B
0x0000D5B0 5B 5E 59 55 51 48 42 39 33 32 30 34 39 41 46 4C
0x0000D5C0 50 4B 49 41 3A 2F 2C 25 21 1E 1F 1E 1F 21 23 25
0x0000D5D0 27 2B 2E 34 3C 3E 41 42 46 43 44 45 44 45 42 41
0x0000D5E0 42 3F 3C 39 28 28 29 2A 2A 2D 2D 2D 2D 31 32 30
0x0000D5F0 35 35 35 35 35 39 3A 3B 3E 3C 3E 3F 41 42 42 42
0x0000D600 43 44 47 45 48 46 47 4A 4A 4E 4D 4E 4D 4E 4E 4F
0x0000D610 4F 52 50 54 54 4F 53 53 52 51 55 57 5B 58 5B 5A
0x0000D620 5D 5A 58 56 53 4E 4D 4D 4A 47 3F 3B 36 32 2D 2E
0x0000D630 2E 34 3E 4A 57 6F 98 CB F8 FF FF FF FF FF FF FF
0x0000D640 FF FF FF FF FF FF FF FE FF FF FF FF FF FF FF FF
0x0000D650 EE EA E1 DA CD C6 C9 CB C5 C3 BC C5 C3 C6 C6 C7
0x0000D660 C4 BC BA B9 B5 B3 B5 B1 AF AD AD AB AD B0 B1 A8
0x0000D670 AB A6 A4 9B 9C 98 8B 89 81 7C 7D 78 7D 7B 7A 7A
0x0000D680 79 7C 7A 79 76 75 73 71 6F 6B 66 5E 5C 57 56 4F
0x0000D690 55 52 54 53 55 57 56 58 5A 5A 5B 5B 5A 58 5C 57
0x0000D6A0 59 59 57 53 51 4A 41 37 2F 2A 25 25 25 26 23 26
0x0000D6B0 2B 2D 31 33 39 39 39 36 34 30 2D 2C 2C 2B 31 39
0x0000D6C0 40 4A 4E 56 54 4E 4C 47 44 41 46 4C 4A 4B 49 4A
0x0000D6D0 48 46 49 4C 51 53 53 52 52 51 4E 4E 4D 4D 4F 52
0x0000D6E0 54 51 50 52 50 4E 4F 50 59 5D 66 75 70 6E 69 67
0x0000D6F0 59 52 54 53 53 51 4D 4A 45 3D 3B 34 32 2D 2E 30
0x0000D700 33 3C 40 44 43 3E 39 34 2E 2B 26 27 25 23 22 24
0x0000D710 25 26 26 28 29 2D 2E 35 3C 40 44 44 45 44 44 44
0x0000D720 43 46 43 41 44 3E 3D 3C 29 29 2A 2C 2C 2D 2C 2D
0x0000D730 2F 2F 31 32 32 34 35 36 35 39 3A 3A 3C 3A 3B 3C
0x0000D740 3E 3F 42 41 42 44 43 44 47 46 48 48 4A 48 4C 4C
0x0000D750 4B 4A 4D 4D 4F 52 52 53 54 52 54 56 54 53 55 57
0x0000D760 5D 58 5B 59 5A 5A 56 54 51 4F 4E 4B 4A 44 40 3C
0x0000D770 38 31 2E 2F 30 34 40 48 57 70 99 CD FE FF FF FF
0x0000D780 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000D790 FF FF FF FF F6 EA E1 D3 CE C7 CB CD C1 C0 C1 C4
0x0000D7A0 BF C3 C5 CA C8 BF BF C0 B9 BC B6 B7 B2 AD AC B2
0x0000D7B0 AE B2 B1 AC AC A8 A4 A0 99 95 8F 88 82 7F 7C 7A
0x0000D7C0 7A 79 7A 7A 77 7E 7B 7E 79 76 73 71 6E 6A 66 5E
0x0000D7D0 5A 56 53 51 52 4F 52 55 55 57 56 57 59 5B 5C 5B
0x0000D7E0 5B 5A 5A 5B 5A 59 56 55 52 49 44 39 32 2A 27 27
0x0000D7F0 25 24 25 27 28 2D 2F 32 36 34 32 33 31 2F 2A 29
0x0000D800 2A 2B 2F 32 3D 42 49 4E 4F 4C 46 42 40 3F 46 47
0x0000D810 4D 4C 4D 4E 49 47 47 4A 4E 4E 52 4E 4B 4B 4A 4A
0x0000D820 48 46 46 48 4B 4B 47 4A 47 49 4A 49 49 4B 4F 51
0x0000D830 55 53 53 4D 4A 45 4A 49 47 48 44 41 3B 37 36 30
0x0000D840 2F 2E 2F 31 32 37 37 38 38 33 33 2E 2E 2B 2A 28
0x0000D850 28 28 28 29 2B 2A 2B 2D 2B 2E 30 35 3E 41 46 47
0x0000D860 46 48 47 44 43 44 41 43 43 40 3E 3C 27 28 28 2A
0x0000D870 2B 29 2C 2C 2D 2E 2E 2F 32 33 33 34 35 36 3A 34
0x0000D880 3B 3B 3B 3B 3F 3D 40 3D 41 41 41 42 43 46 45 47
0x0000D890 4A 48 4A 49 4C 4A 4C 4E 4C 4D 4E 52 53 51 53 54
0x0000D8A0 53 55 55 59 5A 5C 5A 58 58 59 57 54 50 4F 4D 4C
0x0000D8B0 48 44 40 3D 34 33 2F 2D 2F 38 41 49 58 70 9C CE
0x0000D8C0 F9 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000D8D0 FF FF FF FF FF FF FF F7 EF EA DC D5 CF C8 CB CA
0x0000D8E0 CA C0 BE C2 BD BB C3 C4 C5 C6 C2 BF C1 B9 BC B5
0x0000D8F0 B0 AE AE AE AF B2 AF B4 AC AD A5 A3 9D 98 8C 86
0x0000D900 84 7C 78 78 75 76 71 75 75 79 76 7B 77 73 6D 6F
0x0000D910 6E 66 61 5C 5A 56 53 51 4D 4E 54 51 52 56 57 57
0x0000D920 5A 5B 5B 59 5B 59 5B 57 59 5A 58 55 51 4A 41 38
0x0000D930 32 29 26 26 25 26 25 28 29 2C 31 33 36 34 31 2E
0x0000D940 2E 2B 29 28 28 2A 2C 31 39 3E 45 48 47 44 41 3D
0x0000D950 3D 3E 42 49 4B 4F 4F 4C 4B 46 45 47 47 4A 4A 48
0x0000D960 47 46 45 44 3E 3C 3F 42 42 43 46 45 44 45 44 44
0x0000D970 45 41 3E 40 40 41 41 40 3E 42 43 41 41 41 3E 3A
0x0000D980 36 32 2F 31 2D 2E 2F 32 32 35 32 32 30 2E 2C 2D
0x0000D990 2C 2B 29 2B 2D 2C 2C 2A 2B 2B 2C 2D 2C 2C 2F 36
0x0000D9A0 3C 42 42 47 44 47 44 45 43 44 43 42 41 40 3D 3B
0x0000D9B0 27 29 29 2B 2A 2A 2B 2F 2E 31 2F 2F 31 32 33 34
0x0000D9C0 33 38 36 37 3A 3A 3A 3A 3B 3C 3C 3D 3E 42 42 43
0x0000D9D0 42 44 46 47 46 47 48 48 49 49 49 4D 4F 4E 4E 50
0x0000D9E0 52 52 51 53 52 52 55 54 59 58 5C 59 57 58 58 56
0x0000D9F0 51 4B 4A 4A 47 41 3F 3A 35 31 2E 2C 2E 35 3F 49
0x0000DA00 59 71 9A D1 FF FF FF FF FF FF FF FF FF FF FF FF
0x0000DA10 FF FF FF FF FF FF FF FF FF FF FF FF F5 EE E4 DA
0x0000DA20 D7 D1 D1 D3 CC C3 C2 C2 C2 C4 C3 C9 CB CA C8 C6
0x0000DA30 C2 B9 BA B5 B6 B3 B1 B0 B3 B1 B4 B1 AD A8 A3 9E
0x0000DA40 9C 95 88 8A 81 79 75 73 74 70 6B 6C 72 74 77 74
0x0000DA50 73 6F 6D 6A 69 62 5D 59 56 54 52 52 4E 4F 4F 51
0x0000DA60 52 53 56 54 5B 5B 58 59 5A 59 5B 5A 56 56 58 52
0x0000DA70 50 4A 43 36 32 2B 26 24 25 26 27 29 30 38 3D 42
0x0000DA80 3F 3A 32 2E 2C 2E 29 29 2A 2C 2F 2E 34 3B 3E 41
0x0000DA90 41 40 3E 39 39 3D 44 49 4D 4D 4E 4C 4B 47 42 41
0x0000DAA0 42 43 44 45 44 41 41 3F 3C 39 3A 3A 3B 3F 41 42
0x0000DAB0 42 44 40 41 41 3D 3A 3A 36 38 37 36 3A 3F 3E 41
0x0000DAC0 3E 3B 39 34 2F 2F 31 2D 2E 32 31 33 32 34 33 2E
0x0000DAD0 2D 2C 2B 2B 29 29 2D 2C 2B 2C 2D 2C 2B 2A 2C 2C
0x0000DAE0 2B 2C 31 34 3B 41 43 47 46 46 43 45 45 45 43 45
0x0000DAF0 42 43 3B 3C 27 28 27 29 2A 2B 29 2C 2D 30 2F 2F
0x0000DB00 33 31 31 35 34 36 35 36 37 3B 3A 38 3C 3D 3C 3D
0x0000DB10 3D 3F 41 42 43 44 44 45 43 47 46 48 4A 4A 4D 4C
0x0000DB20 4C 4D 50 4D 4F 4E 51 52 54 54 52 58 58 59 5A 5A
0x0000DB30 59 57 56 51 50 4D 4A 49 45 43 3F 3A 36 30 32 2C
0x0000DB40 31 34 3C 47 56 70 9B CC F7 FF FF FF FF FF FF FF
0x0000DB50 FF FF FF FF FF FF FF FF FF FF FF FF FF FF F4 FF
0x0000DB60 F2 EB E5 DE D8 D9 D8 D7 D9 CE C8 CA C8 C8 C6 C6
0x0000DB70 CC CE CF C9 C5 BE BF BD BA BA B2 B6 B0 B6 B2 AC
0x0000DB80 A9 AB A5 A0 98 90 8B 81 7C 7A 74 6F 6D 6A 66 66
0x0000DB90 6B 71 6F 71 70 6B 66 62 5F 5E 58 57 58 54 4F 50
0x0000DBA0 4F 4F 4F 4E 50 52 56 5A 58 5B 5C 5B 5C 5D 5A 5A
0x0000DBB0 57 5A 55 55 54 48 43 3A 2F 2B 27 28 26 26 29 2D
0x0000DBC0 3A 44 4F 51 4D 43 37 31 31 2F 2E 2C 2F 31 30 31
0x0000DBD0 32 39 38 3D 3D 3B 3A 38 3A 3C 43 48 4C 49 4E 4E
0x0000DBE0 4C 44 42 42 41 43 47 45 42 41 40 3F 3D 3B 3B 3D
0x0000DBF0 3F 42 42 43 47 47 43 43 41 3D 3A 35 33 35 35 35
0x0000DC00 3B 3E 3F 41 40 3D 39 34 2F 2E 2F 2C 2E 2D 2F 31
0x0000DC10 31 32 32 2F 2F 2D 2C 2A 29 2C 2D 29 2C 2C 29 2A
0x0000DC20 2A 29 2A 2A 2B 2B 2F 33 39 41 46 45 47 45 44 45
0x0000DC30 46 47 43 44 43 41 3E 3B 26 28 29 27 29 2A 2B 2B
0x0000DC40 2D 30 2E 31 30 30 32 33 33 36 36 35 35 39 39 38
0x0000DC50 39 3A 3C 3C 3E 3D 3E 3E 41 3F 41 45 43 44 46 44
0x0000DC60 48 49 49 4A 4A 4A 4A 4B 4C 4F 4C 4F 4F 52 54 59
0x0000DC70 59 58 59 59 59 56 53 51 50 49 4A 47 47 42 3C 39
0x0000DC80 32 32 30 2C 30 39 3F 49 55 6D 9D CC FA FF FF FF
0x0000DC90 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000DCA0 FF FF FF FF FC F4 EC E6 E9 E3 E3 DF DB D4 D2 D0
0x0000DCB0 CC C8 CC CF CF D0 D0 CD CB C6 C2 C0 BE BC B4 B4
0x0000DCC0 B3 B1 AE AC AC A5 A2 9B 97 91 86 7E 76 70 6C 6B
0x0000DCD0 67 65 63 64 64 69 69 6A 67 64 5C 5E 5A 58 55 55
0x0000DCE0 4E 4E 4D 50 4E 4C 4E 4E 51 53 54 55 57 58 5C 5A
0x0000DCF0 5A 57 5B 5B 5A 58 58 54 50 49 43 3C 32 29 29 26
0x0000DD00 25 27 2C 33 44 52 5B 61 58 4D 41 38 33 34 33 31
0x0000DD10 33 32 32 31 33 39 38 3A 39 37 37 34 3B 40 43 4A
0x0000DD20 4C 50 4F 4C 4B 46 43 45 43 46 46 46 44 45 44 44
0x0000DD30 40 42 43 43 46 44 47 46 46 49 46 44 42 42 3D 3C
0x0000DD40 39 38 38 39 39 3E 40 42 42 42 3E 38 35 31 31 2F
0x0000DD50 2D 2E 31 2F 30 34 34 35 35 34 33 32 2C 2B 2A 2A
0x0000DD60 26 27 26 24 24 25 25 26 27 29 2D 33 38 3F 41 44
0x0000DD70 45 47 45 46 46 43 46 46 45 44 41 3B 28 27 29 27
0x0000DD80 2A 28 29 2B 2C 2B 2C 2D 2F 2E 30 31 33 33 33 36
0x0000DD90 38 39 38 38 39 38 3A 3A 3C 3C 3C 3D 3E 3E 42 42
0x0000DDA0 41 42 44 46 44 47 46 49 4A 47 4B 4B 4B 4C 4D 4E
0x0000DDB0 50 51 50 56 57 56 59 57 56 55 51 51 50 4B 49 48
0x0000DDC0 45 43 3E 3A 33 2F 2E 2F 2D 33 3E 46 56 70 97 C5
0x0000DDD0 F3 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000DDE0 FE FF FF FF FF F7 FD F5 F4 EF EC E9 E9 E5 E4 E0
0x0000DDF0 E4 E1 D9 D4 D4 CE CC D1 D2 D5 D3 D0 CD C6 C3 BF
0x0000DE00 BF BC BA B5 B2 AF AB AC A7 A4 A1 99 97 8E 82 7F
0x0000DE10 76 6F 6D 69 62 5F 5D 5C 5F 62 62 64 5F 5B 58 59
0x0000DE20 58 52 52 4F 4E 4E 4C 4B 4E 4C 4F 50 50 51 51 54
0x0000DE30 55 57 59 59 58 5B 58 5B 59 57 56 55 4E 4B 42 3A
0x0000DE40 2F 2B 29 26 29 2B 2F 39 4B 5D 66 65 5E 52 46 3C
0x0000DE50 37 35 38 39 38 35 36 36 39 39 3B 38 37 38 35 3B
0x0000DE60 3C 41 46 4A 4D 4D 4F 4C 4A 49 46 49 49 4A 45 49
0x0000DE70 49 4A 4B 4B 4C 48 4B 4D 4E 4A 4B 4D 4E 4C 4B 49
0x0000DE80 48 48 47 48 46 43 42 43 43 44 43 44 46 46 43 3D
0x0000DE90 3E 3B 36 34 34 2E 2E 2F 32 3A 3D 44 46 4A 47 42
0x0000DEA0 3C 33 2E 29 26 23 22 20 1F 1F 21 22 22 26 2A 30
0x0000DEB0 38 3D 41 44 45 45 45 45 45 47 4A 4A 4A 49 41 3C
0x0000DEC0 27 28 27 2A 2A 29 29 2A 2B 2C 2C 2E 2F 2E 31 30
0x0000DED0 31 30 32 34 32 36 3A 36 36 37 39 3B 3C 3A 3A 3C
0x0000DEE0 3E 3E 40 3F 42 42 43 43 44 47 45 46 46 47 46 48
0x0000DEF0 4A 4A 4B 4B 4C 4E 52 55 57 59 56 56 56 55 51 52
0x0000DF00 4B 4B 48 45 44 41 3D 39 32 2E 2E 2E 2F 35 3F 47
0x0000DF10 55 6E 96 CA F2 FF FF FF FF FF FF FF FF FF FF FF
0x0000DF20 FF FF FF FF FF FF FF FF FF FF FE FF FE F4 F4 F2
0x0000DF30 ED F0 ED E9 EA E6 E0 DE D8 D6 D3 D8 D8 D7 D6 D1
0x0000DF40 D0 C8 C9 C4 C6 C1 BA B9 B3 AF AD AC A6 A3 9D 9A
0x0000DF50 92 8C 83 7D 75 6C 68 64 5F 5E 59 5B 58 5C 5D 5B
0x0000DF60 57 55 51 52 4F 52 50 4C 4B 4F 4D 4C 4C 4C 4E 4D
0x0000DF70 52 52 52 55 55 57 59 58 5B 59 59 57 5C 58 55 52
0x0000DF80 4E 4B 46 3A 32 29 29 27 2A 2D 30 3A 4E 5F 6A 69
0x0000DF90 61 58 48 3F 3A 3A 39 3A 39 38 38 37 39 3A 38 39
0x0000DFA0 38 38 38 3C 3C 42 48 49 4E 4F 4E 4D 4C 4A 4B 4D
0x0000DFB0 4F 4E 50 4F 51 4F 50 4E 4F 4F 52 54 52 51 4E 4F
0x0000DFC0 4C 4E 4E 4F 52 53 5A 5C 5F 5E 5B 53 4D 4B 4A 4C
0x0000DFD0 4D 4C 4B 49 47 46 42 3C 3A 31 2E 31 36 42 4C 59
0x0000DFE0 68 67 62 5C 50 42 34 2D 26 1F 1D 1C 1A 1C 1E 1F
0x0000DFF0 22 26 29 2E 35 3C 3E 43 42 45 44 46 46 4C 4B 4D
0x0000E000 4F 49 46 40 28 28 28 28 27 2B 29 2A 2A 2B 2D 2C
0x0000E010 2D 30 2E 2F 31 32 31 34 36 33 33 33 35 39 34 3A
0x0000E020 3A 38 39 3C 3B 3C 3D 40 3D 41 3F 43 45 43 44 44
0x0000E030 41 45 46 46 49 4A 48 4B 4B 4C 4B 51 59 54 58 58
0x0000E040 58 52 55 52 4B 48 45 47 41 40 3D 35 34 33 2E 2C
0x0000E050 2D 36 3D 48 52 6C 9A C9 F1 FF FF FF FF FF FF FF
0x0000E060 FF FF FF FF FF FF FF FF FF FF FF FE F4 F9 F6 FC
0x0000E070 F9 F4 F0 F5 EB E9 EB E5 E8 E2 DE DD DB D5 D4 D6
0x0000E080 D4 D7 D9 D5 CF CB C6 C9 C2 C0 BE BC B4 B2 AE AB
0x0000E090 A3 9F 9A 94 90 89 82 7A 72 6B 68 61 60 5A 5A 59
0x0000E0A0 54 58 58 55 54 52 50 4D 4E 4D 4D 4D 4B 4A 4B 4B
0x0000E0B0 4A 4C 4C 4E 4F 50 51 54 55 57 56 59 58 5A 58 56
0x0000E0C0 58 58 56 53 51 4B 41 39 31 2B 29 28 28 2B 2E 3A
0x0000E0D0 4B 5A 66 67 5D 54 44 3F 3A 3C 3B 3D 3A 38 34 36
0x0000E0E0 37 39 39 35 38 38 37 3B 41 44 46 4A 50 51 53 4F
0x0000E0F0 4E 4C 4B 4C 52 4F 53 51 52 4E 51 4C 4E 4E 52 51
0x0000E100 50 51 4D 4C 4D 4F 53 57 5B 64 6C 77 7C 77 74 6D
0x0000E110 5F 56 4F 52 50 51 53 50 4C 4C 4A 46 3C 39 35 35
0x0000E120 3D 48 5C 6F 7A 81 7E 72 61 4E 3A 2F 26 20 1E 1B
0x0000E130 1C 1D 1E 1F 22 24 27 2D 31 37 3E 3E 41 42 42 46
0x0000E140 4B 4D 50 55 4E 51 48 43 29 29 2A 2B 28 28 28 29
0x0000E150 29 2A 2B 2C 2D 2F 2D 2F 30 30 30 31 31 32 33 33
0x0000E160 34 34 37 39 39 38 39 38 3A 3A 3A 39 3D 3D 3F 40
0x0000E170 42 40 43 40 42 48 45 46 4A 47 4A 47 49 4A 4D 51
0x0000E180 54 54 54 57 52 57 52 4F 4D 48 48 44 43 42 3A 36
0x0000E190 33 31 2E 2B 2E 34 3C 47 53 6E 98 C8 F2 FF FF FF
0x0000E1A0 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0x0000E1B0 FF FF FB F8 FA F8 F3 F1 EF ED EE E6 E7 E4 E5 DD
0x0000E1C0 D9 D8 D6 D5 D3 D6 D7 D1 D4 CE C9 C5 C3 C1 BC B7
0x0000E1D0 B1 AF AA AB A2 9F 9D 9B 8E 8B 81 79 6F 69 69 5F
0x0000E1E0 5C 5B 56 53 56 52 54 51 4F 4C 4A 4C 4B 4B 4D 4D
0x0000E1F0 48 47 4B 4A 4B 4A 4C 4F 4F 4E 4F 53 53 55 56 59
0x0000E200 57 58 59 57 56 56 56 52 50 4A 42 3C 2F 2B 29 28
0x0000E210 29 2B 30 36 45 55 60 5E 58 4D 41 38 38 36 3A 39
0x0000E220 38 36 34 33 36 36 33 34 33 35 3A 3A 3E 42 4B 4B
0x0000E230 4F 52 50 50 4D 4D 4A 4E 52 58 58 55 54 4D 4B 47
0x0000E240 47 49 4B 51 4E 4A 48 48 4A 4E 52 59 64 6B 7D 8F
0x0000E250 92 8F 8A 7C 6C 5A 53 50 52 50 55 53 55 54 52 4A
0x0000E260 45 3F 35 39 40 4E 61 74 85 89 8B 7C 6A 53 41 30
0x0000E270 26 20 1D 1B 1B 1C 1C 20 20 24 27 2B 2E 34 3A 38
0x0000E280 3C 3E 40 44 4C 51 54 55 54 4E 49 42 2C 2A 29 2A
0x0000E290 2A 28 2A 2B 2A 2A 2C 2A 2A 2C 2E 2D 2E 2E 31 32
0x0000E2A0 31 31 34 31 33 34 36 36 39 38 36 37 38 39 3A 3B
