RedBot Sensor - Wheel Encoder
This Tutorial is Retired!
This tutorial covers concepts or technologies that are no longer current. It's still here for you to read and enjoy, but may not be as useful as our newest tutorials.
 HelloTechie,
HelloTechie,  SFUptownMaker
SFUptownMaker {kind=link}
Introduction
RedBot Wheel Encoder
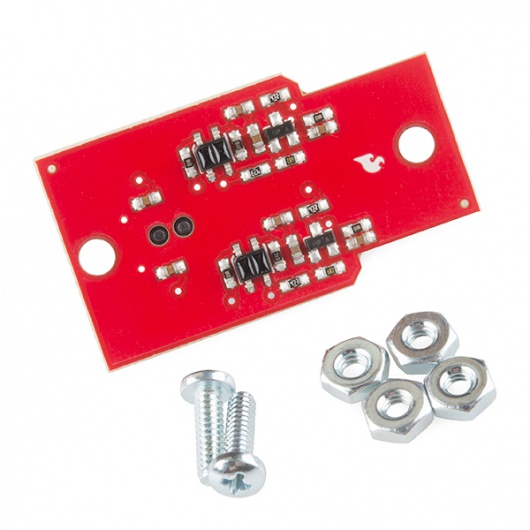
The Wheel Encoder board uses the same sort of infrared reflection sensors as the line sensors to watch a notched wheel attached to the axle spin. By counting the number of falling edges the sensor detects, you can determine how far the robot has traveled.
There should be 16 falling edges per full rotation of the wheel, and, since the wheel is about 2.5 inches (65mm) in diameter, that corresponds to about 8 inches or 200mm traveled per full revolution. Now, to forestall angry messages about conversions and precision of measurement (for instance, if you ask Google how many mm are in 2.5 inches, it'll tell you 63.5, not 65, and the circumference of a 2.5in diameter is certainly not exactly 8 inches), I invite you to consider this your first lesson in precision and tolerance. Given all the tolerances involved in this system, 8 inches/200mm per revolution is almost certainly a "good enough" answer, and if you need better than that, you'll need a more expensive robotics platform.