Red Box Robot Hookup Guide
 Nick Poole
Nick Poole {kind=link}
The Voice
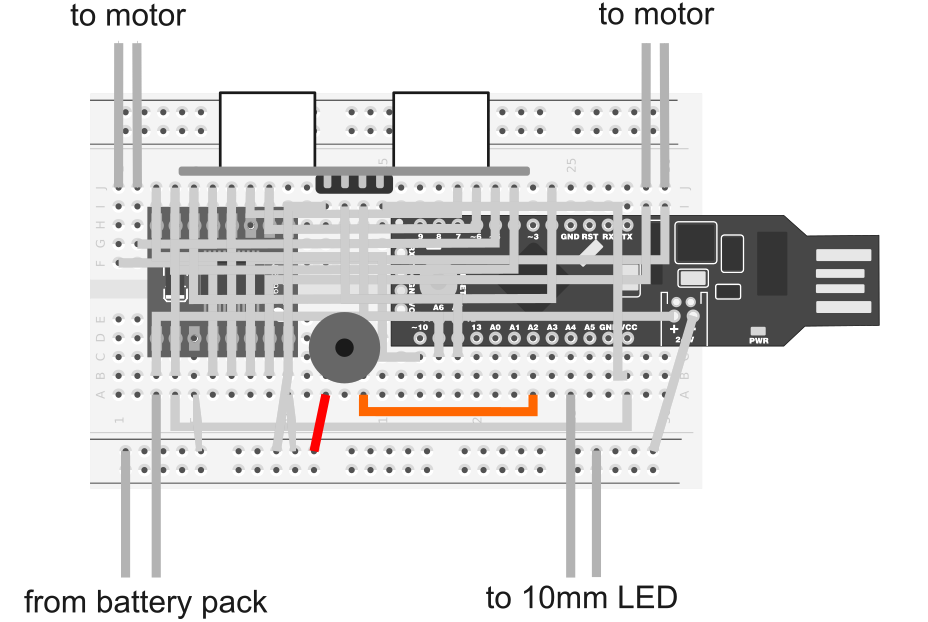
There's one more quick connection we'll need to make before your robot can whistle. Wire one side of the mini speaker to the A4 pin on the RedStick and wire the other side to ground as illustrated below.
The final update that we're going to make to our code today is to add a fun little function I call "Whistle," which picks nine random frequencies and beeps them out in quick succession to approximate a sort of wordless interjection. It doesn't sound like much, but it adds a lot of personality.
language:c
#include <SparkFun_TB6612.h>
// these constants are used to allow you to make your motor configuration
// line up with function names like forward. Value can be 1 or -1
const int offsetA = -1;
const int offsetB = -1;
// Pins for all inputs, keep in mind the PWM defines must be on PWM pins
// the default pins listed are the ones used on the Redbot (ROB-12097) with
// the exception of STBY which the Redbot controls with a physical switch
#define AIN1 2
#define BIN1 7
#define AIN2 4
#define BIN2 5
#define PWMA 10
#define PWMB 6
#define STBY 9
// Initializing motors. The library will allow you to initialize as many
// motors as you have memory for. If you are using functions like forward
// that take 2 motors as arguements you can either write new functions or
// call the function more than once.
Motor motor1 = Motor(AIN1, AIN2, PWMA, offsetA, STBY);
Motor motor2 = Motor(BIN1, BIN2, PWMB, offsetB, STBY);
// Pins
const int TRIG_PIN = 11;
const int ECHO_PIN = 12;
// Anything over 400 cm (23200 us pulse) is "out of range"
const unsigned int MAX_DIST = 23200;
void setup() {
// Setup all of our pins
pinMode(TRIG_PIN, OUTPUT);
digitalWrite(TRIG_PIN, LOW);
pinMode(2, OUTPUT); digitalWrite(2, LOW);
pinMode(4, OUTPUT); digitalWrite(4, LOW);
pinMode(5, OUTPUT); digitalWrite(5, LOW);
pinMode(7, OUTPUT); digitalWrite(7, LOW);
pinMode(3, OUTPUT);
pinMode(6, OUTPUT);
pinMode(A4, OUTPUT);
digitalWrite(A4, HIGH);
}
void loop() {
// Start moving forward
forward(motor1, motor2, 200);
unsigned long t1;
unsigned long t2;
unsigned long pulse_width;
float cm;
// Hold the trigger pin high for at least 10 us
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// Wait for pulse on echo pin
while ( digitalRead(ECHO_PIN) == 0 );
// Measure how long the echo pin was held high (pulse width)
// Note: the micros() counter will overflow after ~70 min
t1 = micros();
while ( digitalRead(ECHO_PIN) == 1);
t2 = micros();
pulse_width = t2 - t1;
// Calculate distance in centimeters.
cm = pulse_width / 58.0;
// If an obstacle is detected fewer than 20 centimeters away,
// run the motors backwards and then coin flip to decide which
// way to turn before continuing on.
if(cm<20){back(motor1, motor2, 250); whistle(); delay(1000);
if(flip()){left(motor1, motor2, 250);}else{right(motor1, motor2, 250);}
delay(2500);}
// Wait at least 60ms before next measurement
delay(60);
}
// Coinflip function that randomly returns a 1 or 0
bool flip(){
static uint32_t buf = 0;
static uint8_t idx = 0;
if (idx)
{
buf >>= 1;
idx--;
}
else
{
buf = random(); // refill
idx = 30;
}
return buf & 0x01;
}
// Make a series of cute random beeping sounds
int whistle(){
tone(A2,random(50,400)*10);
delay(100);
tone(A2,random(50,400)*10);
delay(100);
tone(A2,random(50,400)*10);
delay(100);
tone(A2,random(50,400)*10);
delay(100);
tone(A2,random(50,400)*10);
delay(100);
tone(A2,random(50,400)*10);
delay(100);
tone(A2,random(50,400)*10);
delay(100);
tone(A2,random(50,400)*10);
delay(100);
noTone(A2);
delay(100);
}
Assuming everything has gone well, your robot should be whistling an adorable little tune every time it encounters an obstacle. Consider it the Mouse Droid for your personal Death Star. Or perhaps it's the first recruit for your robot army. Or maybe it's just something to keep you company at home. Hey, whatever floats your boat, we're not judging.