0x0000E2B0 3B 3D 3E 3E 3F 40 40 40 42 43 43 41 46 46 48 48
0x0000E2C0 46 48 4C 4C 51 55 54 54 56 51 50 4E 4D 49 46 45
0x0000E2D0 41 3F 3A 35 31 30 2B 2C 2D 33 3E 44 53 68 93 C5
0x0000E2E0 EA FF FF FF FF FF FF FF FF FF FF FF FF FF F9 FD
0x0000E2F0 FB FF FD F3 F9 F7 F5 F2 F4 F1 F2 EA E8 E5 E4 E0
0x0000E300 E5 DF DE D5 D4 D5 D2 CF D1 CD CD CF CA CC C8 C3
0x0000E310 C1 BE B9 B5 B3 AD AA A6 A6 9E 99 95 8D 89 81 77
0x0000E320 6F 6A 64 5E 5E 58 56 53 4F 4F 50 4D 4D 4C 4B 4B
0x0000E330 4B 4E 4C 4A 4A 46 47 4C 4B 4A 4C 50 4F 51 53 53
0x0000E340 53 53 55 55 55 55 59 57 58 54 54 52 4E 4B 43 3E
0x0000E350 31 2B 27 28 2A 29 2E 36 43 4B 53 55 4E 44 3A 35
0x0000E360 33 34 34 34 30 31 30 32 34 31 33 33 37 38 36 37
0x0000E370 3E 41 44 4B 4F 4F 4F 50 4F 48 4A 4D 51 56 55 57
0x0000E380 52 4E 42 3F 40 45 47 4A 4A 47 44 44 48 4C 50 58
0x0000E390 65 71 83 97 9D 93 90 82 6F 5F 53 51 51 54 54 59
0x0000E3A0 57 57 54 4B 48 3D 3A 34 3E 4E 5D 74 80 83 7D 75
0x0000E3B0 65 52 42 30 26 21 1E 1A 1B 1B 1D 1E 21 23 27 2A
0x0000E3C0 2F 31 33 35 39 3A 3C 42 4B 4D 53 54 51 4B 48 42
0x0000E3D0 2D 29 29 2A 2B 2A 2A 2A 28 2A 2C 2B 2D 2C 2F 2C
0x0000E3E0 2D 2D 2D 2F 31 2F 32 32 32 34 34 36 35 35 36 38
0x0000E3F0 37 38 38 3A 39 3D 3C 3B 40 3C 3D 41 3E 42 41 42
0x0000E400 43 41 45 43 46 47 49 4F 51 51 54 50 54 50 4F 4B
0x0000E410 4A 47 44 42 42 3E 3B 35 32 2F 2D 2B 2D 33 3D 44
0x0000E420 54 6C 95 C2 F1 FF FF FF FF FF FF FF FF FF FF FF
0x0000E430 FF FF FF FF FF FF FD FD F6 F4 F6 F4 F4 F2 EC ED
0x0000E440 E3 E1 E7 E4 E1 DC DB D6 D1 CE CE C9 CE CC CC C9
0x0000E450 C8 CB C9 BD C3 B9 B8 B2 AF AD A7 A4 A3 9C 98 90
0x0000E460 8B 86 7E 74 6F 66 63 5F 57 56 55 50 4F 4D 4D 4D
0x0000E470 4B 49 4A 4B 4F 4D 4D 4C 4C 4A 4D 4C 4C 4C 50 4F
0x0000E480 4D 53 4E 54 52 52 54 54 55 55 57 54 55 56 55 52
0x0000E490 4D 49 45 3A 33 2C 28 27 29 2A 2B 32 3B 44 49 49
0x0000E4A0 47 3C 33 31 2D 2E 2D 2E 2F 2D 2E 2F 2E 2E 33 33
0x0000E4B0 36 36 38 39 3C 42 46 4D 4E 50 4F 52 4D 4A 4A 4C
0x0000E4C0 52 56 57 55 4F 45 42 3E 3C 3F 43 46 46 45 43 43
0x0000E4D0 48 48 50 59 5F 6B 79 86 8D 8C 86 7D 69 58 54 50
0x0000E4E0 53 58 55 58 57 59 53 4D 46 3F 34 35 3B 47 53 5D
0x0000E4F0 68 6D 6A 60 52 48 39 2F 26 21 1D 1B 1B 1D 1E 1E
0x0000E500 1F 25 27 28 2B 2C 32 32 34 39 3D 3F 47 50 50 52
0x0000E510 4D 4B 45 40 2A 2B 2A 29 2A 2C 2D 2C 2B 2C 2A 2A
0x0000E520 2B 2C 2D 2B 2D 2E 2E 2E 30 31 2D 31 31 33 36 33
0x0000E530 36 33 35 35 36 35 39 39 3A 3B 3B 3A 3C 3D 3D 3E
0x0000E540 3D 40 3F 41 43 42 43 44 44 46 48 48 4E 51 50 53
0x0000E550 51 52 4C 4D 49 46 43 45 42 3E 38 34 32 2D 2B 2C
0x0000E560 2C 31 3C 46 52 6C 98 C5 E7 FF FF FF FF FF FF FF
0x0000E570 FF FE FF FF F5 F2 F6 F7 F1 F2 E4 E6 EB EB EB EE
0x0000E580 ED EA E3 DA DD DA D9 DD DA DD DA D5 CE CA C9 C6
0x0000E590 C1 C5 C6 C3 C4 C4 BF C5 BD BA B4 B2 AC A7 A4 A6
0x0000E5A0 9E 9E 94 8E 8C 84 7D 73 6C 65 5E 5C 58 54 51 52
0x0000E5B0 4D 4E 4D 4C 4A 4A 48 4E 4A 4E 4F 4B 4A 4C 4A 4B
0x0000E5C0 4D 4D 4F 50 52 51 52 52 54 55 53 54 55 55 55 54
0x0000E5D0 55 57 52 53 4D 4B 45 3C 31 2D 28 27 25 29 28 2C
0x0000E5E0 34 3A 3E 40 3E 39 32 2E 2B 2B 2A 2A 29 2A 2A 2A
0x0000E5F0 2B 2F 30 34 34 37 3A 38 3A 3F 41 47 4D 53 53 51
0x0000E600 4F 4C 4C 4C 50 54 57 54 4B 47 41 3F 3B 3D 3D 41
0x0000E610 46 43 41 3F 47 4A 4C 53 59 5E 6A 6D 7A 74 70 68
0x0000E620 60 53 4F 51 54 57 57 58 58 52 4F 4A 44 3B 39 33
0x0000E630 37 3F 46 4C 52 53 4F 48 3E 38 2F 2B 27 21 22 1E
0x0000E640 20 1E 1F 22 23 24 26 27 29 2D 30 2E 34 38 3A 3C
0x0000E650 44 48 4B 4A 45 44 43 3E 27 28 28 29 2A 29 2A 2B
0x0000E660 2C 2B 29 2C 2B 2A 2C 2C 2D 2A 2D 2E 30 32 2E 31
0x0000E670 31 32 31 32 33 33 34 33 34 34 36 36 39 38 3A 3A
0x0000E680 3B 3C 3B 3B 3E 3E 3E 41 3F 3F 41 43 42 47 44 4B
0x0000E690 52 4C 52 50 52 4F 4E 4C 4B 46 44 41 3F 3D 39 33
0x0000E6A0 2E 2B 2B 2B 29 30 3A 41 4E 6A 99 C5 EB FF FF FF
0x0000E6B0 FF FF FF FF FF FF FC F7 F1 EE EC ED ED EB EB E3
0x0000E6C0 E5 DD E4 E8 EA E6 E0 DA D4 D0 D1 D5 D8 D6 D6 CE
0x0000E6D0 CB C6 BE BF BB BD BD BE C0 C5 BF BD BC B6 B1 B1
0x0000E6E0 AC A7 A3 A1 A3 98 92 8D 8A 83 7A 71 6A 64 5D 5F
0x0000E6F0 55 54 54 53 4D 4E 4B 4D 49 48 49 4B 4D 4C 4E 4F
0x0000E700 4C 4C 49 4B 4C 4E 4F 4D 53 4F 52 53 53 55 53 51
0x0000E710 56 55 56 54 53 54 53 51 4E 4A 44 3B 2F 2C 2A 28
0x0000E720 27 2A 2B 2D 31 34 37 38 38 33 2D 29 28 27 28 26
0x0000E730 28 29 26 2A 2B 2D 30 34 35 36 37 36 38 3B 41 49
0x0000E740 4D 51 53 54 51 53 53 4E 50 54 52 51 4D 47 3E 3C
0x0000E750 39 3C 3D 3F 3E 42 3D 42 44 46 4A 50 4F 52 57 59
0x0000E760 5A 5B 57 58 51 48 4D 4E 52 53 52 50 51 4C 48 43
0x0000E770 3F 3A 33 30 32 36 3B 3E 3F 3D 3A 38 2F 2C 29 27
0x0000E780 28 25 25 24 22 25 22 24 24 26 28 2A 2A 2D 2F 30
0x0000E790 34 34 38 3D 40 44 48 46 41 3F 40 3C 24 25 27 26
0x0000E7A0 29 27 2B 2A 2B 29 2B 2C 2C 2E 2B 2C 2D 2D 2C 2D
0x0000E7B0 2F 2F 2F 2E 31 31 31 33 34 33 32 35 33 33 38 36
0x0000E7C0 35 37 38 3A 3A 3A 3A 3C 3C 3C 3E 3B 3E 3E 41 41
0x0000E7D0 42 40 47 4C 4F 4E 4F 50 50 4F 4D 49 47 45 43 43
0x0000E7E0 40 3B 38 35 2F 2C 2A 29 2C 2F 39 43 51 6C 98 C5
0x0000E7F0 E9 FF FF FF FF FF FD F9 F4 F0 E8 EA E7 E2 DE DC
0x0000E800 E1 DE D9 D7 D6 D4 D5 D7 DE E3 DF D6 CE CB C8 CC
0x0000E810 D2 D2 D3 CA C4 BB B9 B2 B3 B6 B9 BB BE B8 BB BB
0x0000E820 B7 B8 B1 AA AB A6 A2 9C 99 98 92 89 87 7E 79 71
0x0000E830 6A 68 62 5C 59 57 56 52 51 50 4E 4C 4B 4A 4B 4E
0x0000E840 4E 4E 4F 4E 4F 4E 4A 4C 4E 4D 4F 51 51 50 52 52
0x0000E850 53 54 55 54 55 53 54 54 54 56 54 52 4E 4A 43 3B
0x0000E860 32 2A 2A 2A 2C 2E 2B 2E 31 30 32 31 33 2F 2B 27
0x0000E870 28 26 24 26 27 26 26 27 29 2B 2E 33 30 35 37 36
0x0000E880 33 38 3E 46 4E 55 54 55 55 53 51 4F 4E 4E 4D 4B
0x0000E890 46 43 41 3B 3B 3A 39 3A 40 3E 3E 3F 41 46 47 47
0x0000E8A0 48 45 47 47 49 49 45 43 44 42 44 47 4B 4D 4B 49
0x0000E8B0 48 46 40 3E 3A 38 34 31 33 32 35 36 33 31 31 2C
0x0000E8C0 2D 2B 29 27 29 28 2A 28 2A 29 28 27 28 2D 2A 2C
0x0000E8D0 2F 30 32 2E 32 32 36 39 41 42 45 43 42 3F 41 40
0x0000E8E0 22 25 23 26 26 26 28 29 2A 2A 2A 2A 2C 2E 2D 2C
0x0000E8F0 2C 2B 2B 2C 2F 2E 2E 2D 2F 31 30 33 33 32 31 31
0x0000E900 33 33 36 35 36 36 37 38 39 39 39 3A 3B 3E 3B 3C
0x0000E910 3D 40 3F 3F 42 43 46 49 4F 4F 51 51 4F 4E 4B 48
0x0000E920 4A 43 42 40 3F 3A 38 32 2E 2B 2A 28 2A 2D 36 40
0x0000E930 51 6A 93 C5 ED FF FF FF FF FF F7 F0 E6 E5 E4 E3
0x0000E940 DC DA DA DA D8 D6 DD D6 D0 CA D0 D5 D8 DB DB D4
0x0000E950 CD C7 C3 C6 CC CC CA C7 BE B8 B3 B0 AF B3 B4 B8
0x0000E960 BB B9 B4 B8 B6 B6 B3 AA A8 A9 A2 9C 9A 92 8E 8A
0x0000E970 86 7F 79 6F 6A 66 65 62 5F 5A 58 55 52 52 50 4D
0x0000E980 4D 4D 4D 4D 4F 4E 52 4F 4D 4F 4F 4D 4C 4F 4C 4F
0x0000E990 53 4F 4F 51 56 55 56 55 53 51 55 53 57 55 54 51
0x0000E9A0 4F 4D 46 3A 31 2E 2E 2C 2E 2E 32 32 34 35 35 35
0x0000E9B0 32 2E 2B 26 25 22 26 25 26 26 27 26 28 2C 2F 33
0x0000E9C0 34 32 35 35 34 35 3C 42 4F 54 5A 55 57 53 51 51
0x0000E9D0 4C 4A 46 43 42 3F 3B 37 39 34 36 39 3C 3C 3B 3C
0x0000E9E0 40 43 42 43 42 41 3E 3C 3C 3A 3A 3C 3B 3D 41 42
0x0000E9F0 47 46 43 46 41 3F 38 3B 37 33 34 32 32 32 33 30
0x0000EA00 31 2E 2A 2A 28 28 29 29 2B 2E 2D 2E 2C 2C 2B 2D
0x0000EA10 2F 2D 2F 31 30 30 30 31 32 33 38 38 3E 40 44 42
0x0000EA20 42 41 41 3D 23 23 24 24 27 24 26 29 2A 28 2A 29
0x0000EA30 2A 2B 2B 2B 2C 2D 2C 2D 2E 2C 2E 2F 30 2E 31 2F
0x0000EA40 2E 33 30 32 34 32 33 34 33 38 34 37 38 37 39 3A
0x0000EA50 3A 3A 3A 3A 3C 3D 3D 3D 3F 40 43 48 4F 51 4F 4E
0x0000EA60 4F 4B 48 46 46 43 42 40 3F 3B 36 32 2E 2A 2A 29
0x0000EA70 2A 2F 33 3F 4E 6A 96 C4 EA FF FF FF FE F9 EE E4
0x0000EA80 DE D7 D5 D3 D4 CE D4 D7 D4 D4 D8 CF CE C8 C9 CD
0x0000EA90 D0 D7 DB D6 CD CA C9 C5 C6 CC C9 C5 BC AF AF AE
0x0000EAA0 AF AE B4 B8 B5 B2 B5 B5 B6 AF B2 A4 A4 A2 A0 99
0x0000EAB0 99 92 8E 8B 84 7F 7A 72 6E 6B 69 67 65 61 5C 59
0x0000EAC0 56 56 50 54 4D 4C 4D 4F 4D 53 50 4F 4E 4F 4E 4E
0x0000EAD0 4E 51 4D 4E 4F 50 51 52 54 56 53 55 54 54 53 57
0x0000EAE0 57 54 55 53 52 4A 45 3C 33 2F 2B 2E 31 33 34 3A
0x0000EAF0 3B 3E 42 42 3C 38 2E 2A 26 25 27 26 25 26 24 26
0x0000EB00 26 28 2D 2E 32 34 33 31 31 34 3C 46 4E 53 58 57
0x0000EB10 59 58 54 54 4F 46 42 42 3D 3B 39 33 35 35 34 34
0x0000EB20 35 3A 3A 3B 3F 42 3F 40 3F 3E 3C 3B 38 39 36 3A
0x0000EB30 3B 3C 3F 42 47 44 45 41 3D 3E 3C 3B 3B 38 34 34
0x0000EB40 33 2F 31 2F 2D 2B 28 27 28 29 28 2B 2D 2D 2D 2D
0x0000EB50 2C 2D 2E 30 30 32 34 33 33 34 32 2F 2F 34 35 3A
0x0000EB60 3D 44 43 42 40 3E 3F 3F 22 22 23 23 23 25 27 27
0x0000EB70 27 28 28 28 29 2B 2A 2B 2C 2C 2D 2C 2D 2E 2D 2D
0x0000EB80 2F 2F 2F 30 2E 30 30 31 2F 32 32 32 34 36 33 35
0x0000EB90 36 36 35 36 38 39 39 39 3C 3B 39 3D 3C 3F 44 48
0x0000EBA0 4C 4B 50 4E 4D 4A 4B 48 46 44 40 3F 3F 3A 35 31
0x0000EBB0 2C 2B 2A 2C 2B 31 38 42 4E 69 90 C2 ED FF FF FF
0x0000EBC0 FF F9 E8 DA D4 D1 CC C9 CA CC CE D2 D5 D6 D6 D0
0x0000EBD0 CA C4 C8 C9 CF DC DA D7 D1 CE C7 C6 C3 CA C4 C4
0x0000EBE0 BA B2 AE AD B0 B2 B4 B8 B1 B2 B6 B4 B0 AE A9 A8
0x0000EBF0 A0 9F 9A 9B 97 8F 8A 87 84 7E 79 71 74 6E 6C 6D
0x0000EC00 65 62 60 5E 56 59 54 55 51 52 4F 4D 4D 50 4F 4E
0x0000EC10 53 4D 4F 51 50 4E 4E 4F 51 50 4F 4E 55 54 56 53
0x0000EC20 56 52 56 57 57 58 54 53 4F 4C 44 3E 32 2E 2B 2F
0x0000EC30 31 35 39 3E 46 50 54 4F 4B 40 37 2F 2B 29 29 2A
0x0000EC40 26 23 23 23 24 26 2A 2E 2F 33 31 31 31 36 3C 45
0x0000EC50 4C 56 59 5F 5C 5A 55 52 4E 47 44 42 3C 3A 3A 37
0x0000EC60 33 31 32 33 34 38 39 3A 3E 42 3F 40 3E 3F 3F 3C
0x0000EC70 3A 3A 3A 3D 3B 3C 42 40 45 43 45 43 3F 40 3D 3C
0x0000EC80 39 38 34 2F 31 30 2D 2A 2B 29 27 26 26 28 26 26
0x0000EC90 28 29 29 2A 28 2A 29 2E 2F 2F 33 31 31 31 31 30
0x0000ECA0 2F 33 33 38 3D 41 43 40 3B 3B 3E 3D 20 21 23 23
0x0000ECB0 24 23 24 27 26 25 28 28 28 28 2A 29 2B 2A 2D 2D
0x0000ECC0 2E 2C 2F 2B 2E 2F 30 31 2E 2F 30 32 2E 30 30 32
0x0000ECD0 34 35 34 34 36 33 37 37 36 38 39 39 3B 3A 3B 3A
0x0000ECE0 3B 3E 3E 46 4B 4C 4D 4C 4C 49 48 45 45 40 42 40
0x0000ECF0 3D 39 34 2F 2C 2A 2B 2D 34 39 3D 43 4E 6A 93 C3
0x0000ED00 E5 FF FF FF FF EC E5 D6 CC C6 C9 C9 CD CE D0 D2
0x0000ED10 D7 D7 D8 D4 C9 BF C1 C6 C9 D2 D6 D9 D2 CD CB C3
0x0000ED20 C2 C8 C1 BF B7 B2 AD AF B3 AE B1 B1 AD AA AF AF
0x0000ED30 B1 AB A9 A2 A1 99 97 8F 91 8D 89 85 82 7E 79 73
0x0000ED40 6C 6D 6D 6A 69 66 64 5E 5D 58 56 54 54 52 52 50
0x0000ED50 50 4F 4F 4D 51 51 4F 4E 51 4C 4E 4E 4F 4F 50 51
0x0000ED60 56 50 53 53 51 51 55 53 55 56 54 51 4F 4A 45 3D
0x0000ED70 33 2D 2A 2B 2F 37 3A 41 4A 56 5D 5D 57 4B 43 39
0x0000ED80 2F 2D 2F 2F 2A 28 25 23 23 26 2A 2B 30 33 33 32
0x0000ED90 31 38 40 46 4E 56 5C 5E 60 5D 57 54 50 4A 49 42
0x0000EDA0 40 3B 39 39 36 35 32 33 33 38 39 3A 3E 3F 41 3D
0x0000EDB0 3F 3E 3D 3E 3E 3C 3C 3F 3E 41 40 44 47 47 44 42
0x0000EDC0 40 42 3E 3D 39 36 31 2E 2B 29 27 28 25 25 24 21
0x0000EDD0 20 21 22 22 20 22 22 23 22 22 23 26 28 2A 2C 2E
0x0000EDE0 2E 2E 2E 2E 30 30 33 3A 3A 3E 3E 3A 38 39 38 3C
0x0000EDF0 21 21 20 21 22 23 25 24 25 26 26 27 26 28 28 28
0x0000EE00 29 2A 2A 2E 2B 2C 2C 2E 2E 2C 2F 2F 2E 2D 2F 31
0x0000EE10 2E 32 32 33 33 31 32 35 33 35 38 35 36 38 38 38
0x0000EE20 39 3A 39 3D 39 3E 40 47 49 4E 4C 4B 4B 4A 46 44
0x0000EE30 43 3E 3C 3C 3A 39 32 2E 2A 28 2A 2D 34 3D 3E 45
0x0000EE40 4E 6B 98 C6 EA FF FF FF FF F3 E0 D6 CE CA C7 C8
0x0000EE50 CE CF CF D3 D8 D9 D5 D3 CC C6 C5 C5 D0 D3 DC DB
0x0000EE60 D6 CD C9 C8 C5 C6 C4 C2 BB B3 AF B1 B2 B3 B0 AA
0x0000EE70 AE A8 A9 AC AD AE A6 A2 9A 98 91 90 8B 8E 88 87
0x0000EE80 83 7C 78 71 70 6B 6A 68 66 63 60 5B 5A 55 56 54
0x0000EE90 51 51 52 51 4F 4B 4D 4E 4C 4F 4C 4D 4F 4D 50 4B
0x0000EEA0 4E 4F 51 50 4F 52 52 4E 53 51 52 56 56 54 51 51
0x0000EEB0 4D 4A 43 3B 34 2E 2B 2A 30 35 3A 3F 4D 59 61 62
0x0000EEC0 5C 55 48 3E 35 36 35 32 2F 2A 27 22 22 23 28 2F
0x0000EED0 30 33 34 33 37 39 41 48 4D 55 5D 5D 60 5B 58 57
0x0000EEE0 55 4E 4B 46 43 41 3E 3A 3B 38 36 36 33 35 38 37
0x0000EEF0 39 3F 41 3C 3D 3C 3D 3E 3E 3B 3E 3E 3E 41 3F 3F
0x0000EF00 41 42 40 40 3E 3E 38 35 33 31 2D 26 22 21 20 1E
0x0000EF10 1E 1E 1C 1B 1B 1A 1B 1D 1C 1B 1C 1A 1B 1A 1D 1F
0x0000EF20 21 24 25 28 2A 29 2B 2C 2E 2E 33 35 39 3C 3C 38
0x0000EF30 3A 36 36 38 1F 1F 22 20 22 22 23 24 25 26 24 26
0x0000EF40 27 26 28 27 27 2A 2A 2A 2B 2A 2C 2D 2C 2D 2D 2D
0x0000EF50 2D 2E 30 2E 2F 2F 2F 31 32 30 31 33 33 32 34 35
0x0000EF60 36 38 35 36 39 36 3A 36 39 3A 3F 44 4B 4C 4B 4A
0x0000EF70 4C 48 48 42 40 3D 3D 3A 38 35 31 2D 28 26 28 2E
0x0000EF80 38 3D 40 43 4E 67 92 C1 E9 FD FF FF F5 ED E3 D7
0x0000EF90 CB C9 C9 CA C5 CB CF D3 D2 D5 D5 D3 CA C4 C3 C6
