RedBot Sensor - Wheel Encoder
This Tutorial is Retired!
This tutorial covers concepts or technologies that are no longer current. It's still here for you to read and enjoy, but may not be as useful as our newest tutorials.
 HelloTechie,
HelloTechie,  SFUptownMaker
SFUptownMaker {kind=link}
Assembly
We will be placing screws that will later hold the RedBot Sensor - Wheel Encoder to the bottom chassis.
Locate the following:
- 1x Bottom Chassis Piece
- 2x 4-40 3/8" Phillips Screws
- 2x 4-40 Hex Nuts
Locate the two positions on the bottom chassis piece where the 4-40 screws will go. In this step, it doesn't matter what side you use, since both sides of the chassis are indential.
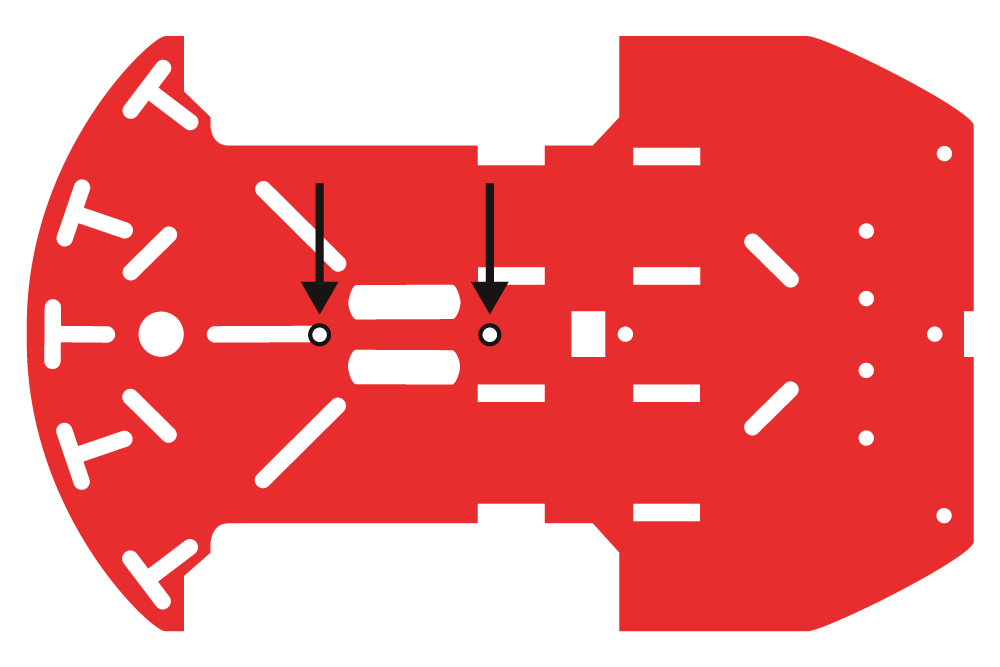
Place one of the 4-40 screw through the chassis piece in the correct location. This side of the chassis piece will now be your bottom side.

Tightly screw down the 4-40 hex nut on the top side of the chassis piece to hold the 4-40 screw down.

Place the second 4-40 screw and nut in the second located position on the chassis piece. You will want to place the 4-40 screw through the bottom side of the chassis. Then screw in the 4-40 nut on the top side of the chassis.

Adding RedBot Wheel Encoder
Locate the following:
- 1x RedBot Sensor - Wheel Encoder
- 2x 4-40 Hex Nuts
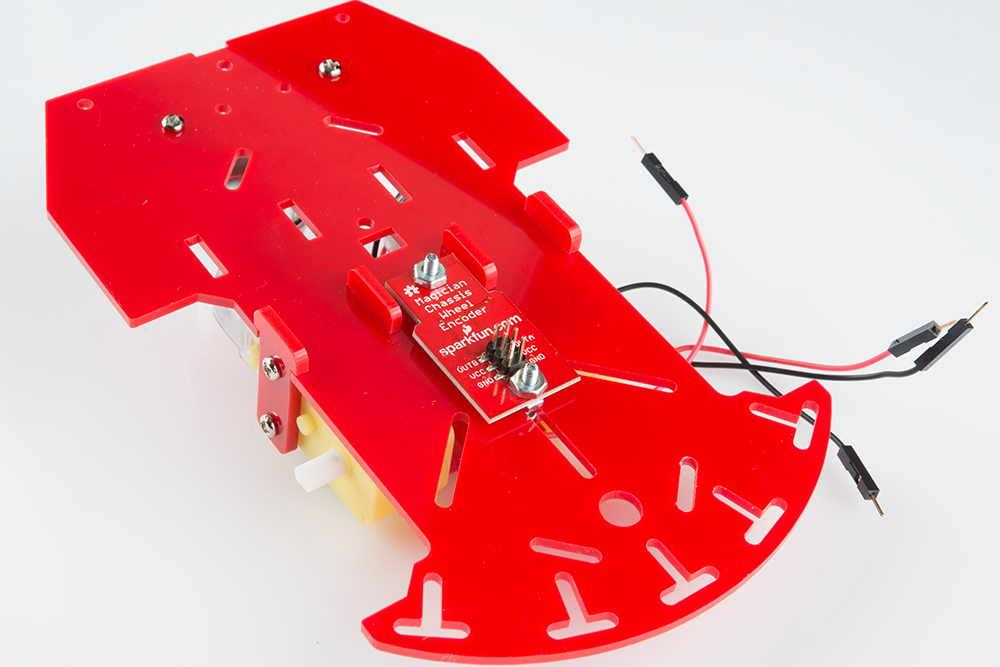
With the six pin male header side on the RedBot Sensor - Wheel Encoder facing upwards, place down the encoder on the top side of the bottom chassis piece where the 4-40 screw are. Pay close attention that the six pin male header side is also closest to the front side of the chassis. Using two 4-40 hex nuts, tighten down the RedBot Sensor - Wheel Encoder on the top side of the bottom chassis piece.
Connecting the Wheel Encoder the the RedBot Mainboard
Add four jumper wires to the RedBot Sensor - Wheel Encoder. There should be a jumper wire each one of the following pins: OUTB, OUTA, VCC, and GND. You can then connect the jumper wires to the following pins on the RedBot Mainboard.
SparkFun RedBot Sensor - Wheel Encoder → RedBot Mainboard
- OUTB → A2
- OUTA → 3
- VCC → 5V
- GND → GND