The SparkFun Servo Trigger is a useful little board that control hobby servo motors. It comes in both standard and continuous rotation flavors.
The Servo Trigger was designed to make using servo motors easy, but it may not fit every application. You might need different timing, or different logic that interprets how the input is translated into the motor drive signal. You might even have some idea that doesn't involve servo motors at all!
Since the heart of the Servo Trigger is a microcontroller, the firmware can be reprogrammed. And, because the design is released as Open Source Hardware, the source code is published in the device's GitHub Repository. You're welcome to download and modify it!
This guide applies to both versions of the Servo Trigger. They use identical hardware, but they get loaded with different firmware.
This guide will introduce the tools used to program the Servo Trigger and guide you through the software design. By the end, you'll be able to transmute a regular Servo Trigger into a Continuous Rotation one (or vice versa), or even develop new behaviors from scratch.
The Servo Trigger firmware was developed using Atmel Studio 6.2. Atmel Studio merges Microsoft's Visual Studio IDE with compiler and debugging tools targeting Atmel microcontrollers. The AVR tools use AVR-GCC, the same compiler used by the Arduino IDE.

The IDE communicates with the microcontroller using a programming dongle. The Servo Trigger was developed with the JTAGICE3 and AtmelICE PCBA debugging modules. These units can configure and program the chip and also offer a full-featured interactive debugger. You can pause execution and inspect the chip internals, which makes troubleshooting the application significantly simpler -- especially because the Tiny84 lacks a serial port that could print debugging information. If you're coming from platforms that don't offer it, interactive debugging is a very powerful technique.
If you're using Atmel Studio, the /firmware/ directory in the repo contains the solution (*.atsln) file.
The Atmel debug tools are very convenient, but they require detailed configuration to get working. This page will walk you through creating a brand new project and getting the debugger talking to the Servo trigger.
The Servo Trigger has the standard 6-pin in-system programming (ISP) connector.
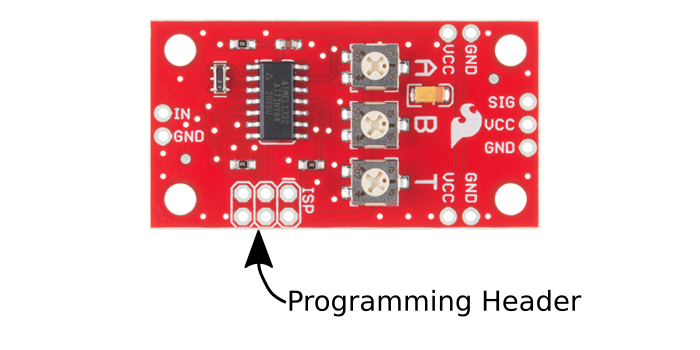
In order to connect to this header, you can solder a header to the PCB or use a pogo pin adapter.

Finally, the debug interface box isn't designed to serve as a power supply for the board. You'll need to power the Servo Trigger by applying 5 Volts to its VCC and GND pins.
In order to use the debugger, you'll need a project file. Let's create one from scratch.
To create a project, first open Atmel Studio, and select "New Project".

Select the GCC C or C++ Executable Project options.
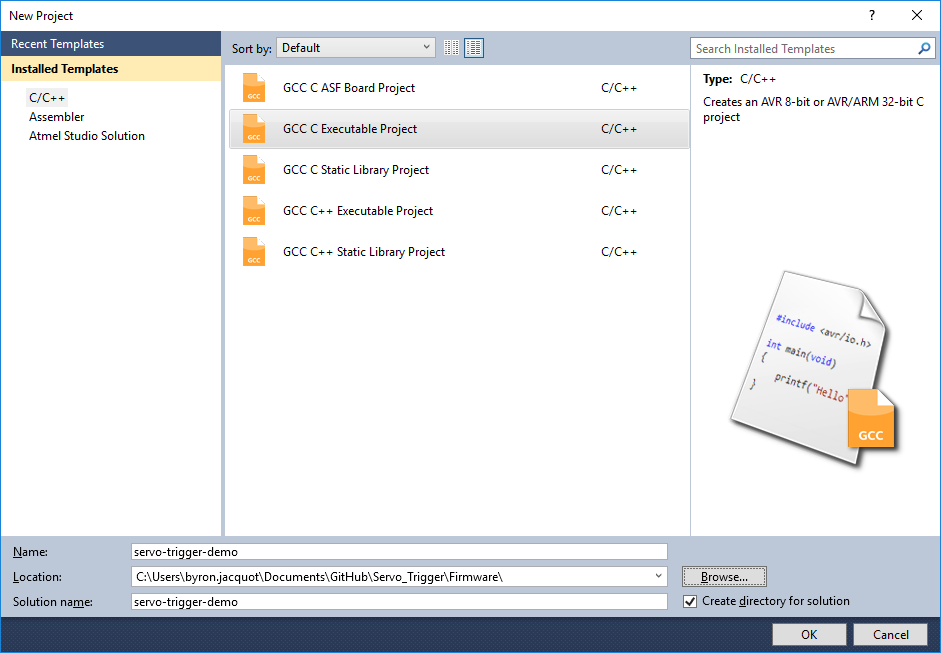
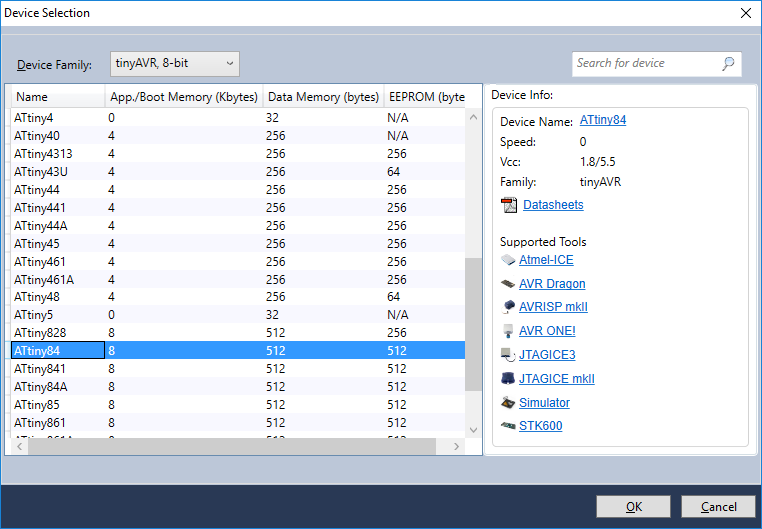
It will take a moment to initialize the project, then show a list of target microcontrollers. Select ATtiny84 from the list.