0x0000EFA0 CB D1 D3 D7 D3 CB C7 C8 C2 C4 C0 C4 B9 B3 AD B1
0x0000EFB0 AF AC AB AC A9 A5 A6 AA A8 A2 A3 A2 99 93 93 91
0x0000EFC0 8F 8A 8A 84 7E 7C 75 6D 6B 68 66 63 63 61 59 59
0x0000EFD0 54 55 51 51 4F 4E 4E 4E 4E 4C 4C 4C 4C 4F 4E 4C
0x0000EFE0 4F 4E 4F 50 51 4F 4E 4E 52 50 51 4F 4E 54 53 54
0x0000EFF0 53 54 53 50 4D 4C 44 3E 33 2D 2C 2C 2F 32 3A 3F
0x0000F000 4A 5A 63 68 66 5B 4E 42 3F 3E 3D 3A 35 2E 2A 23
0x0000F010 23 23 2B 2E 33 36 3A 37 39 3D 42 48 51 55 5A 5B
0x0000F020 5B 5E 5A 58 56 51 4E 4B 46 44 3E 3F 3C 3E 3B 3A
0x0000F030 38 38 36 39 3A 3B 3C 3B 3B 3C 3C 3E 3D 3B 3B 3B
0x0000F040 3B 3A 39 39 3B 39 3B 38 37 36 33 30 2E 2B 24 1E
0x0000F050 1B 1A 1A 19 16 16 16 15 15 17 17 18 17 17 16 15
0x0000F060 14 16 16 1B 1C 1E 22 24 26 29 2A 2C 2C 30 30 35
0x0000F070 3A 39 3B 37 36 38 36 39 20 20 20 21 23 23 23 22
0x0000F080 24 25 23 24 26 27 27 28 27 27 2A 28 28 28 2B 2C
0x0000F090 2C 2C 2C 2D 2A 2D 2D 2F 2E 30 2F 30 31 30 30 32
0x0000F0A0 33 32 34 34 34 33 36 35 35 35 36 36 36 39 3C 43
0x0000F0B0 46 48 4A 4A 48 46 47 45 3D 3C 3B 38 37 34 2D 2B
0x0000F0C0 26 25 26 2B 35 3C 3E 40 4E 69 93 C1 E8 FF FF FF
0x0000F0D0 FB EF DF D7 CE CF CB CD C8 C9 CE CF CF D0 D0 CF
0x0000F0E0 C7 C2 C4 C7 CB D5 D4 D2 D1 CA C4 C1 C8 C3 C2 C1
0x0000F0F0 B3 AF AC AE AE B0 A7 A5 A7 A2 A5 A6 A7 A5 9C 9D
0x0000F100 97 91 8F 8E 91 8C 87 85 80 7B 73 71 6A 66 61 5F
0x0000F110 5F 5B 56 54 53 4E 4A 4A 50 50 51 4E 51 4D 4D 4E
0x0000F120 4E 4C 4C 4C 4D 4C 4E 4F 4D 50 4D 4E 4F 51 4F 51
0x0000F130 50 4F 52 53 53 54 52 50 4E 4A 44 3C 34 2E 2B 2A
0x0000F140 2B 2D 35 3C 48 57 64 69 69 60 53 46 43 41 40 3E
0x0000F150 39 2E 29 22 22 24 2A 31 34 38 38 3B 3A 3C 43 49
0x0000F160 4E 58 59 5B 59 5E 5A 5B 58 55 50 4C 4A 48 44 43
0x0000F170 42 40 40 3C 3C 3A 37 39 38 39 3A 39 3A 3B 3A 36
0x0000F180 3B 38 36 3A 36 38 35 38 36 33 32 32 32 33 32 2F
0x0000F190 2C 24 20 1B 19 17 15 15 14 13 13 13 12 13 13 13
0x0000F1A0 13 13 13 12 12 14 14 16 18 1A 1D 1F 24 26 27 28
0x0000F1B0 2B 2B 2E 34 36 39 39 36 36 35 34 36 1F 1E 1F 22
0x0000F1C0 20 21 23 21 23 21 24 23 24 27 25 25 27 29 28 28
0x0000F1D0 28 29 29 2A 2A 2C 2B 2C 2B 2C 2D 2C 2D 2E 2F 2F
0x0000F1E0 2E 31 2F 31 32 32 34 32 32 34 35 34 34 35 34 36
0x0000F1F0 37 36 3D 44 44 4A 4B 49 48 45 46 42 40 3B 39 38
0x0000F200 37 35 2E 2A 26 25 24 29 34 3D 3E 43 4B 6C 9A C3
0x0000F210 E4 FA FF FF EF E6 D8 CA C9 C7 C8 CA C3 C6 CF CE
0x0000F220 CB CD CB C7 C8 BA C5 C4 C6 CC CE C7 C8 C2 C3 C4
0x0000F230 C3 C1 BD B6 B6 B0 A8 AD AD AA A8 A6 A2 A3 A3 A6
0x0000F240 A2 A4 9C 9C 9A 97 8F 8F 91 8C 8A 87 80 79 74 6D
0x0000F250 69 62 61 5E 5B 57 56 52 4D 4C 4A 49 49 4B 4C 4C
0x0000F260 4E 4D 4C 4A 4B 4C 4A 4C 49 4B 4B 4D 52 4F 51 50
0x0000F270 4E 52 4F 52 52 52 53 52 54 54 53 52 4F 4B 43 3A
0x0000F280 34 2D 2B 28 2A 2C 31 36 43 51 5E 68 67 60 54 49
0x0000F290 42 41 41 3E 36 31 29 23 20 23 27 2F 36 39 3A 3B
0x0000F2A0 3B 3F 42 49 4F 52 58 59 5D 5A 5B 58 59 56 55 50
0x0000F2B0 4D 4A 48 47 44 46 46 44 3E 3B 3A 38 38 39 36 38
0x0000F2C0 39 38 36 36 3A 35 3A 38 36 34 33 34 32 30 32 32
0x0000F2D0 34 36 33 31 2B 24 1F 19 17 14 14 12 12 12 10 12
0x0000F2E0 12 12 11 12 12 12 12 12 11 11 13 14 17 19 1B 1F
0x0000F2F0 21 24 26 26 29 2B 2F 2F 38 39 3A 36 35 36 37 38
0x0000F300 1E 1E 20 21 20 22 20 22 23 22 23 24 23 24 26 26
0x0000F310 25 28 28 28 28 29 27 2B 2A 2B 2A 2B 2B 2C 2C 2D
0x0000F320 2C 2C 2D 2D 2F 2C 30 30 30 31 32 33 33 35 31 32
0x0000F330 37 35 32 35 36 35 3A 40 47 4A 49 4A 47 47 45 44
0x0000F340 43 3F 3C 3A 36 32 2E 29 25 26 26 2C 32 3C 41 42
0x0000F350 4E 6B 95 C3 EB FF FF FF F8 E8 DD CE CA C2 C8 C4
0x0000F360 C7 C5 CA CF CB CA C5 C9 C5 C2 C1 C6 C9 CB C9 C5
0x0000F370 C4 C2 C3 C5 C3 BE BC B9 B3 B2 AC B1 AC AB AB A9
0x0000F380 A7 A4 A5 9F A4 9E A1 98 94 92 90 8C 8D 88 8A 84
0x0000F390 7E 79 72 6B 67 61 5F 59 58 57 53 4F 4C 49 47 4A
0x0000F3A0 48 4C 4B 4A 4C 49 4B 49 4C 45 4A 49 4A 4A 4C 4D
0x0000F3B0 50 4E 4E 50 51 50 52 53 51 52 53 50 53 51 50 4E
0x0000F3C0 4C 4A 46 3C 35 2F 2A 29 29 2B 2C 34 3C 49 56 5D
0x0000F3D0 5D 5B 52 49 44 40 40 3E 3A 30 27 22 22 22 28 2F
0x0000F3E0 33 36 3A 3B 3A 3D 40 44 4A 56 57 59 5B 5D 5B 59
0x0000F3F0 59 5A 54 52 4C 4B 47 46 46 48 4B 46 45 3E 39 38
0x0000F400 34 35 38 33 35 38 35 38 36 37 38 34 38 35 34 33
0x0000F410 33 30 31 32 35 35 36 35 2E 27 1F 1A 17 14 15 13
0x0000F420 12 12 12 12 12 12 13 12 12 11 11 10 12 12 12 13
0x0000F430 16 17 1A 1B 21 24 26 27 2A 29 2B 31 35 3C 38 3A
0x0000F440 34 3A 36 39 1E 1E 1F 1F 20 23 22 20 22 23 23 22
0x0000F450 23 24 24 24 25 27 26 27 28 27 27 29 29 29 2A 2B
0x0000F460 2B 2B 2C 2C 2B 2E 2D 2D 2E 2D 2F 2F 2F 2E 32 31
0x0000F470 31 34 35 33 32 33 34 32 35 38 38 41 46 48 49 4A
0x0000F480 47 49 47 48 49 48 47 3D 36 32 2D 2C 28 24 27 2E
0x0000F490 36 3F 42 46 51 6A 97 C5 E6 F8 F7 F9 EE E2 D4 D2
0x0000F4A0 CB C5 C6 C2 C1 C2 C6 C9 C6 C4 C8 C5 C2 C3 C3 C2
0x0000F4B0 C8 C7 C4 C5 C1 C1 C2 BC BD BC B3 B2 B2 B1 AC AB
0x0000F4C0 AB AA AC A5 A4 A4 9E 9F 9E 9C 99 97 91 8E 8E 8C
0x0000F4D0 88 85 82 82 79 74 72 6A 65 5E 5B 58 57 54 51 50
0x0000F4E0 4E 4B 47 47 48 47 49 49 48 48 44 47 46 46 46 47
0x0000F4F0 49 4B 4C 4C 4B 50 50 4F 50 4F 4F 50 50 50 4B 50
0x0000F500 4F 4E 4D 4A 4A 48 42 3C 34 2E 2B 2A 29 2A 2C 2E
0x0000F510 38 41 4C 54 57 56 4E 47 41 3E 3C 38 33 2B 27 24
0x0000F520 22 21 29 2C 30 35 39 36 34 3A 3E 44 4B 4C 54 5A
0x0000F530 5A 5E 5A 5B 58 57 52 4F 47 4A 45 48 46 47 45 48
0x0000F540 45 42 3D 39 34 35 37 33 34 38 38 36 36 36 36 34
0x0000F550 33 32 2F 30 2F 2D 2D 2F 32 32 32 32 2E 27 1F 19
0x0000F560 16 13 13 13 13 13 12 13 12 13 13 13 12 12 12 12
0x0000F570 12 12 13 13 15 16 19 1C 1E 23 26 26 29 28 2C 2D
0x0000F580 33 37 3A 3A 35 38 34 37 1D 1D 1E 20 1F 1F 21 22
0x0000F590 22 23 23 22 23 25 22 22 24 24 24 26 27 27 27 27
0x0000F5A0 28 27 27 29 2B 28 29 2A 29 2D 2C 2E 2C 2D 2D 2E
0x0000F5B0 2F 2E 31 31 2E 32 30 30 32 32 33 32 36 35 39 41
0x0000F5C0 44 48 47 48 48 49 42 47 4E 54 4B 43 3A 32 2F 2C
0x0000F5D0 2A 29 2D 33 3B 44 45 47 4F 6B 93 BD E1 FA FF FA
0x0000F5E0 F2 EA DB CE CA C8 C6 C5 C3 C2 C3 C5 C4 C2 C3 C0
0x0000F5F0 C4 C3 C2 C2 C2 C2 C1 BB BF BC B8 BE B7 B3 B3 B1
0x0000F600 AF AB A9 AC A7 A3 A9 9F 9F 9A 9D 98 97 91 91 8A
0x0000F610 89 87 87 85 83 7C 7F 79 71 6E 69 66 5E 5B 57 55
0x0000F620 54 4F 4D 4A 4A 48 43 47 45 46 45 46 44 44 41 41
0x0000F630 43 3E 42 40 43 44 46 48 48 48 49 49 48 4A 49 4A
0x0000F640 4C 49 49 4B 46 47 47 45 43 44 3E 38 32 2E 2C 2A
0x0000F650 2C 2B 2B 2F 34 3B 44 4C 52 50 49 44 3E 3B 36 31
0x0000F660 30 2B 28 22 23 24 29 2D 30 32 35 32 33 34 3B 3C
0x0000F670 42 45 4C 51 55 56 56 57 54 53 4E 4B 45 43 42 41
0x0000F680 42 43 46 45 42 41 3B 38 32 32 32 32 33 34 35 36
0x0000F690 39 36 34 35 35 33 30 31 2C 2C 2D 2C 2C 2F 2F 2F
0x0000F6A0 2A 23 1D 17 15 12 13 14 11 12 13 12 12 13 13 12
0x0000F6B0 11 11 11 12 11 12 13 13 14 15 19 1A 20 22 23 26
0x0000F6C0 27 29 2A 2E 31 34 37 36 33 38 38 37 1C 1E 1E 1D
0x0000F6D0 1F 1F 20 21 1F 22 20 22 1E 22 22 22 23 23 23 27
0x0000F6E0 24 26 26 28 26 28 27 28 27 29 29 2A 2D 2B 2A 2D
0x0000F6F0 2D 2C 2A 2F 2C 2F 2F 2E 2F 30 2E 30 31 30 31 33
0x0000F700 32 34 39 3F 43 46 49 47 48 45 44 45 4A 52 4F 44
0x0000F710 3B 33 32 34 31 2F 33 38 3E 45 44 46 4D 69 89 B2
0x0000F720 CF E7 E9 EB E4 D5 D0 C7 C3 C6 C0 C1 BB BE BE BD
0x0000F730 BE BC B8 BC B5 B9 B8 B9 B5 B4 B5 B4 AF AC AC AA
0x0000F740 A8 A9 A3 A3 A2 9A 9F 9E 9B 9E 97 91 92 8C 87 8B
0x0000F750 86 81 82 81 7A 7A 79 77 73 73 6E 6D 64 65 5E 5B
0x0000F760 55 51 50 4E 4C 4C 48 4A 44 44 43 41 40 41 3E 3D
0x0000F770 3D 3C 3D 3C 3C 3D 3B 3C 3E 3E 3F 41 40 41 40 41
0x0000F780 43 42 44 45 43 40 42 43 41 41 40 3E 3F 3D 38 36
0x0000F790 2E 2C 2B 29 2B 2B 2B 2D 2F 35 3D 44 46 4C 46 43
0x0000F7A0 3D 38 36 2E 2A 29 27 23 23 27 29 2F 2E 31 32 32
0x0000F7B0 32 30 33 39 3C 43 47 4A 4F 52 4F 4F 4D 49 47 42
0x0000F7C0 3E 3C 3B 3B 3F 3F 3F 41 3D 3C 39 33 2F 2D 2D 31
0x0000F7D0 32 33 35 39 3A 3A 38 37 36 35 34 32 2F 2D 28 2B
0x0000F7E0 2E 30 30 2D 2A 23 1F 19 15 14 14 13 13 13 14 13
0x0000F7F0 15 13 13 13 12 12 12 0F 11 11 13 13 14 16 16 1A
0x0000F800 1F 21 23 22 23 26 28 2A 30 34 35 39 38 38 37 37
0x0000F810 1E 1E 1E 1F 20 1D 1F 1F 20 20 22 20 21 21 23 21
0x0000F820 23 24 23 25 23 26 27 25 27 26 28 28 29 27 2A 2A
0x0000F830 2A 2A 29 2C 2B 2C 2C 2C 2E 2F 2E 2D 2D 2E 2F 32
0x0000F840 31 2E 31 31 31 33 37 3D 43 44 4A 49 49 49 46 44
0x0000F850 46 48 45 41 3B 37 35 35 36 35 35 39 40 41 43 45
0x0000F860 4B 62 81 9B B7 C9 CE CD CB C3 BC B9 B4 B4 B1 AF
0x0000F870 B1 AD AA A7 A7 AA A5 A4 A3 A4 A2 9F A4 A1 A0 9B
0x0000F880 9C 97 9A 90 8F 8B 8B 89 8A 86 88 84 86 82 80 7E
0x0000F890 7C 7A 76 74 73 6E 6E 6E 6B 6A 67 67 66 60 60 5C
0x0000F8A0 59 56 53 4F 4C 4A 47 44 42 41 41 40 3E 3C 3C 3A
0x0000F8B0 3A 3A 37 35 36 37 34 34 34 34 35 35 36 37 3A 38
0x0000F8C0 3A 3B 3B 3C 3C 3A 3B 3B 3B 38 3A 3A 39 38 36 34
0x0000F8D0 36 34 35 30 2E 2C 2B 2C 2B 2C 2B 2D 31 32 3B 41
0x0000F8E0 46 48 47 43 3A 38 30 2E 28 27 27 24 26 27 2B 2D
0x0000F8F0 2F 30 32 31 2E 2E 2F 32 36 3C 42 4A 4D 4E 4D 49
0x0000F900 45 42 3B 3B 39 33 36 35 35 36 38 3B 3A 38 33 2F
0x0000F910 2D 2B 2C 2F 30 34 34 36 3B 39 39 3A 3B 38 38 34
0x0000F920 31 2F 2E 30 32 31 33 35 2E 28 20 1A 16 14 13 13
0x0000F930 13 12 13 13 14 14 12 13 13 12 12 11 10 11 11 13
0x0000F940 14 14 19 1A 1C 1F 1F 22 23 24 24 27 2A 2F 34 36
0x0000F950 36 39 38 3B 1D 1D 1D 1F 1E 20 1F 1F 21 21 20 21
0x0000F960 22 1F 23 22 22 23 23 23 23 23 27 25 26 26 26 27
0x0000F970 27 27 28 2A 29 28 29 2A 29 29 2C 2C 2D 2C 2E 2C
0x0000F980 2C 2F 2D 2F 2D 2E 30 30 2D 32 36 3F 44 46 47 46
0x0000F990 47 46 43 42 46 40 40 3C 3C 3C 3B 3A 3B 39 3C 3C
0x0000F9A0 42 40 41 44 49 59 6B 85 94 9D A6 A3 A1 9F 9C 9A
0x0000F9B0 98 98 90 8F 8D 8B 8B 89 8A 89 86 82 85 84 85 82
0x0000F9C0 7F 7F 82 7D 7B 7A 77 75 74 72 72 71 6C 6D 6B 6F
0x0000F9D0 6B 69 6B 66 64 5F 61 5E 5C 5E 58 58 55 56 53 50
0x0000F9E0 51 4D 4F 4C 48 47 45 41 3E 3F 3D 3C 3C 38 36 34
0x0000F9F0 33 32 34 32 31 31 2F 31 30 2E 2C 2D 2E 2E 2E 30
0x0000FA00 2F 31 33 32 33 30 32 31 33 32 34 32 31 31 32 31
0x0000FA10 31 32 30 2E 2E 2C 2F 2E 2A 2A 2C 2C 2E 2E 2D 2F
0x0000FA20 2F 33 3C 43 4E 4E 4C 46 3A 34 2E 29 26 26 26 26
0x0000FA30 24 29 2B 2D 2D 2F 2F 30 30 2F 2C 30 34 3B 42 4E
0x0000FA40 54 58 4F 4B 41 3B 34 32 2E 31 2F 2E 2F 34 33 34
0x0000FA50 34 35 2F 2E 2B 2B 29 2A 2C 30 30 34 37 39 36 3A
0x0000FA60 3A 3C 35 35 32 2C 2D 2F 2F 32 33 34 2F 28 20 1A
0x0000FA70 15 14 13 13 13 14 13 14 13 14 15 13 13 12 12 12
0x0000FA80 12 11 12 13 11 14 17 19 1B 1D 1F 1F 1F 21 23 24
0x0000FA90 28 2B 2D 2D 31 32 33 35 1D 1D 1C 1E 1E 1D 1D 1E
0x0000FAA0 1D 20 1F 1E 21 20 1F 21 21 22 21 23 22 22 23 24
0x0000FAB0 23 24 27 26 25 26 28 28 2A 29 2A 29 29 29 2C 2B
0x0000FAC0 29 2B 2B 2C 2C 2D 2C 2D 2D 2D 2E 2F 2D 32 35 3C
0x0000FAD0 41 46 46 47 46 46 45 43 41 43 42 40 41 3F 3C 3B
0x0000FAE0 3E 3C 3D 3E 3E 3F 42 43 48 4E 5B 6A 71 78 79 79
0x0000FAF0 76 73 73 70 6F 6D 6E 6E 6A 6C 6D 6B 6C 67 66 6A
0x0000FB00 67 65 66 68 65 65 62 62 5E 5E 5E 5B 59 5A 57 58
0x0000FB10 56 57 56 54 52 53 55 50 4F 4E 50 4B 48 4A 46 45
0x0000FB20 45 45 42 44 43 3F 41 3D 3C 3A 38 3A 36 33 31 2F
0x0000FB30 32 2F 2E 2D 2D 2B 2C 2C 29 2B 29 28 29 29 29 2C
0x0000FB40 2A 28 2A 2A 2B 2B 2C 2C 2E 2D 2D 2E 2D 2D 2D 2E
0x0000FB50 2D 2F 2E 2D 2D 2C 2C 2B 2C 2B 2A 2C 2C 2E 2D 30
0x0000FB60 2F 30 32 30 31 39 44 56 5E 5F 58 4B 40 33 2D 29
0x0000FB70 25 24 23 24 27 27 28 2B 2C 31 32 33 31 2F 30 32
0x0000FB80 35 3F 4E 5A 60 61 59 50 44 39 32 30 2F 2C 2F 2F
0x0000FB90 2E 2E 31 33 30 2F 2F 2C 2C 2A 2A 2B 2D 2E 32 32
0x0000FBA0 34 34 38 37 38 36 34 34 2F 2E 2A 2B 2D 2D 2F 2C
0x0000FBB0 29 24 1D 19 15 15 12 13 14 12 12 14 14 13 14 12
0x0000FBC0 13 12 13 12 12 11 12 12 14 15 19 19 1B 1D 1E 1F
0x0000FBD0 1F 1E 22 23 27 25 28 2B 2D 2F 31 33 1C 1C 1C 1B
0x0000FBE0 1E 1C 1E 1E 1E 1F 1F 20 1E 20 21 22 22 22 22 22
0x0000FBF0 22 22 23 23 23 23 25 24 26 26 26 27 27 29 29 28
0x0000FC00 2B 2A 29 28 29 2C 2A 2C 2D 2B 2C 2D 2E 2E 2F 2E
0x0000FC10 2E 31 36 3E 40 46 4B 4B 4A 48 44 46 44 43 44 42
0x0000FC20 40 3E 3E 40 3E 40 41 43 43 43 42 43 47 48 4E 53
0x0000FC30 57 5A 60 5B 5B 58 58 54 54 52 51 52 52 52 52 4E
0x0000FC40 52 4F 4B 4D 4E 4D 4C 4C 4A 4C 4B 4A 48 48 4A 44
0x0000FC50 46 45 45 43 44 44 45 41 42 43 42 3F 41 3E 3D 3D
0x0000FC60 3B 3C 39 3B 38 39 38 38 36 38 36 33 32 32 2F 2F
0x0000FC70 2D 2D 2B 2B 2A 2A 28 29 29 27 27 27 27 27 26 25
0x0000FC80 26 27 27 24 26 28 27 27 28 29 2B 2A 2B 2C 2B 2B
0x0000FC90 2B 2A 2B 2B 2C 2A 2D 2C 2B 2C 2C 2C 2B 2B 2B 2D
