SparkFun GPS Dead Reckoning NEO-M8U Hookup Guide
 bboyho,
bboyho,  Elias The Sparkiest
Elias The Sparkiest {kind=link}
What is Dead Reckoning?
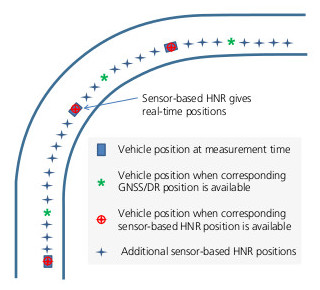
Dead Reckoning is the process of determining current position by combining previously determined positional data with speed and heading. This process can also be applied to determine future positions as well! The NEO-M8U uses what is called Untethered Dead Reckoning (UDR) which calculates speed and heading (amongst many other points of data) through the use of an internal inertial measurement unit (IMU). The addition of an IMU allows the M8U to produce more accurate readings in between GNSS data refreshes!
 |
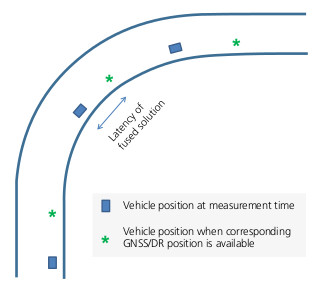 |
| Illustration of Using an IMU with GNSS Data | Illustration of Using only GNSS Data Only |
In addition, the module can also give accurate and useful GNSS data in areas where satellite connections are difficult to maintain: areas like the dense urban environments of major cities, long tunnels, parking garages, any large UFO's that may descend from the sky, etc.