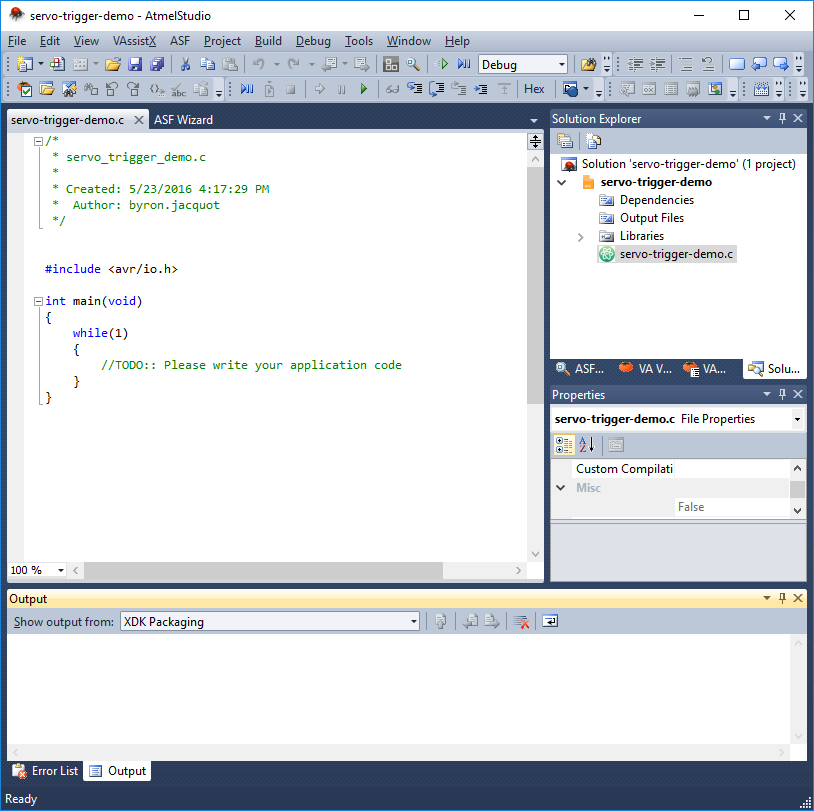
It takes another moment, then comes up with empty project. main() is the entry point for your application.
Before we go any deeper, lets take a quick break to explore the two modes that the debugger uses to communicate with the chip. While they appear to be similar, they aren't totally equivalent. They're also configured in two places in the IDE, and the settings need to match in order for them to function correctly.