0x0000FCA0 2E 2F 30 31 32 31 33 31 38 42 53 67 72 6F 63 5A
0x0000FCB0 45 36 2E 29 27 26 25 25 26 27 29 2A 2D 31 31 35
0x0000FCC0 32 35 33 38 39 46 57 64 6C 6A 67 58 4B 3C 36 31
0x0000FCD0 30 30 30 31 32 30 31 33 31 31 2E 2C 2C 2B 29 2A
0x0000FCE0 2D 2D 2E 32 33 33 33 38 36 3A 38 32 30 2B 2A 2A
0x0000FCF0 2B 2D 2D 2B 2A 21 1C 17 16 13 13 13 13 13 14 13
0x0000FD00 13 15 15 12 12 13 12 13 14 14 12 11 13 16 18 1A
0x0000FD10 1C 1D 1C 1F 1F 20 22 22 21 23 25 26 29 27 2D 2F
0x0000FD20 1D 1C 1E 1C 1C 1E 1D 1F 1F 1F 1F 1F 20 20 20 20
0x0000FD30 20 23 22 20 22 22 24 22 23 23 24 25 24 26 26 25
0x0000FD40 26 24 27 27 28 29 28 2A 2B 2B 2A 2A 2C 2C 2B 2B
0x0000FD50 2D 2D 2C 2E 2E 2F 34 3B 40 46 4C 4D 4D 4B 45 43
0x0000FD60 43 43 43 43 43 41 42 42 44 41 41 43 43 41 42 43
0x0000FD70 43 44 46 49 49 49 4B 4B 4A 46 40 3E 41 3E 3E 3F
0x0000FD80 40 3E 3C 3F 3E 3E 3E 3F 3C 3B 3E 3C 3D 3D 3C 3C
0x0000FD90 3C 39 3B 39 39 3B 3A 38 39 3B 38 36 38 37 38 38
0x0000FDA0 36 36 38 35 33 35 32 32 33 32 33 32 32 31 30 31
0x0000FDB0 2F 2E 2F 2E 2B 28 27 27 28 26 28 27 28 26 26 26
0x0000FDC0 26 27 28 27 26 26 27 27 27 2B 28 2B 29 2B 2C 2E
0x0000FDD0 2D 2E 2E 2E 2D 2D 31 2F 2D 2F 2E 2F 2D 2F 2F 2E
0x0000FDE0 2F 2E 32 33 30 32 33 34 34 34 34 34 3C 48 61 74
0x0000FDF0 7D 7E 72 5F 4C 3A 2E 2D 2B 28 26 26 25 28 2A 2B
0x0000FE00 2C 2E 32 32 35 38 36 3C 41 4F 60 71 7D 7B 6F 62
0x0000FE10 52 44 36 35 35 38 34 33 35 35 3A 36 33 34 32 2F
0x0000FE20 2F 2D 2C 2C 2D 2E 2D 2F 31 33 33 35 35 38 35 35
0x0000FE30 33 2F 2C 2C 2E 2D 2E 2D 28 22 1E 1A 16 14 12 13
0x0000FE40 13 13 12 12 14 13 13 13 14 13 11 13 13 11 13 12
0x0000FE50 14 15 17 19 1D 1D 20 1F 21 21 23 22 22 22 22 24
0x0000FE60 26 24 27 2A 1C 1B 1D 1D 1D 1C 1D 1F 1D 1E 1E 1E
0x0000FE70 1F 21 1E 21 20 20 21 1F 21 22 22 22 21 22 23 23
0x0000FE80 24 25 26 25 27 26 25 27 26 28 2A 28 29 2A 2A 2A
0x0000FE90 29 2A 2B 2A 2C 2B 2B 2C 2E 30 33 3A 3F 46 4D 4F
0x0000FEA0 50 4C 47 46 46 44 42 43 44 45 42 43 45 45 45 42
0x0000FEB0 43 43 43 45 45 46 44 43 46 44 43 41 41 3C 3C 39
0x0000FEC0 3B 3A 37 37 34 36 33 3A 36 34 39 37 36 34 39 34
0x0000FED0 35 36 36 35 35 35 33 35 36 36 38 36 36 34 36 35
0x0000FEE0 38 34 36 35 34 33 35 34 34 33 32 34 33 32 32 33
0x0000FEF0 33 30 35 34 32 33 31 32 2F 2D 2C 2C 2B 2A 2B 2C
0x0000FF00 2D 2C 2A 2B 29 2B 2C 2B 2B 2A 2C 30 2D 30 30 30
0x0000FF10 33 32 31 34 35 35 35 35 34 38 34 39 36 38 38 36
0x0000FF20 38 38 36 35 38 38 38 38 3A 3A 35 38 38 37 34 35
0x0000FF30 3E 4D 64 7C 8A 89 7B 64 4F 3F 34 33 2F 2B 29 29
0x0000FF40 28 26 28 2B 2C 2C 30 34 36 3B 3E 40 45 52 63 77
0x0000FF50 81 80 75 66 57 49 3F 3D 3A 3B 39 39 38 39 3B 3B
0x0000FF60 3B 39 38 34 32 33 32 2F 32 32 2F 30 31 32 34 36
0x0000FF70 38 36 37 35 34 2F 2E 2D 2E 2F 2F 2E 2C 26 1F 19
0x0000FF80 16 15 15 12 13 13 13 13 14 13 14 14 14 12 14 13
0x0000FF90 14 12 12 12 13 17 16 1A 1C 1D 22 22 23 25 26 25
0x0000FFA0 25 26 26 24 26 24 25 24 1C 1B 1C 1C 1C 1C 1C 1C
0x0000FFB0 1D 1F 1E 1E 1F 1E 1E 1D 1F 1F 20 21 20 21 22 22
0x0000FFC0 22 21 25 23 24 25 24 25 25 26 27 27 25 27 25 28
0x0000FFD0 29 29 29 2A 29 2A 2A 2B 2B 2C 2B 2B 2B 2C 34 39
0x0000FFE0 3F 45 4A 4D 4C 4A 49 46 48 47 46 46 45 44 46 45
0x0000FFF0 48 47 46 47 46 46 43 47 47 48 45 46 45 44 44 42
0x00010000 42 40 3D 3B 39 39 38 35 36 38 36 34 36 39 36 38
0x00010010 34 36 38 35 36 36 36 36 38 35 3B 38 38 39 3B 3A
0x00010020 3A 39 3A 39 3A 3A 3A 39 3B 3A 39 3A 38 38 35 37
0x00010030 36 38 38 35 35 39 39 39 3C 3B 3B 39 37 35 33 32
0x00010040 33 34 34 34 31 31 2F 31 31 32 30 31 31 30 35 36
0x00010050 38 3A 36 39 3B 3D 3B 3E 3F 3E 3C 3E 3D 3E 40 3E
0x00010060 42 42 41 40 42 44 41 41 3E 42 3F 3F 41 3E 3B 3F
0x00010070 39 37 38 39 3D 4F 67 81 91 91 85 69 52 43 3A 37
0x00010080 33 2F 2A 27 28 29 28 2C 2E 2F 30 33 39 3A 3C 41
0x00010090 45 53 62 75 80 81 76 6D 57 48 43 40 3E 40 3D 3A
0x000100A0 3C 3C 3E 3D 3B 3B 39 3A 39 38 38 37 35 37 34 34
0x000100B0 32 34 35 35 35 36 33 33 30 2C 2B 28 2C 2D 2D 2E
0x000100C0 29 25 1D 18 14 14 12 13 13 13 14 14 13 14 14 13
0x000100D0 13 14 13 13 13 12 13 14 14 15 19 1B 1B 1F 21 22
0x000100E0 26 28 2A 2A 29 28 28 26 28 27 26 26 1B 1C 1C 1D
0x000100F0 1B 1C 1C 1E 1D 1D 1F 1F 1F 1F 1E 1F 21 20 20 21
0x00010100 1F 21 20 23 22 21 23 22 23 23 24 25 24 26 26 26
0x00010110 26 28 27 26 28 27 28 29 29 29 2A 28 2A 29 2B 2A
0x00010120 2C 2E 31 39 3D 43 46 4A 4D 49 49 48 47 49 47 48
0x00010130 4A 48 47 49 48 4A 4A 4B 4A 49 4C 4B 4B 48 4C 4B
0x00010140 4A 49 47 47 46 45 41 43 3E 3B 3E 3C 3A 3C 3A 3A
0x00010150 3A 38 3A 3A 3B 3D 3B 3C 3B 3A 3A 3D 3C 3A 3C 3C
0x00010160 3F 41 41 41 40 42 44 42 43 43 41 43 42 46 43 44
0x00010170 41 3F 3E 3E 3D 3F 3C 3D 3D 3D 3E 42 43 48 45 46
0x00010180 44 3E 3E 3C 3F 3E 40 3B 3A 39 36 38 39 38 38 38
0x00010190 3A 3B 3F 41 41 43 44 45 48 47 47 48 48 48 47 46
0x000101A0 49 4A 4A 4A 4B 4B 4B 50 4D 4C 4A 4A 47 4C 47 47
0x000101B0 43 42 3D 3F 3F 3A 38 3A 43 4E 6A 82 8E 93 84 6A
0x000101C0 54 45 3E 3B 34 31 2D 2A 28 29 2C 2C 2C 2D 30 32
0x000101D0 34 3A 39 40 43 4E 5B 68 72 74 6C 60 51 4A 44 42
0x000101E0 3F 3E 3C 3A 39 3D 3E 41 3D 3C 3C 3C 3C 3B 3B 3C
0x000101F0 3B 3C 3D 3B 38 3B 3A 38 38 35 33 30 2D 29 2A 29
0x00010200 29 2D 2D 2B 26 23 1E 18 16 13 13 12 13 13 13 14
0x00010210 13 14 14 13 12 13 13 13 14 14 13 12 14 15 17 1A
0x00010220 1D 21 23 24 2A 2B 2C 2F 2D 2F 2C 2A 2B 2C 29 28
0x00010230 1C 1B 1A 1D 1C 1D 1D 1B 1C 1D 1F 1E 1E 1E 1D 20
0x00010240 1E 1F 21 20 20 1E 20 22 22 20 23 22 22 21 24 21
0x00010250 25 24 25 25 26 25 27 26 27 27 26 26 28 28 2A 28
0x00010260 2A 2A 29 2B 2A 2B 2D 36 3B 41 46 49 4B 4C 4B 4E
0x00010270 4B 4C 4C 4D 4C 51 51 51 52 52 53 52 52 51 51 51
0x00010280 52 52 54 52 53 53 4E 4E 4E 4C 4B 47 47 43 43 43
0x00010290 41 42 41 3D 3C 3C 3E 41 42 41 3F 3E 3D 3C 3D 3F
0x000102A0 42 40 42 44 43 47 4A 4C 4C 4E 4B 4C 4D 4D 4E 4D
0x000102B0 4F 4D 4E 4C 4A 47 43 42 43 42 43 43 41 42 47 4A
0x000102C0 4D 4E 4F 4F 4E 4A 48 49 49 4A 45 42 40 3E 3A 3C
0x000102D0 3D 3F 3C 3B 42 44 47 4A 4B 4A 4D 4D 50 51 50 50
0x000102E0 4F 51 50 53 50 52 53 55 53 54 53 55 53 51 56 52
0x000102F0 52 50 4C 48 47 45 44 40 3D 3E 3D 3C 42 4D 5F 76
0x00010300 86 86 7A 67 52 43 3E 38 35 33 2C 2B 2A 28 28 2B
0x00010310 2A 2E 2F 32 32 35 37 3C 41 46 53 59 5F 64 5B 53
0x00010320 4A 41 3D 3D 3C 3C 3B 39 38 39 3A 3B 3C 39 3B 3A
0x00010330 3C 3E 41 3E 41 42 43 41 3F 3F 3C 3B 3A 36 34 30
0x00010340 2B 2B 27 28 2B 2C 2E 2D 2A 24 1E 19 15 13 12 12
0x00010350 12 12 12 13 13 14 13 13 14 13 13 14 14 14 12 13
0x00010360 13 15 16 1A 1D 1E 24 27 2C 2E 30 33 31 2F 2D 2D
0x00010370 2F 2D 2B 2A 1B 1C 1C 1B 1C 1E 1D 1C 1D 1C 20 1E
0x00010380 1E 1E 1E 1E 1E 1E 20 20 20 20 20 20 23 21 21 22
0x00010390 22 20 23 24 23 21 23 25 24 25 26 26 25 25 28 28
0x000103A0 28 28 26 28 28 29 2A 28 2B 2C 2B 2E 38 3A 41 45
0x000103B0 4A 4C 4E 52 52 52 54 54 58 57 53 59 5A 58 59 59
0x000103C0 59 5B 5B 5B 5B 5C 5C 5C 5B 5B 57 55 53 54 52 53
0x000103D0 51 4A 49 47 44 45 41 3F 3E 3D 42 43 45 43 44 41
0x000103E0 3C 3E 3E 3F 42 44 44 47 47 47 4E 51 53 56 58 57
0x000103F0 59 57 5A 57 58 56 57 55 54 4E 4C 49 46 44 46 46
0x00010400 45 45 47 4C 52 56 59 5C 56 53 54 51 4F 51 4C 4C
0x00010410 45 42 40 3C 3A 3C 3E 44 48 4B 4C 4E 53 55 54 57
0x00010420 58 59 58 5B 56 57 57 57 57 58 57 5B 5B 58 5A 5D
0x00010430 59 5A 57 57 55 55 4E 4B 4B 47 43 42 3E 42 42 41
0x00010440 46 4B 5C 6A 71 77 6B 5F 4D 44 3B 38 34 31 2F 2B
0x00010450 29 26 29 2A 2C 2D 2E 32 31 31 35 34 38 3E 44 4C
0x00010460 52 53 4F 46 41 3A 34 35 38 36 32 31 34 33 35 39
0x00010470 39 39 39 39 3A 3B 3E 40 40 46 44 44 3E 42 41 3C
0x00010480 3D 39 35 32 2F 2B 2A 2B 2D 2D 31 2F 2E 29 21 1B
0x00010490 16 14 13 12 14 13 13 12 13 13 13 14 13 14 14 13
0x000104A0 12 11 12 13 14 15 18 1A 1D 21 27 2A 2F 2F 35 35
0x000104B0 34 30 2F 2C 2E 2B 2B 2B 1A 1C 1A 1B 1D 1D 1D 1D
0x000104C0 1E 1D 1D 1E 1E 1F 1D 1E 1F 1F 1F 1E 21 20 20 22
0x000104D0 21 23 22 22 21 22 21 24 24 26 23 22 25 23 25 26
0x000104E0 27 27 27 27 27 27 28 26 27 27 28 28 28 2A 2A 2C
0x000104F0 32 35 3B 41 47 4A 50 55 54 58 59 5A 5C 5D 5D 5E
0x00010500 62 63 5E 62 5F 60 62 62 64 60 62 63 63 63 5C 59
0x00010510 55 57 56 55 56 52 4F 4E 47 46 45 43 3D 3F 41 44
0x00010520 42 46 46 42 3D 3F 3D 3F 40 44 46 48 4C 4C 4E 52
0x00010530 57 60 5F 64 64 62 61 5F 63 64 64 61 5F 5A 53 4D
0x00010540 49 47 45 49 48 48 4D 4F 55 5C 5F 62 5F 5A 58 59
0x00010550 57 56 51 50 4B 47 42 3C 3C 3D 40 48 4A 4C 54 53
0x00010560 59 5B 59 57 58 59 5C 5B 5D 5C 5C 5C 5C 5D 5B 5C
0x00010570 5A 5C 5B 5B 59 5A 59 58 56 56 4F 4D 4C 4A 46 44
0x00010580 43 48 47 46 46 4A 4F 5A 61 65 5F 54 49 3E 39 34
0x00010590 32 2E 2C 28 27 28 2A 2B 2F 2D 2E 30 2F 31 31 30
0x000105A0 33 36 3C 3F 46 49 43 3E 39 32 31 30 2E 2E 2E 2E
0x000105B0 2D 31 34 34 38 36 38 34 35 35 3B 3C 3D 41 45 43
0x000105C0 45 41 42 3D 3C 39 32 31 2D 2B 2A 28 2B 2D 2F 30
0x000105D0 2E 27 21 1A 17 14 12 12 12 12 12 14 13 13 13 14
0x000105E0 13 13 13 13 12 11 13 13 14 15 18 1B 1F 21 25 28
0x000105F0 2E 34 35 33 33 31 2E 2C 2D 2C 2D 2C 1C 1D 1C 1E
0x00010600 1D 1E 1D 1D 1F 1E 1E 1D 1E 1F 1D 1F 1E 1F 1E 1E
0x00010610 1F 1F 1F 20 21 22 22 22 21 20 22 21 22 23 22 24
0x00010620 24 25 25 25 26 27 23 27 27 26 26 28 27 26 28 27
0x00010630 28 29 29 2C 2D 31 35 3C 43 48 4D 55 57 59 5D 5F
0x00010640 5F 64 64 64 67 65 67 67 67 67 6C 69 69 6D 6C 6C
0x00010650 69 68 64 60 5C 58 58 5A 59 57 54 4F 4D 47 45 44
0x00010660 3D 3D 3D 3F 42 46 44 47 43 3E 3E 3E 40 44 45 4A
0x00010670 4B 4F 52 58 5C 63 67 6D 6E 6B 6C 6D 6C 6C 6C 67
0x00010680 63 62 5B 55 4F 4C 48 47 4D 4D 4F 53 55 5C 62 62
0x00010690 5F 5E 5D 58 5B 57 53 51 4A 46 41 3C 39 3B 41 45
0x000106A0 4A 4E 55 56 58 59 57 58 59 57 56 5C 59 5A 5A 5B
0x000106B0 58 58 57 59 59 5A 5A 57 55 57 56 56 52 50 4E 50
0x000106C0 4D 49 48 48 49 4E 4B 49 46 46 4B 50 56 57 56 4B
0x000106D0 41 3B 38 32 2E 2D 29 28 27 28 28 2A 2D 2F 2C 2E
0x000106E0 2C 2E 2D 2F 2D 33 34 3A 3E 3F 3F 3B 36 32 2D 2B
0x000106F0 28 28 2A 2B 2A 2C 2E 32 36 31 32 30 33 31 33 38
0x00010700 39 3F 41 41 43 40 3D 3A 3B 35 31 2E 2C 2B 29 28
0x00010710 29 2C 2C 2B 29 25 1E 1A 14 13 12 12 13 13 13 13
0x00010720 14 13 14 14 13 13 13 12 13 13 12 11 14 15 19 1E
0x00010730 1F 24 2A 29 2F 32 34 36 31 30 2D 2C 2D 2E 30 2E
0x00010740 1B 1C 1C 1C 1E 1E 1D 1E 1E 1D 1F 1D 1C 1E 1F 1E
0x00010750 20 20 1E 1E 1F 1F 21 22 21 1F 20 21 22 21 21 22
0x00010760 20 23 24 23 23 23 25 23 24 26 25 25 25 26 26 27
0x00010770 26 26 28 26 28 28 28 2C 2B 2D 30 38 41 49 4E 54
0x00010780 56 59 5C 5E 65 67 6C 6E 6D 6D 71 6E 72 70 71 70
0x00010790 71 71 70 71 71 6E 68 62 62 60 60 65 62 5E 58 52
0x000107A0 4F 4B 48 46 3F 3F 41 41 42 43 44 47 43 43 3F 3F
0x000107B0 40 3F 44 49 4D 51 52 57 5E 63 6A 71 72 75 76 78
0x000107C0 77 79 76 74 6B 66 64 5D 58 52 4B 47 4B 4E 50 55
0x000107D0 57 57 5E 5D 5E 5C 5A 5B 57 57 54 4D 4A 45 3E 3D
0x000107E0 3B 3B 3F 44 45 4D 50 54 57 56 53 54 56 56 55 55
0x000107F0 56 57 56 58 56 56 54 57 56 55 53 55 53 54 53 52
0x00010800 50 50 50 4E 49 48 46 48 4D 51 4D 4B 4A 46 48 46
0x00010810 4A 4D 4B 46 3E 39 32 2F 2A 2A 28 25 26 28 2A 2B
0x00010820 2F 2F 30 31 2F 2D 2B 2C 2E 2D 2F 37 39 3B 3A 39
0x00010830 35 2F 2C 2A 27 25 24 26 26 2A 2A 2E 30 2F 30 2F
0x00010840 2F 2E 2F 35 39 3C 3C 3D 3E 3E 3C 38 35 35 31 2F
0x00010850 2C 2C 29 29 2A 2D 2F 2F 2B 24 1F 1A 17 14 13 12
0x00010860 11 13 13 13 13 13 12 12 13 14 13 12 12 13 12 14
0x00010870 14 17 1A 1F 23 27 2B 2E 32 32 33 34 30 2D 2C 2C
0x00010880 2C 2F 31 36 1A 1B 1B 1C 1E 1C 1D 1D 1C 1F 1E 1E
0x00010890 1E 1D 1D 1D 1F 1F 1F 21 20 22 1F 20 22 1F 21 22
0x000108A0 21 21 21 21 22 22 24 23 24 25 24 24 24 25 27 26
0x000108B0 26 25 25 27 26 27 24 28 26 27 27 2A 2A 2A 2F 38
0x000108C0 3E 4A 57 5D 65 64 61 62 64 6A 6C 72 73 74 75 75
0x000108D0 74 78 74 79 76 78 78 79 78 77 6E 6B 67 66 6A 6C
0x000108E0 67 65 60 59 53 4F 4A 49 47 40 41 43 42 47 46 47
0x000108F0 4A 45 3F 41 42 43 46 48 4C 4E 54 58 5C 63 66 6C
0x00010900 75 7A 7B 7D 7B 7B 7B 79 77 70 6B 65 61 5B 53 4E
0x00010910 4D 4E 51 55 54 53 58 58 58 59 56 59 57 52 52 4F
0x00010920 49 44 41 3F 3D 3E 40 44 47 4A 4E 4F 51 52 51 52
0x00010930 52 54 54 54 54 52 55 56 56 53 53 51 53 53 55 53
0x00010940 54 4F 4F 50 4E 50 4C 49 48 48 4B 50 57 55 53 4E
0x00010950 4C 4A 45 45 4A 49 46 42 3F 38 31 2E 29 28 27 26
0x00010960 27 29 2B 2A 2E 2F 2F 2F 2D 2B 2A 29 2C 2E 31 35
0x00010970 3F 40 41 3D 39 32 2A 27 24 24 22 23 25 27 28 2A
0x00010980 2F 2E 2D 2E 2C 2C 2C 30 36 3C 3E 3D 3E 3E 3B 3A
0x00010990 36 35 31 31 30 2B 2F 2A 2F 30 32 33 32 2C 21 1B
