Getting Started with the RedBot
This Tutorial is Retired!
This tutorial covers concepts or technologies that are no longer current. It's still here for you to read and enjoy, but may not be as useful as our newest tutorials.
 SFUptownMaker
SFUptownMaker {kind=link}
Introduction
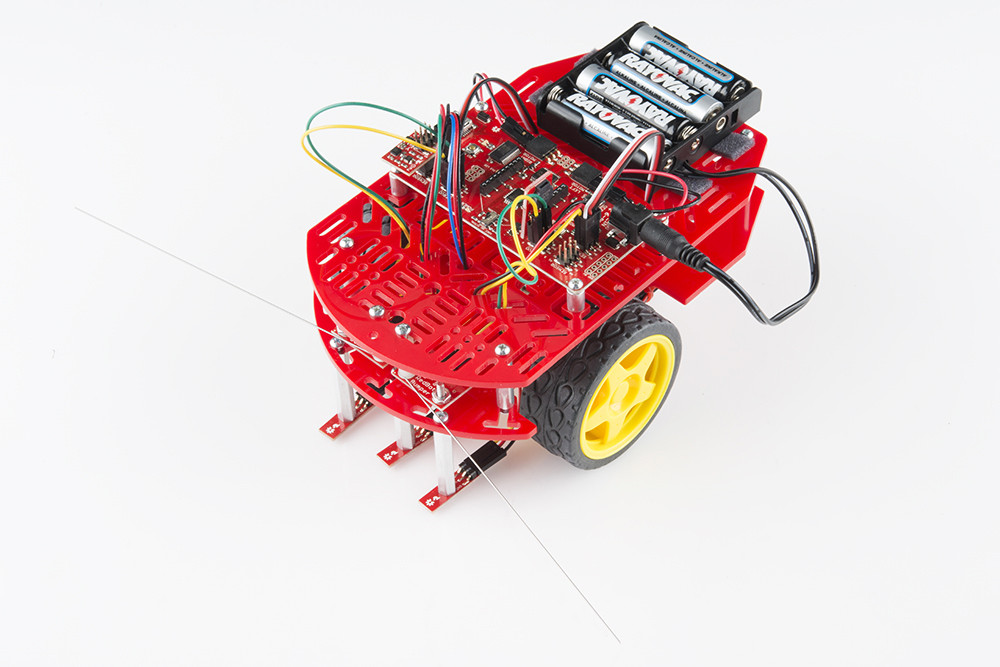
The RedBot is robotic development platform capable of teaching basic robotics and sensor integration! Based on the SparkFun RedBoard and programmable in the Arduino environment, the RedBot has all the I/O you need to make a small robot in no time at all. The RedBot family consists of the RedBot Mainboard (motor driver and main controller), sensor modules and add-ons, and The RedBot Kit.
We've also written a comprehensive Arduino library supporting the existing peripherals, which will be expanded to support additional peripherals as we add them. Once you've installed the library, you can program the RedBot using the "Arduino Uno" board option--no board definition files needed.
Suggested Reading
If you still need to assemble your RedBot, visit our RedBot Assembly Guide for detailed instructions.
Please Note: The RedBot Assembly Guide also includes instructions on how to hook up Dagu’s Wheel Encoder (not included in the RedBot Kit).
We also have a RedBot Experimental guide that will help you get your RedBot moving and doing cool things!
Before you go any further, you should probably make certain that you're familiar with these other topics:
- What is an Arduino? - Since the RedBot is based off the Arduino platform, it's a good idea to understand what that means.
- Installing the Arduino IDE - If you don't have the Arduino software installed, this guide will help you out.
- Installing an Arduino Library - To get the most out of the RedBot, you'll want to install our RedBot library. This tutorial will show you how.
- Accelerometer basics - One of the core sensors for the RedBot is an accelerometer. To find out more about accelerometers, check out this guide.
- Analog to digital conversion - Many useful sensors for the RedBot will be analog. This guide will help you interface with them and make the most of the data you get back.
- Pulse width modulation (PWM) - The RedBot includes two headers with PWM signals, and uses PWM to control the speed of the motors. It's probably a good idea to be familiar with the concept.
- I2C - The RedBot Accelerometer, which ships with the RedBot kit, uses I2C to communicate with the RedBot. While the accelerometer is accessible through the library with no knowledge of I2C required, if you want to get more out of it, you can check out this tutorial.
- Exploring XBees and XCTU - If you want to add remote controllability to the RedBot, XBees are the way to go. This tutorial will help show you how to set them up.