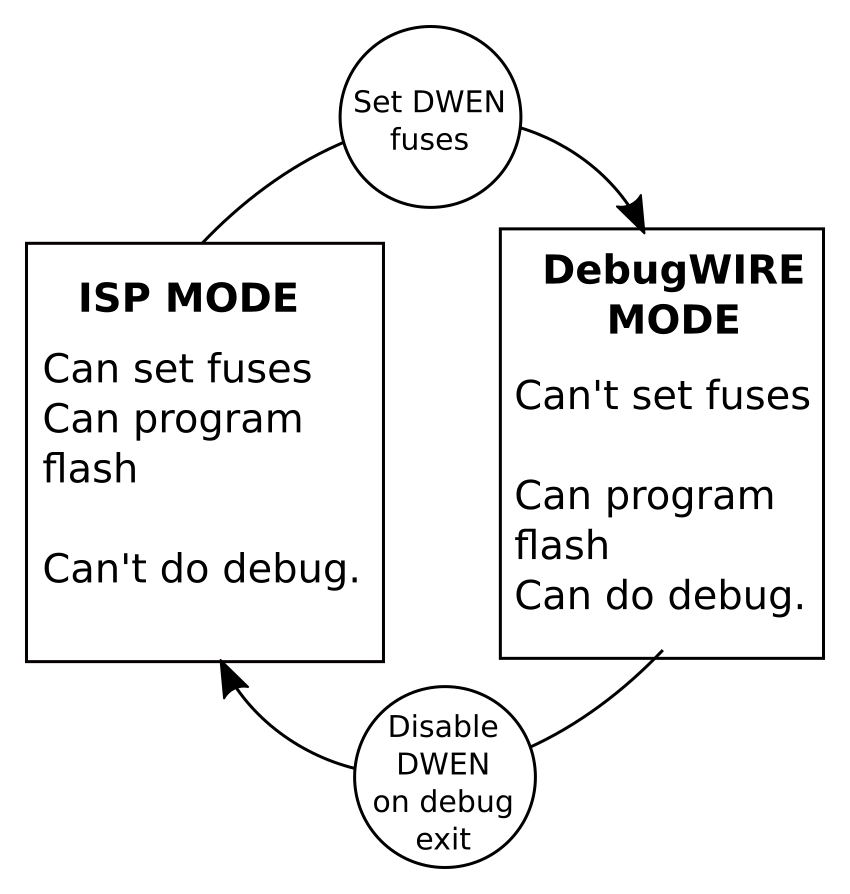
Since neither mode has all of the capabilities, we'll have to switch between them, depending on what we're doing. If you're having trouble using the features of one mode, the most likely problem is that the chip and IDE don't agree on the current mode.
With a new project open in the IDE, connect the debugger module to the USB port.
Click "Project->

Select the connected debugger, and set the interface to ISP.
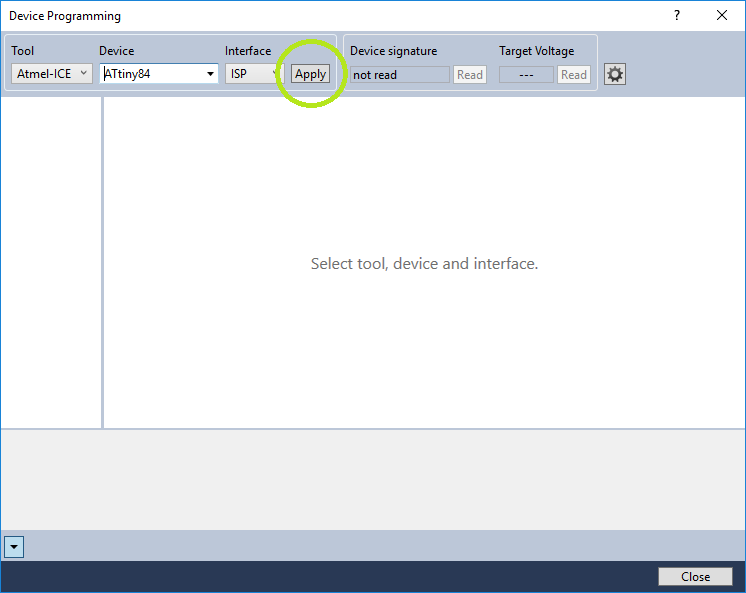
After selecting the interface, click on "tools->device programming" to open the chip configuration dialog. It will open with the tool, target device, and interface selected. Click Apply, and it initializes the interface. More information will appear in the lower portion of the window.
Connect the debugger unit to the servo trigger, and power it up. Click the "Target Voltage Read" button near the top right.
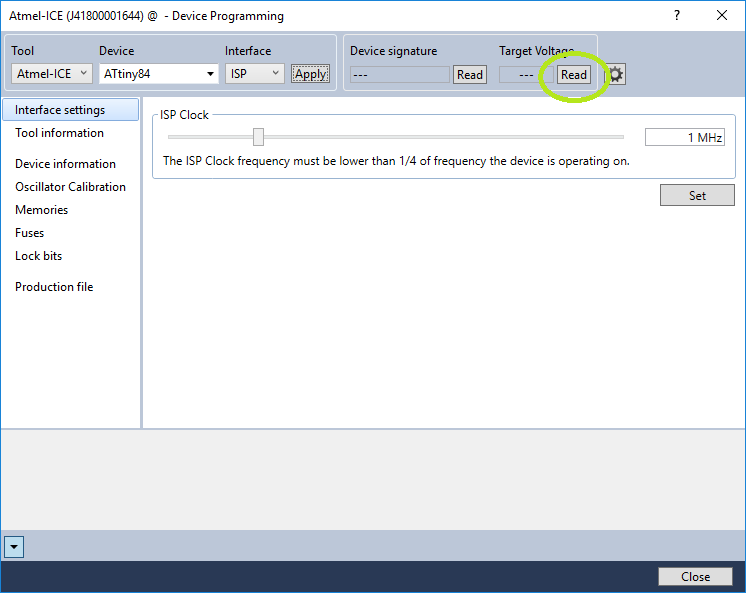
The neighboring box should indicate approximately 5.0V. This verifies that the chip has power and should be able to communicate.
Then, click the "Read device signature" button.