0x000109A0 17 15 13 12 12 12 13 13 14 15 14 12 12 14 12 13
0x000109B0 14 13 13 13 16 1A 1D 1F 26 28 2F 31 33 31 35 32
0x000109C0 2E 2B 2C 2B 2E 31 32 38 18 1A 1A 1B 1C 1C 1E 1D
0x000109D0 1D 1D 1C 1D 1D 1F 1D 1D 1D 1D 1E 1F 1F 21 1F 1F
0x000109E0 1D 1F 20 21 1E 22 23 21 21 22 22 24 23 23 22 24
0x000109F0 24 25 24 25 24 25 26 25 25 24 25 27 27 26 27 28
0x00010A00 28 2A 2F 36 41 4D 64 75 7C 73 6E 6A 65 6B 6D 71
0x00010A10 74 76 75 78 76 77 7A 79 79 79 7B 7B 7B 7A 71 70
0x00010A20 6E 6C 6C 73 6E 6A 62 5B 58 50 4C 4C 48 45 42 42
0x00010A30 41 44 45 45 47 46 44 45 43 3F 45 45 45 4E 52 57
0x00010A40 5A 5E 65 6B 72 78 7B 80 7E 7F 7E 7F 7B 76 72 6A
0x00010A50 64 61 5A 53 4D 4D 50 52 56 55 58 56 55 53 52 53
0x00010A60 53 52 4F 4C 48 44 43 41 3D 3F 43 47 46 4C 4D 4E
0x00010A70 4D 4E 4E 4F 4E 52 4D 51 4F 4F 4F 4D 4D 4E 4D 4E
0x00010A80 4F 4B 4D 4C 4C 4D 4C 49 4B 48 47 47 49 4A 4F 54
0x00010A90 55 57 58 54 4F 47 47 49 4D 4F 50 46 3F 35 2E 2C
0x00010AA0 26 25 25 23 26 26 28 28 2B 2F 2C 2E 2D 2B 2A 29
0x00010AB0 2D 31 35 3D 4A 4C 4B 46 3E 33 2B 25 22 21 22 21
0x00010AC0 21 23 25 26 27 2A 2A 2A 29 2A 2C 30 38 3B 3F 41
0x00010AD0 3F 3D 3A 3C 39 35 34 30 30 2F 2B 2B 2F 33 35 35
0x00010AE0 34 2B 24 1B 17 13 13 11 12 12 12 13 13 13 13 13
0x00010AF0 13 12 14 12 14 14 14 14 19 1C 20 24 26 2E 2F 2F
0x00010B00 33 30 30 2F 2D 2D 2A 2D 2E 30 35 38 17 19 19 19
0x00010B10 1A 1B 1D 1C 1B 1D 1D 1D 1E 1D 1E 1E 1E 1E 1E 1F
0x00010B20 1E 1F 1F 22 1E 1F 20 21 21 20 22 20 22 21 21 22
0x00010B30 22 22 22 22 23 24 23 23 24 24 25 23 25 25 24 24
0x00010B40 25 27 27 27 27 2A 2E 36 44 59 78 8E 9A 8E 7C 71
0x00010B50 67 69 6C 70 74 76 78 75 74 77 76 75 78 7A 79 7A
0x00010B60 7A 79 72 74 71 75 73 73 73 6D 69 63 5C 57 4F 4B
0x00010B70 4A 46 44 42 44 43 45 46 45 46 47 45 45 41 42 45
0x00010B80 47 48 4D 51 57 5A 60 66 6C 73 77 7D 7C 7E 79 81
0x00010B90 7E 7C 76 72 6D 65 5F 5A 57 4D 4B 4C 4F 50 52 52
0x00010BA0 50 4F 50 4C 4D 4B 4B 49 47 46 41 42 41 41 41 44
0x00010BB0 44 47 46 47 45 4A 47 48 4A 48 4A 49 49 4A 4B 49
0x00010BC0 47 49 47 48 48 4A 4B 49 49 48 47 47 48 47 45 4A
0x00010BD0 4B 4F 53 59 58 5C 5A 56 52 4B 4D 54 5B 5F 5F 53
0x00010BE0 47 3A 2F 2A 25 23 23 24 24 24 24 28 2C 2E 2D 2E
0x00010BF0 2C 2D 2C 2B 2D 34 3D 4C 56 5D 59 51 45 3A 2D 25
0x00010C00 21 1F 20 1F 1F 1F 22 22 25 24 28 26 27 2A 2E 32
0x00010C10 35 3D 40 44 45 43 3F 3C 38 38 33 34 2F 32 30 31
0x00010C20 2F 33 35 33 2F 2A 22 1C 17 14 13 13 13 13 13 13
0x00010C30 13 14 13 13 14 14 15 15 14 15 16 17 1B 20 24 29
0x00010C40 2F 33 35 34 34 33 2E 30 2B 2B 2E 2C 2E 30 31 32
0x00010C50 16 16 16 19 1A 19 1C 1A 1D 1C 1C 1A 1C 1B 1C 1D
0x00010C60 1B 1D 1F 1E 20 1C 20 1F 1D 1E 1F 20 21 20 21 22
0x00010C70 22 22 20 21 22 24 21 21 23 24 23 22 22 22 24 24
0x00010C80 23 23 25 24 25 26 26 27 27 29 2C 36 47 61 86 9B
0x00010C90 AC 9D 87 72 6A 66 6A 6E 71 74 74 76 73 76 74 77
0x00010CA0 77 76 7A 75 76 79 78 74 73 79 79 76 79 71 6C 68
0x00010CB0 5E 5B 56 51 4A 49 47 45 42 41 42 44 47 45 48 46
0x00010CC0 45 44 41 41 45 47 48 4C 54 58 5B 60 64 69 74 79
0x00010CD0 7A 7E 7D 7A 7E 7B 7C 77 6D 6B 65 60 5A 55 4D 4E
0x00010CE0 4D 4B 4D 49 4B 4A 4B 48 49 47 45 43 44 43 40 42
0x00010CF0 3F 41 42 43 45 45 44 46 44 45 44 44 46 47 47 47
0x00010D00 49 48 49 49 4A 49 49 4A 4C 48 48 4D 48 49 48 4B
0x00010D10 4B 4A 4C 4F 53 56 56 5A 5E 5E 5D 59 53 53 55 62
0x00010D20 6C 73 70 64 51 3E 31 29 26 22 20 20 22 21 24 26
0x00010D30 27 28 2B 2D 2D 2E 2B 2F 34 3A 46 59 60 6A 66 5D
0x00010D40 4F 3E 30 29 25 21 21 1F 1E 1E 1E 21 22 23 22 24
0x00010D50 26 2B 2E 33 36 3E 44 46 46 47 45 3E 3D 39 39 35
0x00010D60 34 33 32 33 34 36 35 2F 2D 29 22 1B 18 14 15 14
0x00010D70 15 15 13 15 15 16 17 17 18 17 18 17 19 1A 1C 1E
0x00010D80 22 27 2A 2E 32 34 35 34 32 2F 2E 2E 2B 2A 2D 2D
0x00010D90 2F 32 30 2E 17 14 14 16 18 18 18 1A 1C 1C 1B 1C
0x00010DA0 1E 1C 1D 1E 1C 1D 1D 1E 1E 1F 1D 1F 1E 1F 1E 1D
0x00010DB0 1E 1E 21 20 20 21 23 22 22 23 21 22 23 23 22 22
0x00010DC0 23 24 23 25 23 24 24 25 26 25 26 25 26 2B 2C 38
0x00010DD0 46 63 83 9E AB A2 86 6E 64 66 6A 6F 72 72 71 72
0x00010DE0 71 71 72 76 74 73 74 74 79 75 79 74 75 77 78 76
0x00010DF0 7A 75 73 6B 64 5E 5B 53 4D 4A 49 48 47 42 43 42
0x00010E00 44 47 45 44 47 47 41 42 42 46 46 4A 4E 4F 58 5A
0x00010E10 5F 67 68 72 7B 7C 7D 7E 7E 7F 7C 7B 79 6F 68 67
0x00010E20 5D 5C 55 51 4D 4C 4E 4D 4D 4B 4A 4B 48 46 48 48
0x00010E30 48 47 47 46 46 47 44 47 48 47 49 48 47 4C 4B 49
0x00010E40 4A 4C 4D 4C 4F 50 4D 50 51 52 50 4E 53 4F 51 50
0x00010E50 51 51 51 52 54 50 54 56 56 58 5A 5F 63 61 60 59
0x00010E60 53 55 5D 6A 77 7E 7A 6D 5A 47 36 2C 27 25 20 23
0x00010E70 23 22 23 25 28 28 28 2B 2C 2E 30 34 38 40 4C 5B
0x00010E80 67 6E 68 62 56 45 35 2F 28 27 25 22 1F 1F 1D 22
0x00010E90 21 24 25 25 27 29 30 34 39 41 47 4A 4B 48 48 44
0x00010EA0 42 41 3D 3A 3A 39 3B 39 39 37 35 32 30 2A 24 1F
0x00010EB0 1B 1B 18 18 19 19 19 1B 1B 1C 1D 1D 1E 1E 1E 1F
0x00010EC0 21 20 23 26 2B 2D 2F 35 35 39 36 32 31 2E 2A 2A
0x00010ED0 29 2D 2E 32 33 31 31 2D 17 16 15 15 15 16 17 18
0x00010EE0 18 1A 1A 1B 1D 1B 1C 1D 1D 1E 1C 1E 1D 1D 1D 1E
0x00010EF0 1E 1E 1F 1E 1E 1E 20 1F 20 20 21 20 1F 21 22 23
0x00010F00 20 23 22 24 23 24 23 23 24 23 23 23 25 24 26 25
0x00010F10 24 28 2C 34 42 58 75 86 97 8F 79 69 63 61 66 6C
0x00010F20 6F 70 72 6F 72 71 70 73 72 72 74 72 74 76 74 75
0x00010F30 73 75 73 73 77 77 73 71 69 64 5F 59 54 4F 4B 47
0x00010F40 46 46 42 42 42 45 44 44 49 44 44 43 41 43 44 45
0x00010F50 48 4D 50 56 5B 60 61 67 71 7B 7B 78 7E 7F 7C 76
0x00010F60 77 74 6F 68 65 5C 5A 55 56 54 54 52 50 50 4E 4D
0x00010F70 50 4E 4D 50 4E 4F 4C 4F 4D 4D 4F 4D 4D 4F 50 4E
0x00010F80 50 4F 4F 52 50 54 52 56 54 55 57 56 54 54 55 56
0x00010F90 57 55 54 56 55 55 58 57 56 58 57 59 5E 5C 5D 61
0x00010FA0 66 66 62 5A 56 58 5F 6D 79 7F 7D 6D 5E 49 39 2F
0x00010FB0 29 28 26 23 23 23 26 25 26 28 28 29 2E 31 35 39
0x00010FC0 3B 40 4E 5A 66 6A 69 5F 51 44 39 31 2D 2B 26 24
0x00010FD0 20 1F 21 21 23 24 25 26 27 2A 2E 34 3A 43 48 4B
0x00010FE0 4B 49 4A 49 45 45 44 41 3F 43 3F 3E 3E 3E 38 38
0x00010FF0 34 2D 2B 26 24 21 22 20 1F 23 22 22 24 24 25 27
0x00011000 28 26 27 28 2B 2A 2B 2E 31 33 34 36 39 39 34 34
0x00011010 2E 2C 2B 2B 2B 2D 31 33 32 34 32 32 18 16 14 14
0x00011020 13 14 15 15 17 18 19 19 1A 1B 1B 1B 1C 1C 1D 1E
0x00011030 1D 1D 1D 1D 1C 1F 1E 1E 1F 1E 1F 1F 20 1F 1F 1F
0x00011040 20 22 22 21 21 23 22 21 23 23 22 22 24 23 24 23
0x00011050 24 24 24 24 24 26 2A 31 3D 4D 60 72 7A 76 6D 63
0x00011060 5E 63 6B 6C 71 6E 6C 6F 6E 6C 70 70 6E 73 73 71
0x00011070 72 72 72 72 71 75 75 75 76 74 74 72 71 6B 66 5D
0x00011080 5A 56 4D 48 49 47 46 40 3E 43 42 44 46 44 45 47
0x00011090 43 40 43 43 46 4A 4E 50 57 5D 5F 63 6A 71 73 7A
0x000110A0 7C 7B 79 7D 7B 76 76 70 69 63 5E 5C 5A 5C 5C 58
0x000110B0 58 55 54 54 59 54 54 51 51 55 56 57 53 56 52 54
0x000110C0 56 56 57 57 54 54 58 55 5B 56 59 5A 5B 5A 5B 5A
0x000110D0 5B 5B 5B 5B 5C 5B 59 5C 5A 5B 5C 5C 5C 5E 5D 5E
0x000110E0 61 61 64 65 66 64 63 59 57 56 5D 6B 79 7B 76 6A
0x000110F0 5A 4A 3B 34 2D 2C 26 25 23 22 22 26 27 28 28 29
0x00011100 2C 30 34 3A 3A 41 4A 53 5C 5E 5C 55 4A 3F 36 2F
0x00011110 2C 2B 28 25 20 20 21 22 24 23 26 27 27 2A 30 33
0x00011120 3B 43 45 4A 4C 4C 4B 4D 48 47 44 46 46 45 44 44
0x00011130 43 41 3F 3E 39 35 30 2E 2B 29 28 2A 29 2B 2B 2D
0x00011140 2C 2C 2D 2D 30 32 2F 2E 31 32 32 34 34 38 3B 3A
0x00011150 39 35 34 31 2F 2B 2B 2B 2B 2E 2F 34 35 35 34 32
0x00011160 18 15 14 14 13 15 15 15 15 15 15 19 18 19 18 1B
0x00011170 1A 1B 1C 1C 1C 1E 1F 1D 1D 1F 1C 20 1D 1E 1E 1F
0x00011180 20 1F 1F 1F 1F 22 22 20 21 21 21 23 22 23 22 23
0x00011190 23 22 22 23 23 24 24 24 24 26 29 31 3B 48 54 63
0x000111A0 67 69 61 61 62 62 6C 6C 6A 6A 6B 6C 6E 6B 6B 6B
0x000111B0 69 6E 6E 6F 6E 6F 71 72 71 72 72 72 74 74 76 72
0x000111C0 72 6F 6A 63 5D 5A 52 4E 4A 48 48 45 43 41 45 43
0x000111D0 44 47 47 44 46 43 3F 3F 43 47 48 4B 52 54 58 5B
0x000111E0 61 67 70 75 79 7A 76 7A 79 72 73 73 6D 66 65 66
0x000111F0 63 62 5F 5D 5D 5D 5B 58 58 58 5A 5A 5A 59 57 59
0x00011200 58 5A 59 59 59 58 5A 5E 58 59 5C 5E 5D 5D 5A 5F
0x00011210 61 61 60 61 62 5F 60 5F 5D 60 5F 60 5F 5F 62 5F
0x00011220 61 60 66 63 62 65 64 67 67 65 64 59 56 56 56 62
0x00011230 6A 6B 6C 5E 53 47 3B 35 31 2D 28 26 22 24 26 24
0x00011240 29 28 2A 2B 2A 2E 32 35 38 3C 45 4B 51 51 4E 48
0x00011250 3E 38 31 2D 2B 2C 28 25 23 1F 21 22 23 25 26 27
0x00011260 2A 2C 2E 35 3B 41 46 4C 49 48 4B 49 4B 49 46 46
0x00011270 47 45 45 43 44 43 40 42 3C 3A 36 35 31 32 32 33
0x00011280 32 34 36 33 34 36 35 35 35 38 36 35 36 39 37 3B
0x00011290 3B 3B 3D 39 38 36 33 32 2B 2C 2B 2B 2D 31 30 34
0x000112A0 36 38 38 35 1A 15 14 13 13 15 13 15 15 16 15 17
0x000112B0 16 18 17 19 1A 1A 1A 1D 1D 1B 1D 1E 1E 1C 1C 1E
0x000112C0 1F 1D 1E 21 20 1F 1E 1F 20 20 20 1E 21 22 22 21
0x000112D0 21 23 21 22 22 22 24 24 23 23 23 24 24 24 29 31
0x000112E0 3A 49 53 5C 62 64 60 63 63 67 66 69 67 68 69 6A
0x000112F0 66 65 67 63 66 67 66 67 6A 68 69 6E 6D 6F 71 71
0x00011300 73 6F 76 72 74 70 6C 67 64 5C 56 53 4E 4D 47 46
0x00011310 47 42 41 41 42 43 45 46 45 46 42 3E 41 44 45 46
0x00011320 49 4F 55 58 5D 62 68 6D 73 77 79 76 79 79 75 75
0x00011330 72 6E 6D 6B 66 69 66 66 67 64 62 60 60 60 60 62
0x00011340 5E 61 61 61 5E 60 5F 61 5E 62 61 61 62 63 64 62
0x00011350 66 60 65 67 65 65 66 66 66 67 67 65 68 66 68 65
0x00011360 68 68 68 67 68 67 64 62 64 67 68 68 67 65 63 5E
0x00011370 56 56 55 5B 60 61 5B 54 48 3D 38 34 30 2C 28 24
0x00011380 24 22 25 26 28 28 2B 2A 2D 2E 2F 33 36 3A 3E 42
0x00011390 45 45 41 3B 34 32 2E 2C 2A 27 27 25 22 23 20 21
0x000113A0 24 25 25 27 2A 2C 31 37 3C 3F 44 46 48 4A 4A 4A
0x000113B0 4B 48 48 47 46 48 45 44 45 45 42 42 40 3E 3E 3A
0x000113C0 38 3C 3A 39 3A 38 39 3A 3A 3A 3C 37 3A 39 3B 3A
0x000113D0 36 3A 3A 3C 3D 3F 3B 3A 3A 35 33 31 30 2D 2D 2C
0x000113E0 2C 30 32 36 38 3B 39 3C 18 14 13 13 13 13 15 14
0x000113F0 15 15 16 15 17 18 17 18 18 18 1B 1B 1B 1B 1E 1D
0x00011400 1C 1D 1F 1D 1E 1F 1E 1E 1D 1F 1F 1F 20 1F 20 20
0x00011410 20 22 21 20 21 20 21 22 21 22 23 24 23 24 24 23
0x00011420 24 27 2A 31 3B 46 53 5B 62 61 63 65 64 66 68 68
0x00011430 67 66 66 62 60 5E 5C 59 5C 5A 5A 5B 5C 62 62 67
0x00011440 67 6C 70 6D 70 72 74 6F 70 70 6F 6C 65 60 5D 57
0x00011450 52 4C 4C 47 43 41 42 40 3F 44 46 43 46 46 44 3F
0x00011460 41 42 44 43 47 4B 50 52 57 5B 5D 66 6F 73 74 75
0x00011470 75 75 77 74 75 73 6E 71 70 6E 6C 6C 6A 6A 67 67
0x00011480 65 66 65 63 63 65 63 64 65 66 65 63 64 66 63 68
0x00011490 65 68 66 66 66 6B 67 6B 6A 6B 6A 67 6A 6A 6A 6A
0x000114A0 69 67 66 6A 67 68 68 68 6B 67 67 67 69 69 66 66
0x000114B0 64 63 60 5B 52 52 4E 54 54 55 51 46 42 35 34 30
0x000114C0 2E 2D 28 27 25 23 25 27 28 2B 2B 2D 2D 2C 2F 31
0x000114D0 32 36 37 3C 3D 3D 3B 38 31 2C 2C 2A 2A 2A 2B 27
0x000114E0 24 24 22 22 24 27 28 29 2A 30 33 35 3A 41 43 46
0x000114F0 48 49 49 49 4A 48 4A 45 46 47 46 45 45 41 40 41
0x00011500 42 40 3E 3D 3E 3E 3D 3D 3D 3C 3C 3D 3B 3A 3A 39
0x00011510 38 36 35 35 35 37 37 3B 3D 3E 3C 38 38 36 36 33
0x00011520 32 2F 2E 2E 2F 33 34 38 3A 3D 3B 3B 15 13 12 14
0x00011530 13 14 15 13 16 14 15 16 15 18 15 17 17 17 17 19
0x00011540 1A 1A 1C 1C 1E 1E 1D 1F 1D 1D 1E 1D 1F 1E 1E 1F
0x00011550 1E 20 21 20 21 21 20 20 1F 22 21 22 21 22 22 23
0x00011560 22 21 23 25 25 25 29 2E 3C 47 54 5B 63 62 66 65
0x00011570 68 64 64 64 63 5F 5C 57 56 52 4F 4E 4D 4C 4D 4E
0x00011580 4F 57 58 5B 5F 63 69 6A 6E 6D 73 6F 6F 71 6C 6D
0x00011590 6A 69 60 5B 56 51 4C 4A 47 46 42 41 3E 3E 42 43
0x000115A0 44 45 43 43 42 3F 41 41 43 45 49 4B 4E 58 59 5E
0x000115B0 69 6B 6F 73 77 75 74 73 75 76 74 71 71 70 6E 6D
0x000115C0 6B 68 69 6A 6A 68 67 68 67 69 65 67 67 68 65 68
0x000115D0 65 69 67 65 67 67 68 68 68 67 6A 69 6E 68 6C 69
0x000115E0 6F 6B 6A 69 68 6C 6C 6A 69 6A 6B 6A 6B 6A 6A 67
0x000115F0 69 66 67 64 68 65 61 56 53 4F 4D 4A 4C 4A 47 40
0x00011600 38 35 31 32 2F 2D 29 26 24 24 25 29 2C 2D 2E 2E
0x00011610 2F 2F 2F 31 2F 33 33 36 3A 3A 35 35 31 31 30 2C
0x00011620 2C 2C 2C 2B 29 29 29 28 2A 2A 2A 2B 2E 30 33 38
0x00011630 3A 40 42 46 48 47 4A 49 48 46 46 45 48 47 43 45
0x00011640 41 42 3E 40 3C 40 3B 3E 3E 3E 42 41 3C 3D 3C 3C
0x00011650 3C 39 39 36 35 31 32 31 32 33 35 38 3B 3A 38 36
0x00011660 36 36 33 36 34 33 31 2F 30 31 35 35 3A 3A 3A 3A
0x00011670 15 13 13 11 13 13 14 14 14 14 15 14 15 16 17 15
0x00011680 15 17 18 17 19 17 1A 1A 1C 1B 1C 1D 1F 1D 1D 1E
0x00011690 1F 1E 1E 1E 1E 1F 20 1F 1E 1E 1E 20 1F 21 22 21
