Getting Started with the AutoDriver
This Tutorial is Retired!
This tutorial covers concepts or technologies that are no longer current. It's still here for you to read and enjoy, but may not be as useful as our newest tutorials.
 SFUptownMaker
SFUptownMaker {kind=link}
Introduction
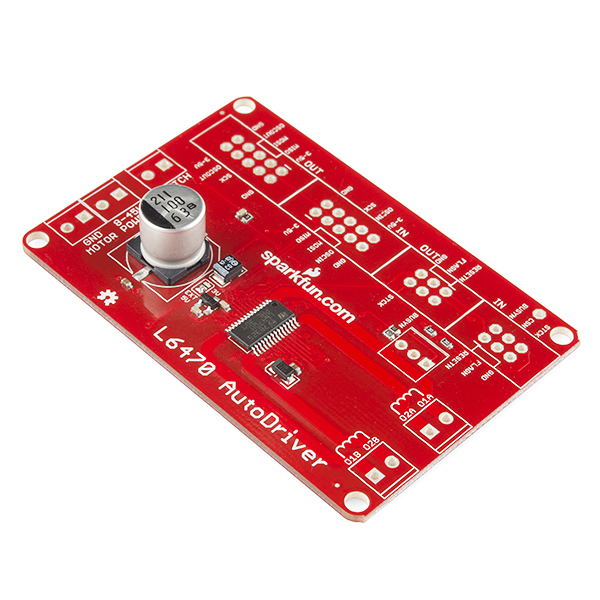
The AutoDriver board is based on the STMicro L6470 dSPIN stepper motor driver. This powerful chip allows you to control a stepper motor with a voltage from 8-45V at 3Arms over an SPI connection. Compared to traditional step/direction motor controllers, it offers a number of advantages:
- The L6470 tracks the current position of the motor, so the application level doesn't have to.
- "Fire-and-forget" motion control, which allows the application to continue working while the motor autonomously completes the desired motion.
- Acceleration and deceleration curves without complex software algorithms.
- Microstepping for extra smooth movements.
- Configurable currents for acceleration, deceleration, run, and hold, which give greater control to the user over power consumption.
- SPI interface, which allows for a greater number of motors to be driven from a single processor.
The primary disadvantage of the L6470 is that it requires a great deal more configuration and adds software complexity to your system. This hookup guide will attempt to relieve some of that difficulty.
Suggested Reading
Before you get started, you may want to look at these other tutorials to get you headed in the right direction:
- SPI - The Serial Peripheral Interface is the means by which the L6470 chip, and therefore the AutoDriver board, communicates with the system master CPU.
- Motors - Understanding stepper motors is important to driving them.
- Installing an Arduino Library - The AutoDriver has an Arduino library; if you don't already know how to install a new library, check out this tutorial to get you pointed in the right direction.