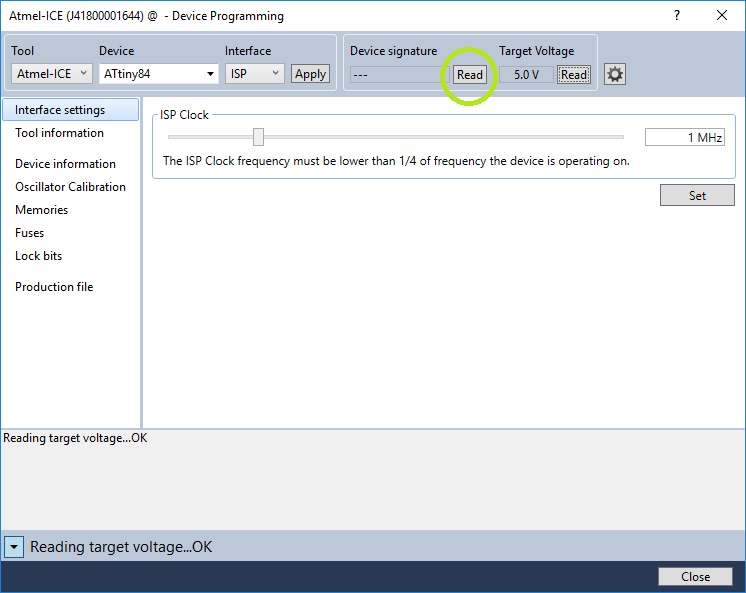
It should report an ID of 0x1E930C in the neighboring box, indicating an ATTiny84.
At this point, we've got confidence that the ISP interface is working, and we can turn on debugWIRE mode.
In the Device Programming dialog, click on the "Fuses" tab on the left side of the box. Then mark the box next to the "DWEN" (Debug Wire ENable) fuse. The circle next to the name will turn yellow, to indicate that the bit has not been programmed.
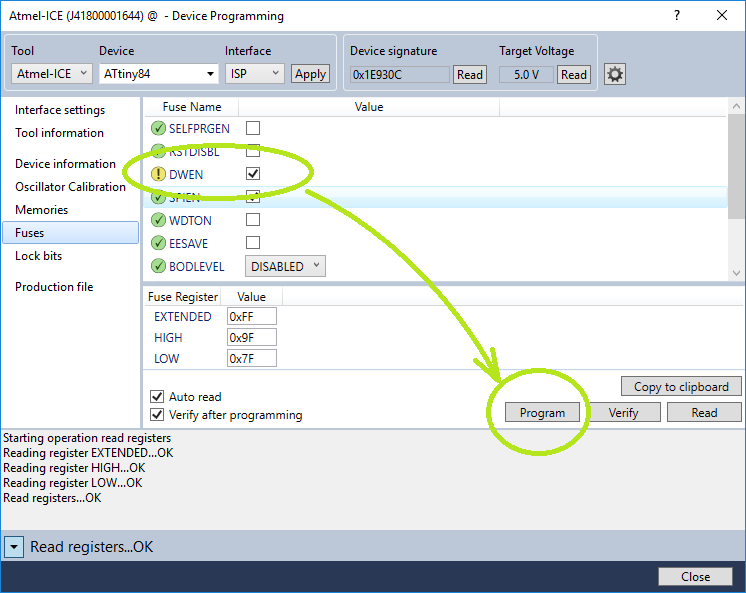
Make sure "Verify after programming" box is checked, then press "program." The progress will be reported in the lower portion of the dialog. If the IDE requests a power cycle of the target, do so. At the end, it should say "Verify registers ...OK", and the circle next to DWEN should turn green.
At this point, close the Device Programming dialog. You should be back at the project properties tab. Now, switch the interface to debugWIRE.