0x000116A0 23 23 22 21 20 24 22 21 26 25 28 32 3C 47 54 5D
0x000116B0 62 66 69 65 63 65 61 5B 57 54 4D 4B 47 47 46 42
0x000116C0 46 45 46 47 48 49 4D 51 53 5C 60 65 6A 69 6D 6C
0x000116D0 71 6E 6F 70 6D 69 68 5F 5C 56 52 4A 49 45 45 40
0x000116E0 41 3E 40 44 45 44 44 44 45 42 3D 40 40 43 44 49
0x000116F0 4C 52 56 5A 5D 63 69 6F 70 72 73 72 74 75 75 73
0x00011700 72 73 73 6D 6F 6D 6C 67 6B 69 6A 6C 69 67 6A 69
0x00011710 67 68 68 6B 69 69 6B 69 67 6B 6C 69 6B 6B 6B 69
0x00011720 6C 6B 6D 6B 69 6B 6B 6A 6C 6B 6A 6C 69 67 69 68
0x00011730 69 67 68 66 68 65 66 68 68 65 5E 5A 51 4D 4A 45
0x00011740 48 44 42 3A 35 33 31 32 32 30 2E 29 29 28 29 2D
0x00011750 2D 32 33 34 36 32 31 33 31 34 35 38 38 39 38 35
0x00011760 35 33 33 31 32 32 30 2F 30 2C 2F 2E 31 2E 2F 31
0x00011770 34 34 34 35 3C 3E 3F 41 47 48 47 46 45 46 45 44
0x00011780 44 45 42 40 3F 3D 3A 3A 3A 3C 3B 3C 40 43 41 42
0x00011790 3C 38 3D 3C 3D 3D 38 34 33 30 2C 2E 2F 30 34 34
0x000117A0 38 36 34 36 33 35 35 38 38 35 31 32 31 31 32 33
0x000117B0 36 39 36 35 14 13 13 13 14 14 13 14 15 14 15 15
0x000117C0 15 15 15 15 17 17 17 16 17 18 1A 19 1A 1A 1A 1C
0x000117D0 1F 1E 1D 1E 1D 1E 1E 1E 1E 1F 1D 20 20 1F 1F 20
0x000117E0 1F 20 1F 21 22 22 20 1F 22 21 24 23 23 25 28 32
0x000117F0 3D 49 57 5B 62 63 65 64 60 5E 58 53 4D 4A 44 3F
0x00011800 41 3C 3B 3A 3C 3D 3C 3B 3F 40 43 47 49 4F 55 5D
0x00011810 61 67 67 6F 6F 70 6E 71 70 6E 69 68 5E 5B 58 53
0x00011820 4B 47 48 46 42 40 40 3E 43 40 42 44 45 41 42 40
0x00011830 3E 40 43 45 48 4C 53 54 5B 5D 64 69 6F 70 74 73
0x00011840 73 73 70 74 72 73 6F 6E 6E 6C 6A 6C 6A 6B 6B 69
0x00011850 6B 69 67 6C 6A 6C 68 6A 69 69 66 68 68 69 66 67
0x00011860 68 69 69 6D 6A 6B 6A 6B 6A 6B 6A 6B 6D 67 6A 6C
0x00011870 68 6B 69 6B 66 6A 6A 68 65 67 66 67 64 63 5E 5D
0x00011880 55 4E 4A 46 46 44 3E 3B 38 36 36 36 33 32 32 2F
0x00011890 2F 2F 2F 33 35 3A 3C 3A 3D 3B 39 36 39 38 38 3B
0x000118A0 3C 38 3B 3B 38 39 35 38 36 39 36 36 38 35 36 35
0x000118B0 36 34 36 35 35 35 35 39 39 3C 3F 42 43 45 45 46
0x000118C0 46 44 44 45 43 43 44 41 3B 3A 38 35 36 37 37 39
0x000118D0 3E 3F 41 3C 3B 3A 3B 3B 3D 3A 39 33 2F 2E 2D 2C
0x000118E0 2B 2D 2F 31 36 36 34 33 32 34 36 38 36 34 34 31
0x000118F0 2F 31 31 31 31 33 32 32 13 12 13 13 13 15 14 14
0x00011900 15 15 16 15 15 15 16 16 16 17 15 17 18 17 18 18
0x00011910 18 19 1B 1B 1B 1C 1D 1C 1E 1E 1E 1F 1F 20 1F 1F
0x00011920 20 1F 1F 1F 1F 21 1F 1F 1F 20 20 22 20 20 21 22
0x00011930 24 24 28 32 3C 49 54 5C 61 60 62 5E 5D 58 52 49
0x00011940 44 3E 3A 38 34 32 34 34 34 36 35 39 37 39 3B 3E
0x00011950 41 43 4A 4F 57 5F 67 6C 6E 71 6E 72 6C 6F 6C 68
0x00011960 66 5E 5B 55 51 4A 4A 47 44 42 3E 3E 3F 41 42 42
0x00011970 43 43 42 45 41 3F 41 43 45 47 4A 52 55 56 5B 61
0x00011980 67 6D 70 73 70 74 72 71 71 6E 6E 6E 6B 6A 6C 6A
0x00011990 6A 6B 6A 6A 69 69 69 6A 69 6A 68 6A 68 68 67 67
0x000119A0 68 69 69 67 68 67 67 68 67 6A 6B 67 6B 6C 6B 6C
0x000119B0 6D 68 6B 6A 6A 68 67 69 68 69 67 66 67 63 65 65
0x000119C0 66 64 5F 5A 57 4F 4C 48 43 43 41 40 3C 3B 3A 39
0x000119D0 3A 3A 38 36 35 35 36 39 3C 3F 42 44 45 46 42 3F
0x000119E0 3C 3B 38 39 3C 3C 3B 3C 3D 3C 3C 3B 3A 3D 3D 3D
0x000119F0 3C 3C 3B 3C 3A 39 3B 39 33 3A 36 35 37 3A 3A 3E
0x00011A00 41 44 47 46 44 42 42 41 42 44 42 40 3A 32 34 33
0x00011A10 31 32 34 38 3B 3C 3C 3B 39 36 39 3A 3B 3A 36 32
0x00011A20 2A 2B 29 29 2A 2B 2E 30 33 37 34 33 33 33 30 35
0x00011A30 30 32 2E 2D 2E 2C 2C 2E 2E 2F 2E 2E 12 12 12 14
0x00011A40 14 13 14 14 12 14 15 14 14 15 15 16 16 17 16 17
0x00011A50 16 18 18 17 17 18 19 19 1A 1B 1D 1C 1D 1E 1C 1E
0x00011A60 1E 20 1F 1F 20 1E 20 1F 20 1F 21 1F 20 20 1F 21
0x00011A70 20 1E 21 20 22 24 2A 30 3E 45 55 59 60 62 5E 5A
0x00011A80 54 4E 47 40 39 33 31 2F 2E 2B 2E 2C 2B 2E 31 31
0x00011A90 32 33 34 35 37 3A 42 48 4E 56 62 63 6B 6D 6C 6E
0x00011AA0 6E 6F 6D 6F 6C 66 5E 5B 58 52 4A 48 46 45 43 40
0x00011AB0 41 3C 42 41 42 46 43 44 3F 3F 3F 3E 41 43 47 4A
0x00011AC0 52 55 57 5B 60 68 6C 6E 6E 70 73 70 71 73 6F 6C
0x00011AD0 6B 6B 6B 67 6A 69 68 69 68 67 68 68 6B 66 69 67
0x00011AE0 67 66 67 67 65 67 69 66 66 67 69 67 68 66 68 68
0x00011AF0 68 6B 6E 72 6F 6D 67 6B 68 66 65 65 64 64 62 62
0x00011B00 60 63 5F 62 5F 60 5E 5B 56 52 4D 4A 48 45 44 43
0x00011B10 3F 3E 3D 3C 3E 3B 3B 39 3A 39 3A 3B 3E 41 49 4C
0x00011B20 4D 49 46 43 3D 3C 3B 3A 3B 3D 3C 3C 3C 3D 3A 3B
0x00011B30 3F 40 42 43 3E 40 42 3E 43 3E 3B 3B 36 39 33 34
0x00011B40 34 32 37 3B 3F 43 47 46 43 40 3F 40 43 42 3E 3C
0x00011B50 38 32 31 2E 2F 2F 31 32 34 39 3A 36 33 34 35 3A
0x00011B60 3A 3A 35 31 2E 29 28 26 28 2A 2B 2F 33 33 36 33
0x00011B70 32 2D 2C 2C 2C 2C 2C 2A 2A 29 29 29 2A 28 28 26
0x00011B80 13 13 13 13 13 13 14 13 14 14 14 14 15 15 15 15
0x00011B90 16 15 17 16 17 17 18 18 17 19 17 17 18 1A 1B 1A
0x00011BA0 1C 1D 1C 1E 1F 1E 1E 20 1E 1E 1F 1F 1F 21 1F 20
0x00011BB0 1F 1F 1F 21 1F 21 20 21 23 24 29 30 3C 47 54 5C
0x00011BC0 5C 61 5A 54 4E 45 3E 38 31 2D 2B 2A 26 27 27 27
0x00011BD0 26 28 2A 2A 2C 2F 2E 30 31 32 3A 42 48 4E 56 60
0x00011BE0 69 6B 6C 6F 6C 6F 72 6F 6E 6A 65 5F 5B 53 50 4D
0x00011BF0 47 45 43 42 3F 3D 3E 41 41 43 43 43 44 41 3E 3C
0x00011C00 41 44 45 45 4D 4C 53 5A 5B 5F 64 6B 70 6F 6E 6E
0x00011C10 6D 6B 6C 6C 6A 68 69 6A 69 68 67 66 66 67 66 67
0x00011C20 69 65 68 64 67 66 66 64 69 66 63 62 62 67 63 63
0x00011C30 62 64 62 65 66 6A 70 73 70 70 6B 67 65 64 62 61
0x00011C40 5B 5D 5D 5C 5C 5A 5C 5B 58 59 58 56 55 56 53 4D
0x00011C50 4A 48 45 45 41 41 3D 3F 3D 3C 3D 3C 3B 3C 39 3E
0x00011C60 3E 45 47 4B 4D 4A 49 49 44 3F 3B 3B 39 3B 3B 39
0x00011C70 39 3B 3B 3B 42 46 46 47 43 43 41 44 43 44 40 3B
0x00011C80 39 34 32 34 34 35 35 3A 3D 41 46 43 41 41 40 3D
0x00011C90 40 42 41 3D 34 32 2F 2D 2C 2C 2E 32 35 36 39 36
0x00011CA0 33 34 38 36 39 34 36 2F 2B 28 28 25 27 29 28 2C
0x00011CB0 30 31 30 2E 2B 2B 2A 2B 2A 29 28 27 26 27 26 25
0x00011CC0 27 26 25 24 13 12 13 14 15 14 13 14 13 14 14 15
0x00011CD0 16 15 15 15 16 14 17 17 17 18 17 18 16 18 1A 17
0x00011CE0 19 18 19 18 1B 1B 1C 1B 1B 1C 1E 1E 1F 1F 20 20
0x00011CF0 21 1F 1F 1F 1F 1E 21 20 21 21 21 21 22 22 25 2F
0x00011D00 3B 47 54 57 5A 58 52 4E 46 3C 38 2E 2B 26 24 22
0x00011D10 23 20 21 21 22 24 26 27 28 29 29 2B 2C 2E 32 38
0x00011D20 3E 47 4E 56 5F 65 6A 6B 6D 6C 6D 6E 72 6C 6A 62
0x00011D30 60 59 54 50 4A 48 43 43 41 3D 3B 3C 3F 42 42 41
0x00011D40 43 43 40 3D 3E 3F 43 42 46 47 4D 51 54 5A 5F 65
0x00011D50 68 66 6D 68 67 68 69 68 65 67 68 64 64 61 64 65
0x00011D60 62 62 65 62 64 60 64 62 5E 62 5D 5E 60 5C 5F 5F
0x00011D70 5B 5E 5C 5C 5B 5A 5A 5C 61 63 6A 6C 6F 6D 6A 66
0x00011D80 61 5A 58 59 57 55 54 54 54 54 51 54 53 52 52 56
0x00011D90 57 56 57 53 53 4B 49 47 43 41 41 3C 3D 3D 3D 3A
0x00011DA0 3C 3F 3A 3C 41 43 49 4B 4C 4C 49 47 44 42 3D 3B
0x00011DB0 39 38 39 38 38 37 3A 3E 3F 43 47 47 46 42 42 44
0x00011DC0 47 43 42 3B 36 33 30 2F 2F 30 33 36 39 3E 3F 40
0x00011DD0 3D 3C 3C 3B 3D 3E 3D 3A 33 30 2D 2C 2A 2B 2D 2F
0x00011DE0 34 38 33 35 35 33 34 35 2F 31 31 2D 29 28 28 27
0x00011DF0 26 27 29 29 2B 2B 2C 2B 29 26 27 26 25 25 24 24
0x00011E00 24 24 24 23 23 22 23 23 13 12 12 14 14 15 13 13
0x00011E10 14 14 14 14 14 15 13 16 16 16 15 16 17 14 18 17
0x00011E20 17 17 18 17 18 18 19 1A 18 1A 19 1B 1B 1D 1C 1C
0x00011E30 1D 1E 1E 1E 1F 1F 1E 1F 1F 1F 20 22 1F 20 21 22
0x00011E40 21 22 27 31 3A 48 4F 56 59 52 4D 47 3E 36 2E 2B
0x00011E50 27 22 1F 1E 1E 1D 1F 1F 1F 22 23 23 25 26 24 26
0x00011E60 26 2A 2D 32 35 3D 45 4F 5A 5F 67 6B 6B 6C 6E 6F
0x00011E70 6F 6E 6D 67 63 5E 5A 57 53 4A 48 44 43 40 3D 3A
0x00011E80 3A 3F 42 42 43 42 41 40 3D 3F 3F 41 42 48 4A 4F
0x00011E90 50 55 5B 5A 5D 62 64 64 64 5F 62 62 5E 5E 5D 5D
0x00011EA0 5D 5D 5D 5A 5E 5A 5D 5E 5E 5E 5C 5E 5B 5B 58 54
0x00011EB0 54 55 56 53 52 56 51 53 56 55 55 53 57 5F 68 69
0x00011EC0 6B 67 67 63 5C 5A 51 50 4E 4D 4D 50 4E 4D 4C 49
0x00011ED0 4A 4C 4D 50 58 5B 5C 59 55 53 4D 49 44 3F 3F 3F
0x00011EE0 3D 3D 3E 3B 3C 3B 3B 3B 40 43 43 47 47 48 4A 46
0x00011EF0 43 3E 39 35 39 34 33 32 34 34 36 3B 3D 44 43 42
0x00011F00 41 40 42 41 45 46 43 3C 35 32 2F 2C 2C 2F 30 32
0x00011F10 36 3A 3A 38 3A 36 35 3B 3A 3B 38 36 33 30 2B 2A
0x00011F20 2B 2D 2B 2D 31 32 34 35 32 30 2F 2F 2D 2C 2C 2A
0x00011F30 26 27 26 26 26 27 27 25 27 28 26 26 25 25 24 24
0x00011F40 23 23 23 22 23 23 23 22 21 22 22 1F 13 12 12 12
0x00011F50 15 14 12 14 13 13 15 15 15 15 15 15 16 17 17 16
0x00011F60 16 17 17 17 19 17 19 18 18 17 17 18 18 18 19 18
0x00011F70 19 19 1B 1A 1B 1D 1E 1C 1E 1E 1E 1E 1F 1F 1E 20
0x00011F80 20 21 20 1F 21 22 27 2F 39 49 53 58 54 4E 49 41
0x00011F90 39 2E 29 24 1F 1D 1D 1A 1C 1D 1E 1E 1F 21 21 22
0x00011FA0 23 23 23 23 24 26 28 2D 2F 36 3E 48 50 57 63 69
0x00011FB0 6A 6A 6E 6A 70 6D 6E 6F 6B 62 5E 59 54 50 4A 45
0x00011FC0 44 41 3C 39 3B 3D 3F 3F 41 43 42 3F 3F 3D 3D 3E
0x00011FD0 41 43 45 49 51 53 52 53 55 59 58 57 58 58 57 58
0x00011FE0 58 54 52 53 54 54 53 52 53 54 57 5C 5F 5D 5D 5A
0x00011FF0 59 56 53 4D 4F 4F 51 4C 4A 4C 4F 4D 4C 4B 4F 52
0x00012000 50 59 64 65 66 63 60 5F 5B 54 50 4B 48 4A 4B 47
0x00012010 4A 48 49 46 46 4A 4C 4D 54 57 58 58 56 50 4B 47
0x00012020 45 3E 3B 39 3B 37 3B 39 38 39 39 3A 3F 41 43 48
0x00012030 45 44 45 43 41 3A 35 35 32 30 30 30 31 33 35 3B
0x00012040 3D 42 43 41 40 40 3F 3E 41 41 3F 3B 35 32 2E 2D
0x00012050 2C 2C 2F 32 32 36 36 32 31 33 33 32 33 34 34 32
0x00012060 31 2F 2C 29 2B 29 29 2B 2D 2E 2E 31 2E 2C 29 2C
0x00012070 2A 2C 28 29 27 26 25 25 25 27 25 25 26 25 24 25
0x00012080 23 24 23 23 23 21 22 22 20 20 20 21 21 1E 1F 1E
0x00012090 13 13 13 13 14 13 14 14 14 15 14 13 14 14 14 16
0x000120A0 14 15 16 16 17 17 16 16 17 17 18 17 17 17 17 16
0x000120B0 17 17 17 16 19 18 18 19 1A 19 1C 1C 1E 1D 1D 1F
0x000120C0 1F 1E 1E 1F 1F 1E 20 21 1F 21 27 2D 3B 48 54 56
0x000120D0 51 4A 43 39 32 2B 25 1E 1C 1A 1A 1C 1D 1D 1E 1E
0x000120E0 1F 21 23 21 22 22 22 21 23 23 24 27 2D 31 36 42
0x000120F0 48 54 5E 64 6A 6B 6C 6C 6D 6E 71 6D 6A 6A 60 5E
0x00012100 5A 54 53 4B 48 44 3F 3E 3A 3B 3E 3B 3E 41 43 42
0x00012110 41 3E 3B 3D 3B 3F 43 47 4A 4C 52 4F 50 52 52 52
0x00012120 51 52 4E 52 4F 4F 4D 4D 4E 4C 4F 4D 4F 51 56 5B
0x00012130 5F 60 5F 5E 5D 57 54 4D 4B 4A 49 48 4C 4A 49 49
0x00012140 4C 48 49 4C 4D 57 5E 60 61 5C 5D 5C 56 51 4B 47
0x00012150 44 44 45 42 41 42 44 42 41 3F 43 48 4B 4F 53 53
0x00012160 50 4E 46 41 3E 3B 39 34 38 35 37 35 32 35 33 36
0x00012170 3C 40 44 46 48 45 45 42 40 3B 35 33 31 31 2D 2E
0x00012180 31 30 33 35 3D 40 42 42 3E 3F 3F 3F 3E 3E 3C 39
0x00012190 36 33 2E 2C 2E 29 2C 2D 30 30 32 32 30 2F 2D 31
0x000121A0 30 31 2D 2E 2D 2C 2B 28 29 28 27 2A 29 2C 29 2A
0x000121B0 2A 29 28 28 27 29 27 27 26 27 25 23 24 24 26 25
0x000121C0 25 23 23 21 22 22 22 22 20 20 21 1F 20 1F 1F 1F
0x000121D0 20 21 20 21 13 12 13 14 14 13 12 11 13 15 14 14
0x000121E0 13 14 16 14 14 15 14 14 16 16 17 17 17 17 18 18
0x000121F0 18 16 16 17 18 18 16 17 17 16 16 17 16 18 1A 1B
0x00012200 1A 1D 1C 1D 1E 1C 1F 1E 1F 21 1F 1F 20 22 25 31
0x00012210 3C 4D 54 56 4E 45 3B 34 2B 26 1E 1B 17 18 18 1B
0x00012220 1A 1D 1B 1E 1F 21 22 21 21 21 21 20 21 21 22 25
0x00012230 26 2D 33 3C 44 4B 57 5F 67 6B 68 6A 6E 6C 6C 6D
0x00012240 6C 6A 64 5E 5F 5B 5A 4E 4C 4A 48 44 40 3A 38 3A
0x00012250 3E 3C 3E 42 3F 41 3D 3C 3D 3F 44 46 4A 50 52 53
0x00012260 4F 4D 4E 4D 4E 50 4C 52 4D 4C 4B 4A 48 4C 49 4A
0x00012270 4A 51 52 5C 62 60 5C 5E 5A 57 4F 48 47 43 45 42
0x00012280 44 42 41 43 42 45 45 44 49 52 58 58 59 59 5B 5A
0x00012290 58 50 47 43 40 3D 3D 3E 3E 3C 3A 3D 3D 3E 3D 42
0x000122A0 47 4D 4E 4E 4C 49 46 40 3A 38 34 36 33 32 32 33
0x000122B0 34 32 33 33 39 3D 45 47 47 4B 47 44 41 3C 35 34
0x000122C0 30 31 2F 30 2F 31 31 36 38 3E 42 42 40 3D 3A 3B
0x000122D0 39 3B 38 38 33 30 2E 2A 2B 2A 2D 2D 2D 2C 2C 2D
0x000122E0 2C 2F 2D 2C 2B 2C 2A 2A 2B 27 28 28 28 27 28 27
0x000122F0 27 27 28 27 28 27 27 26 24 26 24 22 25 25 22 22
0x00012300 24 23 24 24 22 22 24 22 22 21 22 21 21 20 1E 1E
0x00012310 1E 1F 1F 20 21 21 21 1F 12 12 13 13 13 12 12 13
0x00012320 14 14 14 13 13 15 15 14 16 15 16 15 16 15 17 16
0x00012330 17 16 16 17 17 18 17 18 16 17 17 18 17 15 16 16
0x00012340 16 17 18 17 18 1A 1B 1C 1B 1D 1C 1D 1F 1F 1F 20
0x00012350 21 23 26 33 4B 60 6B 65 53 43 38 2C 27 21 1B 17
0x00012360 17 16 18 1A 1C 1B 1B 1B 20 21 1F 21 1F 1F 1F 20
0x00012370 20 20 22 25 24 29 2E 32 3D 48 54 5B 65 69 6B 69
0x00012380 6B 6A 6B 6E 6B 6A 68 63 67 66 5D 57 52 52 4F 4B
0x00012390 44 3B 36 38 3B 3D 3F 3E 3F 42 3E 40 3B 3C 42 45
