Motors and Selecting the Right One
 CaseyTheRobot
CaseyTheRobot {kind=link}
Stepper Motors - Simply Precise
Stepper motors are great motors for position control. They can be found in desktop printers, plotters, 3d printers, CNC milling machines, and anything else requiring precise position control. Steppers are a special segment of brushless motors. They are purposely built for high-holding torque. This high-holding torque gives the user the ability to incrementally "step" to the next position. This results in a simple positioning system that doesn't require an encoder. This makes stepper motor controllers very simple to build and use.
The Anatomy of a Stepper Motor
To better understand how one works, let's start by tearing down a simple stepper motor. As you can see, these motors are built for direct drive loads containing a few key components.
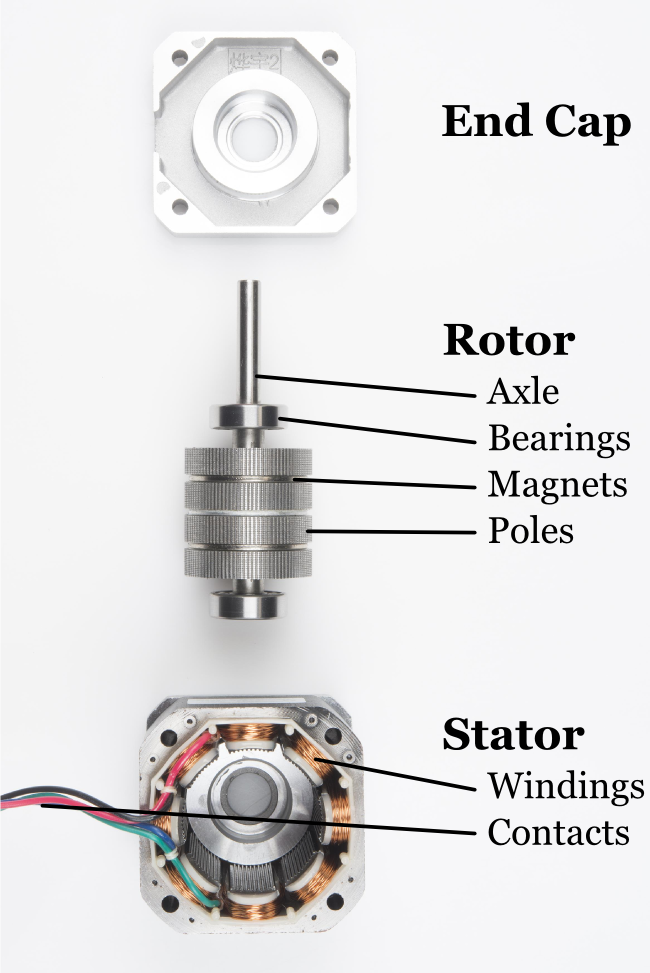
- Axle - Transfers the mechanical power of the motor to the user application
- Bearings - Minimizes friction for the axle
- Magnets - Provide a magnetic field for the windings to attract and repel
- Poles - Increases the resolution of the step distance by focusing the magnetic field
- Windings - Converts electricity to a magnetic field that drives the axle
- Contacts - Brings power from the controller to the windings
Theory of Operation
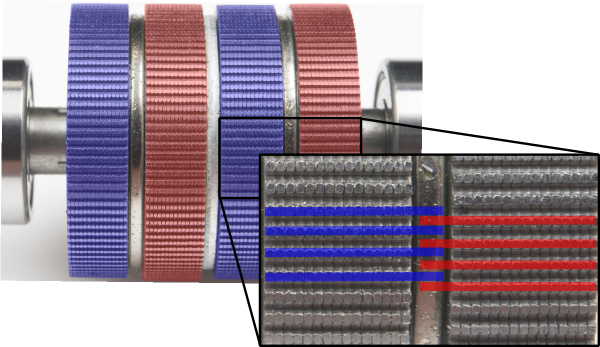
Stepper motors behave exactly the same as a brushless motor, only the step size is much smaller. The only moving part is the the rotor, which contains the magnets. Where things become complicated is orchestrating the sequence of energizing windings. The polarity of each winding is controlled by the direction of current flow. The animation demonstrates a simple pattern that controllers would follow. Alternating current changes the polarity, giving each winding a "push/pull" effect. A notable difference is how the magnet structure of a stepper is different. It is difficult to get an array of magnets to behave nicely on a small scale. It's also very expensive. To get around this, most stepper motors utilize a stacked plate method to direct the magnetic poles into "teeth".
In a brushless motor, back EMF is used to measure velocity. A stepper relies on the short throw of each winding to "guarantee" it reaches the desired point in time. In highspeed travel, this can lead to stalling where the rotor can't keep up with the sequence. There are ways around this, but they rely on a higher understanding of the relationship between motor windings and inductance.
Pros
- Excellent position accuracy
- High holding torque
- High reliability
- Most steppers come in standard sizes
Cons
- Small step distance limits top speed
- It's possible to "skip" steps with high loads
- Draws maximum current constantly