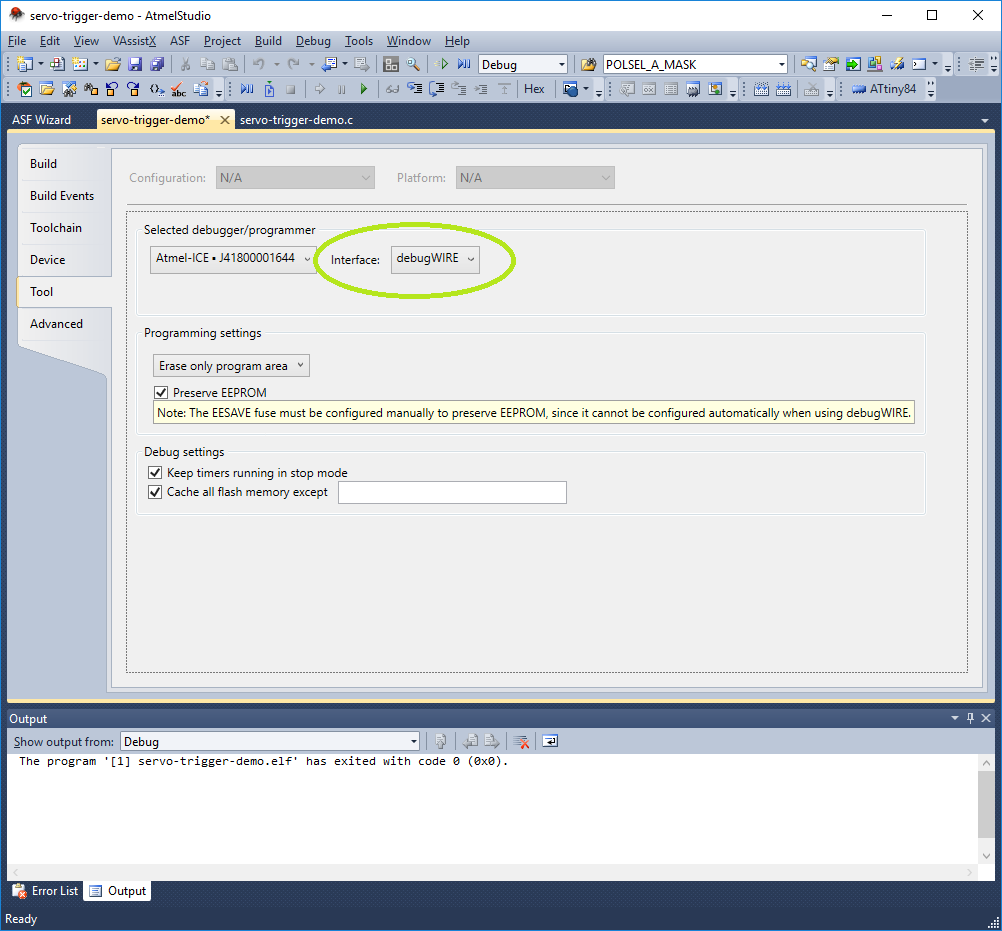
DebugWIRE has been enabled by setting the fuse on the chip, and the IDE has been instructed to use it instead of ISP.
After the steps above have been completed, select Debug->Start Debugging and Break.
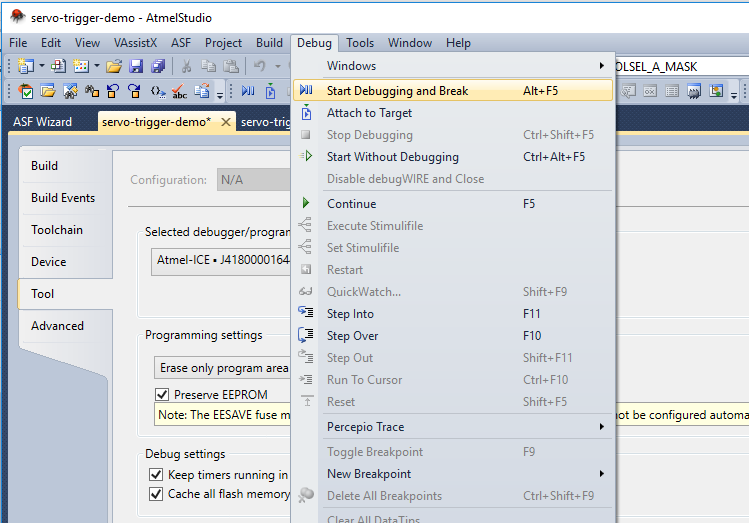
The compiler will run, and the IDE will rearrange its windows several times. Ultimately, it will open some memory inspection windows and the source code file.
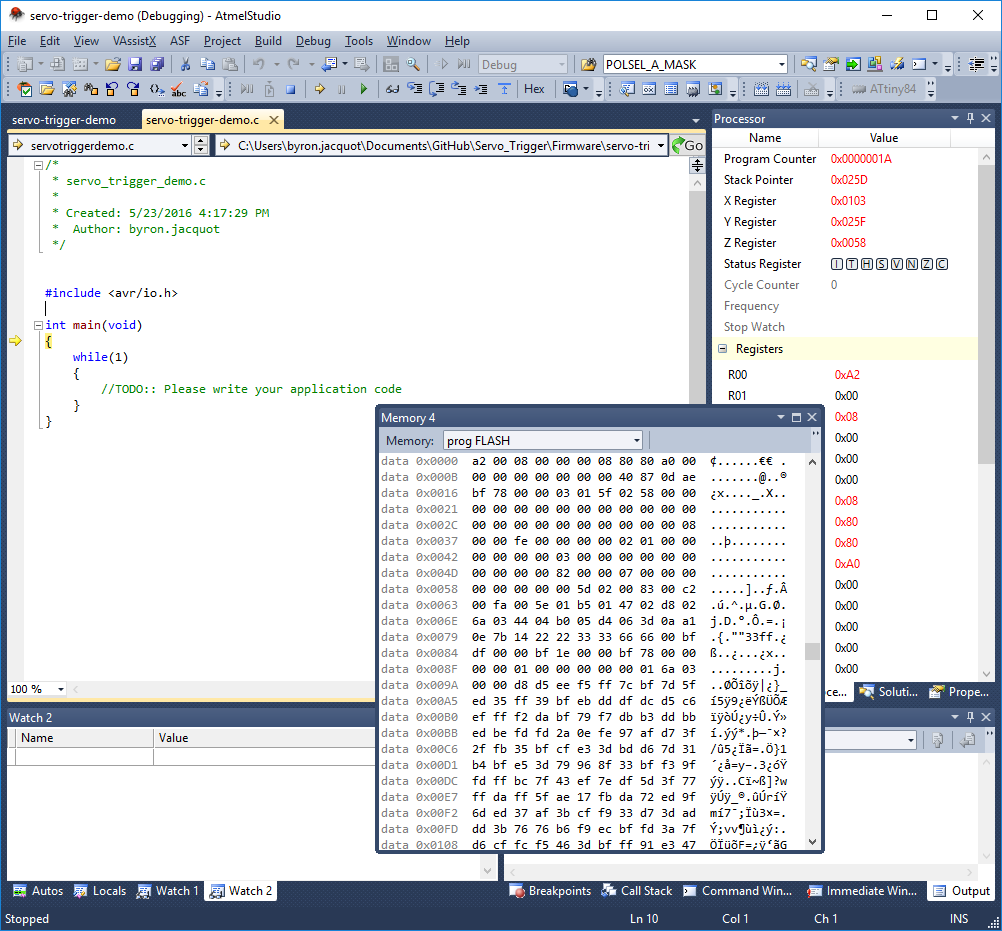
The yellow arrow in the left margin indicates that the debugger is running and has paused at the entry to main().