0x000123A0 4D 53 56 54 52 51 50 4D 4A 48 49 46 48 45 45 44
0x000123B0 46 44 46 44 45 48 50 57 5C 5A 58 5A 59 56 4C 45
0x000123C0 44 3E 3E 3D 3C 3F 3D 3F 3E 41 40 40 46 4E 52 58
0x000123D0 56 56 56 57 55 4A 44 3E 3D 3B 3C 39 3A 3A 3A 3A
0x000123E0 3A 3C 3A 3F 46 4B 4E 4F 4D 48 43 3E 3A 36 36 34
0x000123F0 33 32 32 33 32 32 33 34 3A 3B 44 47 48 47 45 46
0x00012400 42 3D 35 33 33 31 2F 2E 2F 30 2E 30 36 38 3C 3C
0x00012410 3C 3A 36 38 33 31 32 32 31 30 2D 29 2A 29 2A 2A
0x00012420 2B 2B 2B 2E 2A 29 2B 29 2A 2A 28 29 29 27 28 27
0x00012430 27 27 25 28 28 26 28 26 27 26 26 26 27 26 25 24
0x00012440 23 22 22 23 22 21 23 26 24 24 24 22 23 25 25 23
0x00012450 23 22 20 1F 1C 1F 1F 21 22 23 21 1F 11 11 13 13
0x00012460 12 12 13 13 14 14 14 14 13 14 14 14 13 16 16 16
0x00012470 17 17 15 16 16 17 17 17 17 17 17 17 17 17 16 17
0x00012480 16 16 17 16 16 15 15 17 16 18 18 19 1A 1B 1C 1C
0x00012490 1C 1C 1D 1F 1E 21 28 3A 6E C9 CC 8C 55 42 34 2C
0x000124A0 25 1E 19 15 16 16 17 1A 1A 1A 1B 1A 1F 1F 20 20
0x000124B0 1E 1E 1F 1E 1F 1F 20 21 23 27 2A 2F 3A 43 52 5A
0x000124C0 63 64 6A 6B 6B 6A 6C 6D 6D 6D 69 68 68 6A 68 5E
0x000124D0 57 59 56 50 48 3C 36 36 38 39 3C 3E 3D 40 41 3F
0x000124E0 3E 3E 42 46 52 58 58 58 55 52 4E 4B 47 43 43 42
0x000124F0 42 40 3E 3E 3D 3F 3F 3D 44 47 4D 56 58 55 55 56
0x00012500 51 53 4C 40 3D 39 39 3B 3A 39 38 3B 3B 3A 3B 3F
0x00012510 47 4A 50 54 54 57 56 57 54 4C 45 40 3C 3C 3A 3A
0x00012520 3D 39 3A 3A 3C 3E 3C 3F 46 49 4A 53 4D 4B 47 42
0x00012530 3C 36 37 34 35 33 34 33 34 31 32 34 34 3B 3E 42
0x00012540 45 47 44 41 3D 3A 35 35 30 2F 31 2D 2F 2F 2F 2F
0x00012550 32 34 35 36 33 33 32 30 2F 2D 2E 2D 2C 2B 2B 2A
0x00012560 28 28 29 2A 28 27 29 28 26 2B 2A 27 28 28 27 28
0x00012570 27 25 26 23 26 24 26 25 26 27 26 28 28 29 29 28
0x00012580 28 27 29 26 24 23 21 21 21 24 24 27 28 26 26 24
0x00012590 25 24 25 23 23 21 1E 1D 1E 1F 1F 21 23 22 22 1F
0x000125A0 11 13 13 13 12 12 13 14 13 13 15 14 14 13 14 15
0x000125B0 13 15 14 16 16 16 17 15 16 16 16 17 17 16 17 17
0x000125C0 17 17 17 16 17 16 16 16 16 17 16 17 17 16 18 17
0x000125D0 19 19 19 1A 1A 1C 1E 1E 1F 22 27 38 67 CE CA 83
0x000125E0 52 3B 31 28 20 1C 16 15 16 16 17 19 1B 1A 1C 1C
0x000125F0 1D 1C 1D 1D 1D 1C 1E 1F 1E 1E 1F 1F 21 25 28 2B
0x00012600 33 40 4A 54 5E 67 68 68 6A 69 6A 69 68 68 67 6A
0x00012610 6B 6E 68 61 5F 5A 58 54 49 3C 39 34 34 35 36 3D
0x00012620 3E 3F 42 3F 3F 3F 42 46 4F 59 58 59 53 50 4C 47
0x00012630 43 3E 3E 3E 3C 3E 3A 3C 3B 37 38 3C 3D 46 4A 52
0x00012640 57 56 54 52 52 50 49 44 3C 38 39 3A 39 3A 3B 3A
0x00012650 3A 39 3A 3C 42 4A 53 55 52 54 55 52 51 4A 44 3D
0x00012660 3B 3A 3B 3B 3C 3B 39 39 39 3B 3B 3D 46 47 4A 4B
0x00012670 4A 46 43 40 3B 39 34 33 33 32 32 32 32 33 32 32
0x00012680 33 34 38 3C 3C 3E 3C 3A 38 36 32 30 30 2E 2F 2E
0x00012690 2D 2A 2D 2E 2D 31 30 2F 2C 2C 2F 2D 2D 2A 2B 2B
0x000126A0 29 29 2A 27 28 29 27 2A 29 29 29 28 28 27 28 29
0x000126B0 28 28 28 26 27 25 25 22 23 23 25 25 28 2B 29 2B
0x000126C0 2D 2D 2D 2B 2D 2D 2C 2A 26 23 20 20 22 23 26 29
0x000126D0 2A 2A 27 25 22 22 23 24 23 23 1E 1D 1E 1D 1E 21
0x000126E0 22 23 1D 1D 12 12 13 13 13 13 13 13 14 13 14 13
0x000126F0 14 14 15 15 14 14 17 15 16 17 16 16 16 16 17 17
0x00012700 16 16 17 17 18 17 16 17 16 15 15 14 17 16 16 17
0x00012710 15 16 15 17 16 17 17 18 19 1A 1B 1D 1C 20 22 2F
0x00012720 51 8A 97 6D 4A 39 2E 25 20 1A 15 15 16 15 18 19
0x00012730 1A 18 18 1A 1B 1C 1E 1D 1A 1C 1E 1B 1E 1E 1E 1F
0x00012740 20 22 26 2A 2E 3A 47 52 59 64 69 67 65 69 67 67
0x00012750 69 69 6A 65 6A 69 66 61 5B 5D 56 4D 46 3C 36 34
0x00012760 34 35 34 39 3B 3D 3C 3D 3F 3F 42 46 4D 54 54 54
0x00012770 53 4D 4C 46 41 3F 3B 3D 3D 3C 3B 3C 3B 3A 3B 3D
0x00012780 40 42 48 4F 53 53 50 53 52 4E 47 43 3C 3B 39 3A
0x00012790 39 3B 38 38 38 3A 3B 41 40 45 4C 51 52 4E 50 50
0x000127A0 4E 4A 43 3E 3C 39 39 3A 39 3A 38 39 3A 39 3A 3A
0x000127B0 3F 42 44 45 43 41 3E 3D 38 34 32 33 31 31 2F 2F
0x000127C0 30 31 33 32 32 33 33 35 37 35 33 37 32 33 32 31
0x000127D0 2E 2E 2E 2C 2E 2C 2B 2B 2D 2D 2C 2E 2A 2B 2B 2B
0x000127E0 2C 2B 2B 29 29 27 26 27 27 26 28 27 29 29 2B 2A
0x000127F0 2A 2B 2C 2A 2A 2C 2C 2A 29 26 24 24 23 24 25 27
0x00012800 29 2D 32 32 30 30 2F 2F 30 2F 2E 2B 25 23 22 21
0x00012810 23 25 27 2B 2A 29 25 22 20 1F 22 21 24 23 1F 1E
0x00012820 1D 1D 1E 21 22 21 1F 1B 12 13 13 12 12 12 13 13
0x00012830 13 12 13 13 14 13 14 15 14 14 16 16 15 17 16 15
0x00012840 16 16 15 17 16 17 17 15 16 17 16 17 16 16 14 15
0x00012850 15 14 16 16 16 16 17 17 15 16 18 18 17 16 19 1A
0x00012860 1A 1D 22 2D 41 54 5B 4F 40 34 2B 21 1C 18 15 15
0x00012870 15 16 18 19 18 1A 1A 1B 1A 1B 1B 1B 1A 1B 1A 1A
0x00012880 1C 1D 1D 1E 1E 1F 23 27 2E 34 42 50 5C 65 65 67
0x00012890 67 69 68 66 69 67 66 66 6A 66 64 5B 59 54 51 4A
0x000128A0 41 3A 34 31 33 35 34 36 39 3C 3D 3D 3F 41 41 44
0x000128B0 47 49 4B 4B 4B 4D 49 46 42 3E 41 3D 3C 3C 3B 3C
0x000128C0 3C 3C 3E 3C 40 43 47 49 4D 50 4F 50 4A 47 44 3F
0x000128D0 3C 39 3A 3B 3A 39 3A 39 3B 3A 3D 3C 3E 42 46 47
0x000128E0 47 49 49 49 43 42 3E 39 3A 39 39 3B 36 3A 38 38
0x000128F0 39 37 36 38 39 3A 3C 3B 3C 3A 39 38 35 33 30 31
0x00012900 2F 30 31 30 2E 2E 30 30 30 30 31 32 31 32 33 32
0x00012910 30 31 31 2C 2C 29 2A 2C 2A 2A 29 2A 2D 2E 2D 2B
0x00012920 2C 2C 2F 2C 2E 2F 2C 2B 29 27 26 24 25 24 25 28
0x00012930 2A 2D 30 2E 30 31 2F 31 31 31 31 2F 2C 29 24 24
0x00012940 22 22 24 28 2B 30 31 33 2F 2F 2C 2E 2F 31 31 2C
0x00012950 27 23 22 21 21 25 27 29 27 26 22 1F 1E 1F 1F 22
0x00012960 24 23 20 1D 1D 1D 1E 22 20 20 1E 1B 12 13 12 13
0x00012970 12 12 13 12 13 14 12 12 14 14 14 14 15 14 15 14
0x00012980 16 17 16 15 14 16 17 17 16 15 15 17 18 16 15 16
0x00012990 14 14 14 15 15 16 16 15 14 16 15 15 16 16 15 16
0x000129A0 17 17 17 18 19 19 1E 27 35 47 48 43 3B 31 2B 21
0x000129B0 1A 16 14 14 14 16 18 19 18 19 1A 19 1A 1B 1A 18
0x000129C0 1A 18 19 1A 1B 1B 1A 1B 1C 1D 21 25 2A 33 44 4A
0x000129D0 57 60 64 67 67 68 66 6A 69 69 66 62 5F 5E 5A 56
0x000129E0 50 4A 48 42 3C 38 33 32 31 34 33 34 35 38 3A 3B
0x000129F0 3C 3D 3E 41 46 45 47 48 47 48 45 42 3F 3C 3E 3E
0x00012A00 3A 3C 3A 39 3A 3B 39 3C 3B 3E 41 43 46 48 48 48
0x00012A10 47 44 3C 3B 3B 38 38 39 39 35 36 36 35 39 39 39
0x00012A20 3B 3C 3E 3F 42 40 3F 3D 3E 3D 3A 38 36 37 35 36
0x00012A30 38 36 36 36 36 36 35 35 36 36 34 38 34 35 36 32
0x00012A40 34 30 32 2F 2D 2D 2F 2E 2C 2F 32 31 2E 33 31 31
0x00012A50 32 31 31 30 32 31 30 30 2C 2A 28 2A 2A 29 2B 2E
0x00012A60 2E 2F 2F 31 31 2F 2D 31 31 31 31 2F 2F 2C 28 22
0x00012A70 23 24 27 2A 2B 2F 30 32 33 32 33 32 32 33 34 34
0x00012A80 2F 2A 26 23 21 22 26 28 2C 30 31 2F 2C 29 28 27
0x00012A90 29 2C 2D 2D 29 26 22 22 21 24 25 27 26 23 20 1C
0x00012AA0 1C 1D 1F 21 24 24 22 1F 1C 1E 1E 1F 20 20 1D 1C
0x00012AB0 13 12 12 12 13 12 13 13 14 13 13 13 13 16 14 13
0x00012AC0 13 14 16 15 16 15 14 15 16 16 15 16 16 16 16 16
0x00012AD0 16 16 16 17 15 14 15 15 15 17 16 16 16 15 14 15
0x00012AE0 14 17 16 15 15 15 18 16 17 19 1D 24 32 3F 42 41
0x00012AF0 39 30 28 20 18 16 14 14 14 14 18 1A 1A 1A 18 1A
0x00012B00 1A 1A 1A 19 1A 19 18 19 19 1B 1A 1A 1D 1D 20 25
0x00012B10 29 35 41 4C 58 61 67 67 65 67 68 69 66 64 63 62
0x00012B20 5A 58 53 50 49 44 3E 3C 38 34 33 32 31 32 32 34
0x00012B30 32 37 3A 39 3C 3D 3E 42 43 3E 42 43 43 43 3E 3E
0x00012B40 3E 3B 3C 3B 38 39 3A 3A 3C 38 39 3A 37 3E 3B 3C
0x00012B50 41 40 41 40 3F 3E 3B 36 39 35 34 35 36 37 34 35
0x00012B60 36 36 39 3A 36 39 3C 39 3D 3C 39 3B 3A 3A 36 38
0x00012B70 34 38 34 36 34 34 35 33 34 35 35 35 39 34 36 32
0x00012B80 33 34 34 33 31 2F 2F 2C 2C 2B 2C 2C 2D 2F 2F 31
0x00012B90 31 35 33 33 33 33 34 34 35 37 32 32 2D 2B 28 27
0x00012BA0 28 28 2A 2F 33 34 38 36 38 33 31 33 34 36 35 34
0x00012BB0 2F 2C 2A 25 25 25 25 2A 2D 34 34 35 33 2F 30 2F
0x00012BC0 2D 2E 33 35 31 2D 29 24 22 22 25 28 2C 30 30 2D
0x00012BD0 29 23 21 23 24 28 27 2B 27 24 24 20 22 24 25 26
0x00012BE0 25 23 1F 1D 1B 1D 21 23 24 25 23 1D 1E 1F 1D 1F
0x00012BF0 21 21 1F 1C 12 11 11 12 12 13 12 13 13 13 13 13
0x00012C00 13 15 13 13 14 15 15 15 15 15 16 17 17 15 15 16
0x00012C10 17 17 16 16 17 16 15 16 14 15 14 15 16 15 16 17
0x00012C20 16 16 15 14 15 16 15 16 16 16 16 18 18 17 1B 22
0x00012C30 2D 3C 43 3F 3B 31 29 21 1A 15 15 16 15 16 17 18
0x00012C40 1A 18 1A 19 18 1A 19 18 17 19 19 19 19 1A 1A 1A
0x00012C50 1C 1C 1E 24 29 32 41 4C 59 62 64 66 67 63 66 64
0x00012C60 64 63 61 5D 54 50 4A 48 43 3D 3A 36 35 35 34 31
0x00012C70 31 32 33 31 33 34 36 39 39 3B 3B 3D 3D 3D 3E 40
0x00012C80 3D 3B 3C 3A 3A 39 35 3A 38 38 38 35 37 3B 38 3B
0x00012C90 38 3B 3A 3B 38 3A 3D 3A 38 38 36 35 34 34 36 33
0x00012CA0 35 36 34 36 36 34 36 38 36 37 38 34 38 39 3A 39
0x00012CB0 38 3A 38 34 34 32 33 34 33 32 33 35 35 37 38 3A
0x00012CC0 36 34 34 35 35 35 35 35 34 32 2D 2D 2B 2B 2B 2A
0x00012CD0 2B 2F 32 34 36 3A 3C 38 35 39 39 39 3A 3E 3B 36
0x00012CE0 32 2F 29 26 27 28 2B 31 32 3A 3A 38 36 31 30 2F
0x00012CF0 33 38 36 36 34 2E 28 28 25 25 28 2A 2E 31 36 34
0x00012D00 30 2D 29 26 27 2C 2F 31 31 2E 28 23 23 24 26 29
0x00012D10 2B 2C 2B 27 25 20 1E 1F 21 24 2A 29 28 23 20 20
0x00012D20 20 23 25 26 24 23 1F 1D 1C 1D 22 25 27 23 21 1F
0x00012D30 1E 1E 20 1F 21 22 20 1E 12 11 12 12 13 14 12 12
0x00012D40 13 14 12 11 13 14 12 13 14 14 15 14 14 15 16 16
0x00012D50 15 17 15 16 14 15 16 15 16 16 16 15 15 15 13 14
0x00012D60 14 17 16 15 14 16 13 16 16 17 15 16 16 16 16 17
0x00012D70 17 17 1A 20 2A 3A 3F 3C 3A 32 27 22 1A 16 15 16
0x00012D80 15 15 16 18 1A 1A 18 19 19 19 18 19 18 17 19 18
0x00012D90 19 1A 1B 1B 1B 1B 1F 25 2B 34 43 52 56 5F 62 63
0x00012DA0 63 65 64 60 5E 5C 59 53 4D 4C 45 42 3F 3E 36 35
0x00012DB0 34 32 33 30 2E 31 31 32 33 33 35 36 38 39 3B 3D
0x00012DC0 3C 3A 3B 39 3C 3A 3B 39 39 3A 36 35 33 36 34 34
0x00012DD0 37 36 3A 39 38 38 38 3A 36 37 35 38 36 35 35 35
0x00012DE0 32 33 33 2E 32 32 31 34 35 36 39 3A 3A 38 38 38
0x00012DF0 3A 38 39 3C 3C 39 39 36 33 31 2F 31 30 31 31 34
0x00012E00 38 39 3C 3D 3A 39 36 39 36 39 39 3A 3A 34 31 2C
0x00012E10 27 27 28 29 2C 2F 34 39 3C 3B 3C 3B 38 35 38 3B
0x00012E20 3F 40 3F 3C 38 2F 29 27 25 28 2B 30 37 3B 3B 37
0x00012E30 34 30 2E 2A 2F 30 33 38 33 2E 2A 26 21 23 25 2A
0x00012E40 2E 32 33 32 2D 29 23 21 24 27 2C 2F 30 2D 29 24
0x00012E50 22 25 25 2A 2A 2C 2B 28 20 1F 1E 1C 21 25 28 27
0x00012E60 27 22 21 22 22 21 24 27 26 24 20 1E 1D 1E 25 24
0x00012E70 25 25 23 1E 1D 1F 1F 1F 20 21 20 1E 13 12 11 11
0x00012E80 13 12 12 12 14 14 13 14 13 15 13 14 14 15 14 14
0x00012E90 15 16 15 15 16 16 16 15 15 17 16 17 16 15 15 15
0x00012EA0 13 14 15 14 16 16 15 15 15 15 15 15 14 15 16 16
0x00012EB0 15 16 16 16 15 16 19 20 2B 33 3E 3B 39 32 28 23
0x00012EC0 1A 16 15 16 15 17 17 18 1A 19 1A 19 19 1B 19 18
0x00012ED0 1A 19 19 18 18 1A 1B 1A 1B 1B 1F 24 29 35 49 58
0x00012EE0 5D 5E 63 63 62 5F 5E 58 55 55 51 4C 46 46 42 42
0x00012EF0 3F 3C 38 32 30 32 2F 2E 30 2F 2F 33 30 34 35 36
0x00012F00 3A 3A 3B 3A 3A 38 3A 3A 39 3A 3A 3C 39 36 32 33
0x00012F10 2F 33 33 33 31 34 39 39 3D 3A 3B 3A 3A 39 38 38
0x00012F20 38 38 39 36 34 34 32 2F 2F 30 2E 32 32 36 3B 3E
0x00012F30 3F 3D 3D 3C 3C 3C 3C 3D 3F 40 3E 39 35 30 2E 2D
0x00012F40 2E 30 31 35 3A 3F 3F 41 3D 3C 39 34 36 36 3D 3D
0x00012F50 3A 3A 35 2F 2A 28 27 29 2B 30 34 3A 3E 3E 3B 35
0x00012F60 35 33 33 38 3C 3F 3F 3B 37 32 2A 28 25 26 2A 2E
0x00012F70 35 39 36 35 32 2A 27 25 28 2C 31 32 32 2E 27 26
0x00012F80 25 23 27 29 2E 32 33 2E 2B 25 22 20 22 26 28 2E
0x00012F90 31 2F 2A 24 23 22 24 29 2B 2E 2A 26 21 1D 1E 1F
0x00012FA0 21 26 29 29 26 24 22 1F 21 23 26 27 27 25 21 20
0x00012FB0 1F 22 24 26 26 23 22 1E 1D 1D 1C 20 1E 21 21 1E
0x00012FC0 11 12 11 11 12 13 12 13 13 13 14 14 14 15 14 12
0x00012FD0 15 15 14 15 13 16 15 16 15 14 16 14 15 16 15 16
0x00012FE0 16 15 16 15 13 15 14 16 14 14 16 14 14 16 14 15
0x00012FF0 15 16 15 15 16 16 16 17 16 17 18 1D 26 33 3C 3C
0x00013000 38 32 2A 23 1C 17 15 14 15 16 15 18 18 19 1A 1B
0x00013010 1B 1B 1A 19 1B 1B 1B 19 1A 1B 1A 1C 1C 1C 20 26
0x00013020 2D 3A 4C 5E 5C 5F 63 63 62 5D 58 54 50 4D 4B 46
0x00013030 45 47 45 45 44 40 3A 36 37 34 34 2C 2E 2E 2E 31
0x00013040 31 32 38 3D 3E 42 41 3F 42 3E 3D 3D 3D 3D 3B 3B
0x00013050 3E 3A 36 32 2F 2E 2E 30 33 32 3C 3D 3F 42 3E 3F
0x00013060 3B 38 39 3A 3A 39 3C 3A 3A 34 2F 2F 2D 2C 2E 31
0x00013070 33 38 40 42 43 42 42 3D 3C 3D 3D 41 42 42 42 3E
0x00013080 36 30 2E 2A 2B 2E 31 36 3B 3E 44 40 3E 39 34 32
0x00013090 33 36 3C 3E 3F 3E 38 2E 2B 27 27 27 2B 2E 35 3C