At this point, Atmel Studio performs like most debuggers. You can set breakpoints on specific lines of code, observe the call stack, inspect variables, and interact with the peripherals by accessing I/O registers in the memory map.
When you're done, select the "debug->stop debugging" option.
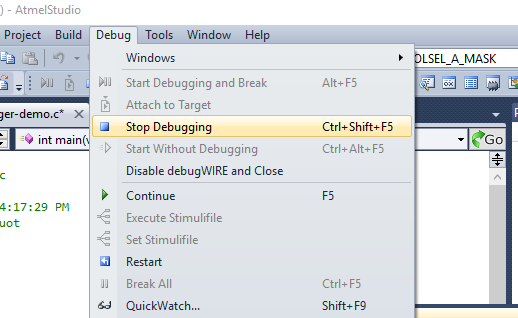
The program we've got in the default empty project is pretty trivial -- main contains an empty, infinite loop. If we were developing a more meaningful application, we would be adding more code to the source file, building and debugging as needed.
If you're making round trips from the editor to the debugger and back, stopping debugging is a reasonable way to switch modes.
If, however, you need to go back to the Device Programming dialog (for example, to change clock settings or adjust other fuse bits), you'll need to disable debugWIRE when ending the debug session.
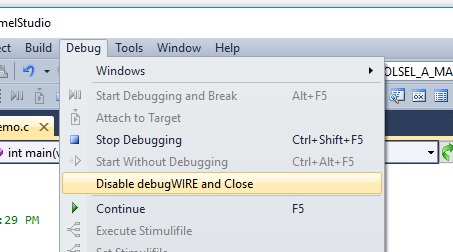
This clears the DWEN fuse. You can then return to the first time instructions above. Don't forget that the project configuration and device programming need to both be set to ISP. To return to debug mode, you'll need to set the DWEN fuse again.
It plays out like this: Yesterday you were debugging, today you start and decide to go and check the chip configuration in the Device Programming dialog.
Nothing works, and the error details contain "Got 0xc0, expected 0x00."
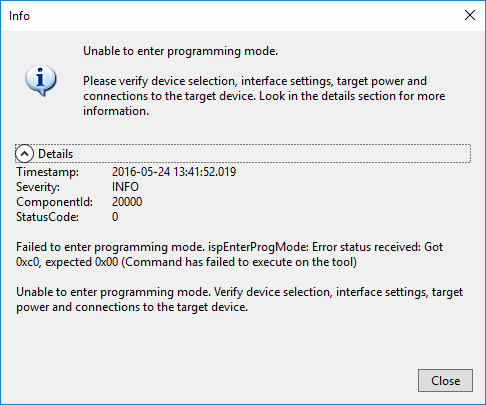
The trick to unjamming it:
Knowing the fundamentals of starting and stopping the debugger, lets look more closely at the Servo Trigger firmware design.
Let's take a look at some of the finer points of the Servo Trigger code.
There's a single source file in the project, ServoTrigger.c, and some additional configuration in the Atmel Studio project.
The range of transit times accessed by the T potentiometer is defined by a table of software values -- the table interprets pot position using an exponential curve, which allows for fine control of very short times on the low end, but still permits a useful longer range at the top. But perhaps these times don't fit your application especially well -- maybe you need extra resolution at the low end, or much longer times at the top end. You can change the timing table to do this.
In the GitHub repository, there is a speadsheet, translation.ods, which calculates the timing tables. Simply type the desired time in seconds into the green cells. The sheet recalculates the timing values, and updates the yellow cells. Cut and paste the yellow cells into the timelut array.
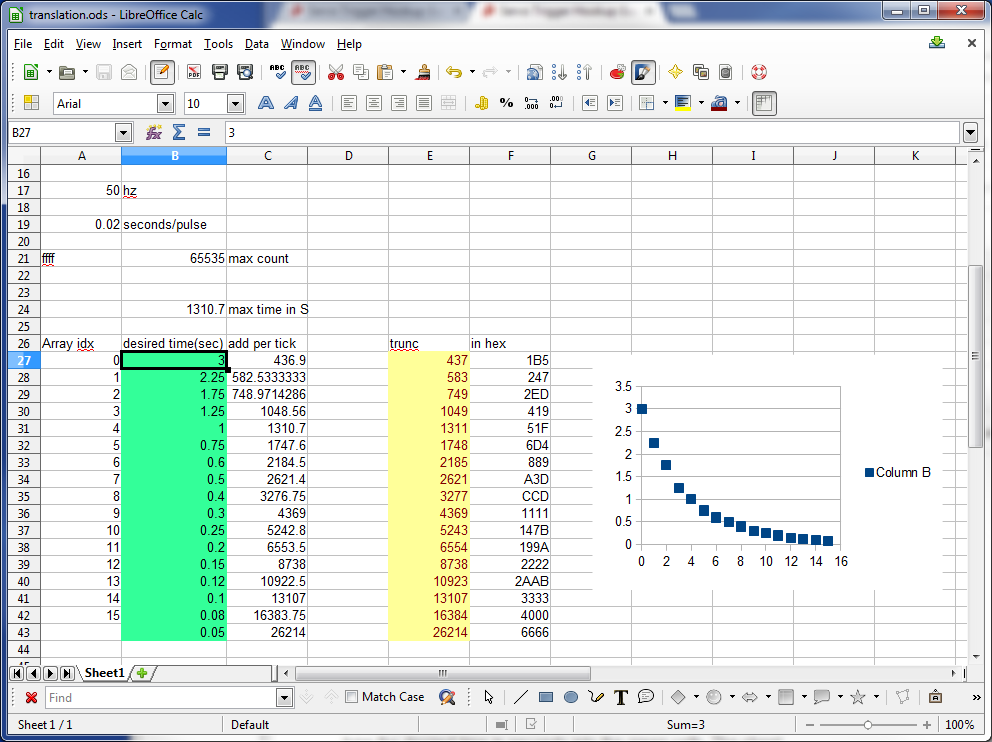
The table is only 17 entries long, which seems rather short -- but keep in mind we're using a microcontroller with only 8KB of flash memory and 512 Bytes of RAM -- we wouldn't want the timing table to fill the whole memory. To increase resolution between the table entries, the firmware performs linear interpolation to create more finely grained points in between.
The Servo Trigger comes with a couple of response modes that should be useful for most servo control needs, but, in the case they're not a good fit, they can be modified.
The two versions of the product (standard and continuous rotation) are managed with a different build configuration for each version. You can select the build configurations in the toolchain tab of the project settings. If all you're looking to do is transmute a regular Servo Trigger into a Continuous Rotation one (or vice versa), simply select the desired configuration.
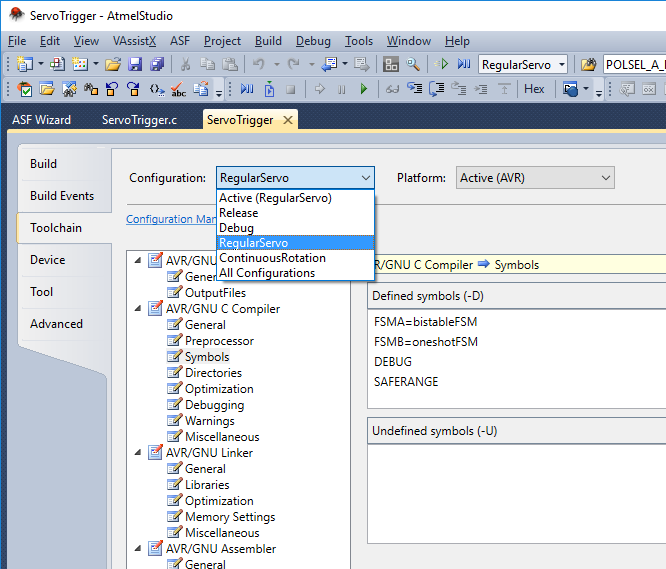
The modes are configured by defining symbols that get passed to the compiler. All of the modal variations are present in the same source code, enabled using macros. You can select which modes get loaded by changing the compile-time symbols in the project. In Atmel Studio, select the "Servo Trigger" tab, then navigate to "Toolchain-> AVR/GNU C Compiler->Symbols" item.