0x000130A0 3C 3A 38 33 2E 2D 2C 2D 33 3D 3D 3B 36 30 2A 28
0x000130B0 26 28 2A 2E 33 35 34 31 2C 23 22 22 24 28 2B 31
0x000130C0 30 2D 29 25 25 23 27 2B 2D 30 32 2E 29 24 21 1F
0x000130D0 20 26 2A 2C 2F 2C 28 23 22 23 24 29 2A 2B 2D 28
0x000130E0 23 1F 1E 20 26 29 2B 2B 28 23 21 20 21 22 26 27
0x000130F0 29 27 25 24 22 24 24 26 24 22 20 1E 1D 1D 1D 1D
0x00013100 1D 20 1F 1E 12 12 10 12 12 12 12 13 12 13 13 14
0x00013110 14 14 13 14 14 14 15 14 14 16 16 15 15 14 14 17
0x00013120 16 16 16 16 16 16 14 13 14 15 13 14 17 15 13 16
0x00013130 14 16 14 15 16 14 15 16 16 15 16 16 16 17 17 1C
0x00013140 26 30 39 3B 38 34 2D 25 1D 18 15 14 16 17 16 17
0x00013150 16 18 19 19 1A 18 19 1A 1A 1A 1A 1C 1C 1D 1E 1D
0x00013160 22 21 25 29 2F 3A 4B 55 5A 5E 5E 5E 5E 5B 54 4C
0x00013170 4C 4B 50 4B 4B 4C 4A 49 48 44 40 40 3F 3A 38 32
0x00013180 2F 2E 2E 2F 30 33 39 3C 46 4B 4E 46 45 42 42 41
0x00013190 41 43 46 46 43 3E 35 33 2F 2D 2E 2E 2F 34 3B 40
0x000131A0 45 45 43 40 3C 3A 36 3A 39 3F 3D 3F 3C 36 32 2D
0x000131B0 2D 2D 2C 31 34 3A 44 48 47 46 3E 3B 39 3B 3B 3F
0x000131C0 41 45 46 3F 3A 32 2D 2C 2C 2B 2E 34 3B 40 45 41
0x000131D0 3D 35 2F 2C 2D 2F 35 3C 3F 3C 38 31 2A 27 26 28
0x000131E0 28 2F 34 38 3D 38 32 2D 28 25 23 27 2D 35 3A 39
0x000131F0 35 2F 2A 26 25 27 2B 2D 33 34 34 2E 27 21 1F 1E
0x00013200 20 25 2A 2E 2F 2E 2A 26 24 25 26 2A 2C 2F 31 2F
0x00013210 28 23 22 21 22 27 29 2E 2E 2C 29 24 21 23 24 27
0x00013220 29 2C 2C 27 24 23 23 25 28 2B 2B 2B 26 23 20 1E
0x00013230 20 21 23 28 27 27 27 25 24 26 25 25 23 21 1F 1D
0x00013240 1C 1B 1C 1D 1D 1B 1C 1C 11 12 12 11 13 13 11 13
0x00013250 12 12 13 13 14 13 15 13 13 14 15 15 16 16 16 16
0x00013260 15 16 16 14 15 15 16 15 16 15 16 14 13 15 14 15
0x00013270 16 16 15 15 15 16 13 14 14 16 16 15 15 16 16 16
0x00013280 15 16 17 1A 22 2E 38 3A 3A 35 2D 25 1F 18 16 15
0x00013290 15 14 17 15 15 17 17 19 19 1A 19 1C 1A 1C 1D 1E
0x000132A0 1D 1F 22 23 24 25 29 2D 31 3A 47 4F 57 5B 5C 5D
0x000132B0 5A 56 4E 4A 4A 4B 51 54 54 52 4E 4D 4B 4A 48 49
0x000132C0 4B 46 3D 36 30 2C 2F 30 2E 33 39 43 4C 52 53 4C
0x000132D0 48 43 40 41 42 45 4A 4A 4B 42 3C 34 2D 2E 2D 2B
0x000132E0 32 36 3E 47 4B 4C 44 3F 3A 32 33 35 35 3C 42 43
0x000132F0 3F 3A 31 2F 2C 2D 2E 2E 35 3E 43 46 49 43 3C 35
0x00013300 33 31 34 39 3E 44 44 42 3B 33 2D 2B 2C 2C 2F 34
0x00013310 38 3F 3F 3E 35 2E 29 26 27 28 2E 36 3A 3E 38 2F
0x00013320 2C 27 26 28 29 2E 33 39 38 34 2E 27 22 1F 1F 22
0x00013330 27 2F 34 38 33 2E 27 26 25 26 2A 2E 30 33 2F 2B
0x00013340 25 1F 1D 20 21 26 2B 2E 2F 30 29 27 24 24 27 29
0x00013350 2D 2F 31 2F 2A 25 23 22 27 27 2B 2B 2F 2C 27 25
0x00013360 23 22 24 26 28 2E 2E 2D 2A 29 26 27 2A 2C 2D 2B
0x00013370 27 23 21 1F 20 21 22 26 27 27 24 24 24 23 22 21
0x00013380 1F 1F 1D 1D 1B 1C 1B 1C 1C 1C 1A 1A 12 10 11 12
0x00013390 12 13 13 13 11 13 13 14 14 13 13 15 14 14 14 15
0x000133A0 14 14 15 16 16 15 16 17 14 15 15 14 16 16 14 14
0x000133B0 14 14 14 13 16 14 15 16 14 14 16 13 15 14 15 15
0x000133C0 15 16 14 16 14 15 16 19 1F 28 33 3C 3B 35 31 28
0x000133D0 23 1B 16 14 15 14 15 15 16 16 18 18 1B 1B 1A 1B
0x000133E0 1B 1B 1D 1E 22 22 24 27 28 2B 2E 30 38 3B 47 4F
0x000133F0 57 5A 5C 5C 59 56 4F 4C 4A 4F 57 56 54 53 4B 4A
0x00013400 46 44 4A 4B 4F 4C 43 39 31 2D 2D 2C 2E 33 3C 46
0x00013410 50 56 56 4D 46 41 3C 3A 3C 43 48 4C 4E 47 3E 35
0x00013420 2D 2B 2A 2F 31 36 3E 46 4C 4C 44 3B 33 2F 2C 2E
0x00013430 33 39 40 42 41 39 31 2C 2B 2B 2D 30 35 3B 44 46
0x00013440 43 3A 36 2E 2A 2A 2C 2F 38 3E 44 41 3B 31 2F 2A
0x00013450 2C 2A 2C 31 39 3D 3F 38 31 2A 23 20 1F 23 29 31
0x00013460 38 39 37 2E 2C 27 26 25 29 2D 32 35 36 34 2B 25
0x00013470 1F 1E 1C 20 27 2F 35 36 34 2D 29 26 24 26 28 2C
0x00013480 2D 31 30 2A 26 20 1E 1E 22 27 2B 2D 30 2C 2A 25
0x00013490 24 24 26 26 2A 2E 32 2F 2B 26 26 24 28 2A 2C 2F
0x000134A0 2D 2B 26 23 21 22 23 25 29 2C 30 2E 2C 29 2A 2A
0x000134B0 2D 2D 2E 27 24 23 1F 1F 21 20 23 24 24 25 23 23
0x000134C0 20 1F 20 1F 1D 1E 1C 1B 1B 1B 1A 1A 1A 1B 1A 17
--- frame ---
HM01B0 current mode 0
AE convergance(0x03) TargetMean 0x3E, ConvergeInTh 0x03, AEMean 0x42
[hm01b0_blocking_read_oneframe] +
[hm01b0_blocking_read_oneframe] - Byte Counts 79056
pip3 install Pillowpip3 install numpyThen type the following command to convert the raw image in the text file to a *.bmp image. Make sure to change the file name according to how it was saved on your computer.
language:bash
python3 raw2bmp.py -i raw_teraterm_log.txt
---frame---". Otherwise, the script will not save the image. Depending on the settings of your terminal window, you may need to adjust the settings to have the receiving LF characters converted to CR+LF pairs.In this case, head to Tera Term 's menu and clicking Setup > Terminal.... Set Receive: to LF from the drop down menu and click on the OK button.
If your file is formatted correctly , the raw2bmp.py will look for the raw hex values between the start (e.g. +++ frame +++ ) and end (e.g. --- frame --- ) frames. It will then take the raw values and save it in your working directory as a *.bmp file. For every start and end frame, an image will be generated and numbered.
Check out the folder and try opening the image. Below is an image of the Artemis Thing Plus in low lighting. If you have a generated image like the one below, we know that the camera is working!
Here are a few more images with the Himax HM01B0 taking pictures of objects at different distances. From left to right are pictures taken during the morning at SparkFun: a top view of a GPS board, a stuffed plush, part of a desk with the windows in the back, and an image of Bobby on a computer screen.


{kind=link}
Example: TensorFlow Person Detection
This example will test the Edge and camera to recognize a person. The expected behavior of this example will recognize a person based on a TensorFlow model. Depending on what is recognized, an associated LED will light up and an output will be displayed over the serial connection at 115200 baud.
If you've followed the previous example, you'll need to change your directory. In your Bash Shell, navigate to $AMB_ROOT/boards_sfe/edge/tensorflow_person_detection/gcc where the makefile for the gcc toolchain lives.
language:bash
cd $AMB_ROOT/boards_sfe/edge/examples/tensorflow_person_detection/gcc
Let's make sure that there is a nice area for make to work: enter make clean at the Bash prompt.
language:bash
make clean
Then type the following command into the Bash prompt with your COM port and baud rate. In this case, our COM port enumerated to COM10. Depending on your computer, this will probably be a different number.
language:bash
make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Now to flash your code to the SparkFun Edge. The process that unfolds should take you through compiling and linking the application, then begin uploading the code.
- Hold down button 14
- Press and release reset
- Hit Enter in your Bash shell to execute the command above
- Once the code has finished uploaded, release button 14
You should see something similar to the output below. The only difference is the COM port number. If you see the words "Upload complete!", you have successfully uploaded code to the SparkFun Edge!
language:bash
$AMB_ROOT\boards_sfe\edge\examples\tensorflow_person_detection\gcc> make clean
Makefile:103: warning: you have not defined COM_PORT. Assuming it is COM4
Makefile:107: warning: you have not defined PYTHON3. assuming it is accessible by 'python3'
Makefile:111: defaulting to 115200 baud for ASB
Makefile:115: defaulting to 921600 baud for SVL
Makefile:120: warning: you have not defined SDKPATH so will continue assuming that the SDK root is at ../../../../..
Makefile:128: warning: you have not defined COMMONPATH so will continue assuming that the COMMON root is at ../../../../common
Makefile:136: warning: you have not defined BOARDPATH so will continue assuming that the BOARD root is at ../../..
Makefile:144: warning: you have not defined PROJECTPATH so will continue assuming that the PROJECT root is at ..
Cleaning...
PS C:\Users\hocha\Documents\AmbiqSuiteSDK\boards_sfe\edge\examples\tensorflow_person_detection\gcc> make COM_PORT=COM10 bootload_asb ASB_UPLOAD_BAUD=921600
Makefile:107: warning: you have not defined PYTHON3. assuming it is accessible by 'python3'
Makefile:115: defaulting to 921600 baud for SVL
Makefile:120: warning: you have not defined SDKPATH so will continue assuming that the SDK root is at ../../../../..
Makefile:128: warning: you have not defined COMMONPATH so will continue assuming that the COMMON root is at ../../../../common
Makefile:136: warning: you have not defined BOARDPATH so will continue assuming that the BOARD root is at ../../..
Makefile:144: warning: you have not defined PROJECTPATH so will continue assuming that the PROJECT root is at ..
python3 ../../../../common/tools_sfe/ambiq/ambiq_bin2board.py --bin bin/person_detection.bin --load-address-blob 0x20000 --magic-num 0xCB -o bin/person_detection --version 0x0 --load-address-wired 0xC000 -i 6 --options 0x1 -b 921600 -port COM10 -r 2 -v
Header Size = 0x80
original app_size 0x47268 ( 291432 )
load_address 0xc000 ( 49152 )
app_size 0x47268 ( 291432 )
w0 = 0xcb0472e8
Security Value 0x10
w2 = 0x10008080
addrWord = 0xc000
versionKeyWord = 0x0
child0/feature = 0xffffffff
child1 = 0xffffffff
crc = 0x7006796b
Writing to file bin/person_detection_OTA_blob.bin
testing: bin/person_detection_OTA_blob.bin
Header Size = 0x60
app_size 0x472e8 ( 291560 )
Writing to file bin/person_detection_Wired_OTA_blob.bin
Image from 0x0 to 0x472e8 will be loaded at 0x20000
Connecting over serial port COM10...
Sending Hello.
Received response for Hello
Bootloader connected
Received Status
length = 0x58
version = 0x5
Max Storage = 0x4ffa0
Status = 0x2
State = 0x7
AMInfo =
0x1
0xff2da3ff
0x55fff
0x1
0x4cd00005
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
0xffffffff
Sending OTA Descriptor = 0xfe000
Sending Update Command.
number of updates needed = 1
Sending block of size 0x47348 from 0x0 to 0x47348
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 8180
Sending Data Packet of length 5356
Sending Reset Command.
Tries = 0
Upload complete!
Once the code is uploaded, use your favorite serial terminal program to inspect the output (115200 baud).
Hit the reset button. Point the camera at a person and see if the Edge can recognize a person! You may see an output similar to the readings below. Here you can see how it did with recognizing a person. The first 10 scores listed was when there was a person standing a few feet in front of the camera. The person score was significantly higher than the no person score. The remaining scores listed was when the person left the viewing area. Upon inspection, the values for the no person score was higher some of the time. However, the Edge became a bit confused a few times and thought there was a person standing in front of the camera. The error probably is due to the fact that the small room had a lot of objects in view, there was low lighting, and samples used for the TensorFlow model.
language:bash
Person score: 236 No person score: 67
Person score: 236 No person score: 59
Person score: 215 No person score: 102
Person score: 232 No person score: 71
Person score: 204 No person score: 119
Person score: 241 No person score: 59
Person score: 249 No person score: 45
Person score: 242 No person score: 59
Person score: 247 No person score: 49
Person score: 225 No person score: 88
Person score: 176 No person score: 151
Person score: 217 No person score: 95
Person score: 225 No person score: 83
Person score: 163 No person score: 166
Person score: 222 No person score: 88
Person score: 203 No person score: 120
Person score: 214 No person score: 103
Person score: 197 No person score: 133
Person score: 153 No person score: 180
Person score: 151 No person score: 180
Person score: 121 No person score: 200
Person score: 178 No person score: 153
Person score: 208 No person score: 109
Person score: 218 No person score: 97
If you are using Tera Term, it should look similar to the following image.
Below is a table indicating what LED will light up depending on what is recognized.
| Detection Result | LED Color |
|---|---|
| Error | Red |
| Processing | Blue |
| Person Detected! | Green |
| No Person | Yellow |