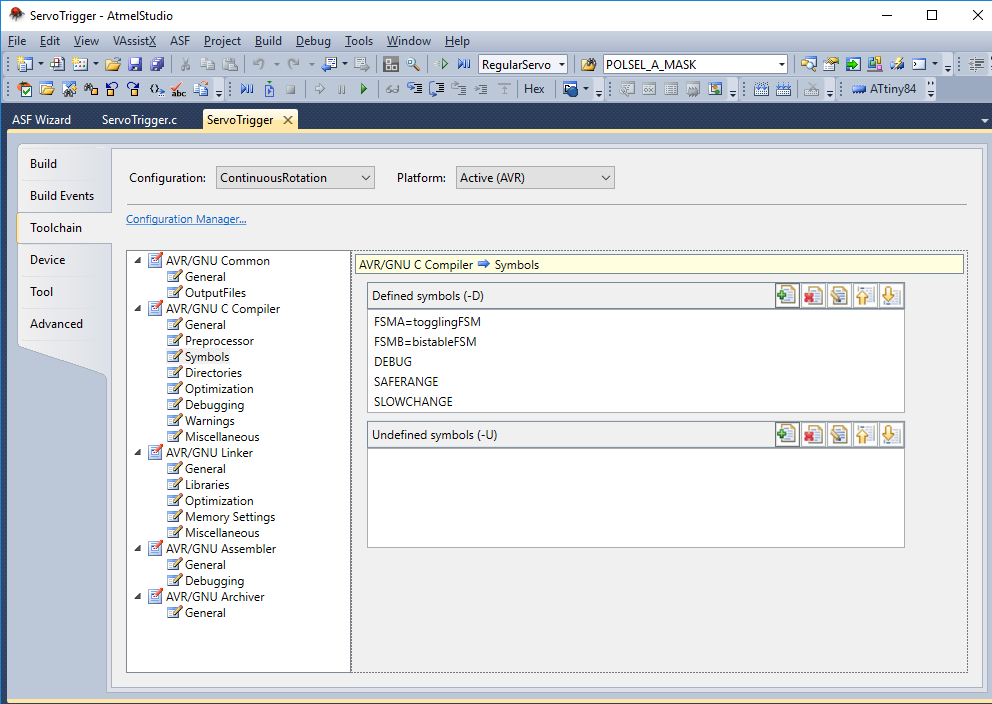
The FSMA and FSMB symbols determine which modes are programmed on the Servo Trigger. FSMA defines the unjumpered (default) mode, and FSMB defines the jumpered mode. There are five modes currently defined in the source file.
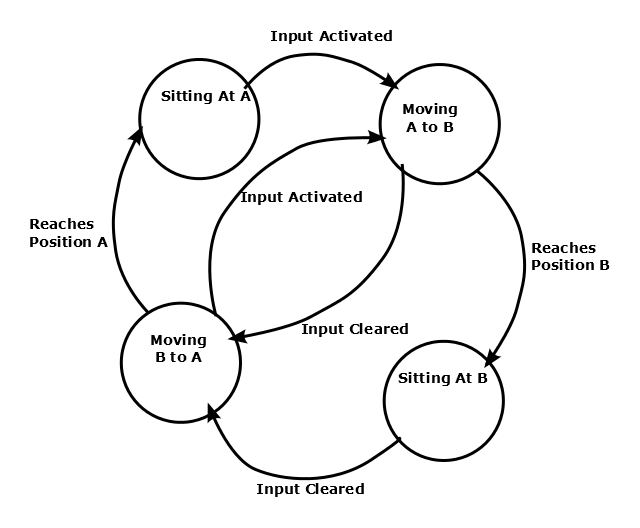
bistableFSM - The default mode - when the input is asserted, it moves from position A to B. While input is held, it will stay at B. When released, it moves back to A.oneshotFSM - Does a complete cycle every time the input is asserted - from A to B, then back to A.ctpFSM- A customization of the oneshotFSM for interactive artist Christopher T Palmer, which allows the B-to-A return cycle to be interrupted by a fresh input actuation.togglingFSM - Each time the input is asserted, it changes from A to B, or B to A. This mode is especially useful for driving continous rotation servos.astableFSM - When the input is asserted, it cycles back and forth between A and B. When the input is inactive, it sits where it was.You can put any mode in either slot, or even put the same mode in both.
As you may have guessed from the names, the modes are implemented using Finite State Machines. Finite state machines are a design concept the defines a set of states and a corresponding set of rules that determine how to transition between the states.
Within the Servo Trigger, each mode uses the same basic set of states, which in turn describe how it drives the servo. The states are:
The rules that define when the states can change can alter the behavior in significant ways. The different modes of the Servo Trigger are all implemented using the same states but with different transition rules.
FSMs are commonly illustrated using "bubble diagrams," which draw the states as circles and the rules as arrows between the circles. Here's the bubble diagram for the bistable FSM.
In the Servo Trigger, a state machine is implemented as a single function, which contains a switch statement wherein each state is a case. At the start of every PWM cycle, the state machine function is called to determine the pulse width and possibly move to new states.
If you want to implement a new state machine, it can be useful to start by drawing the bubble diagram.
If your new FSM is a slight alteration to an existing one, the next best place to look at the existing FSMs -- it might be as simple as transplanting a state transition rule from one function to another. If your FSM is more ambitious, it's still useful to read and understand how the FSM interacts with the rest of the firmware.
Your application may need a subtle variation of an existing FSM or a complete re-formulation. Since the source code is available, you're welcome to modify it to suit your needs!
The Servo Trigger can also be used as an ATTiny84 development board with three trimpots on it for any application you can dream up. Start with an empty project as described in the Getting Started section, and start programming at main()!
For more servo fun, check out these other SparkFun tutorials:
learn.sparkfun.com | CC BY-SA 3.0 | SparkFun Electronics | Niwot, Colorado
