Red Hat Co.Lab Robotic hand kit curriculum guide
 Evan_Double_U
Evan_Double_U {kind=link}
Part 1: Creating a “Hand”
What does the hand do?
The human hand is a complex machine, made up of skin, bones, muscles, nerves, tendons, and ligaments. Our hands allow us to grip items in many ways and with various levels of power and dexterity. Replicating a hand is very hard to do because of its many components as well as its sense of touch. Imagine the differences between how you lift a pencil to write, how you might lift a heavy bag, and how you open a door. Each of these activities requires different motions, different fingers, and different levels of strength to accomplish the task. As part of the experiment, we’ll focus on how we can replicate the gripping motion of just a few fingers with a circuit and cardboard box.
How can we replicate a hand?
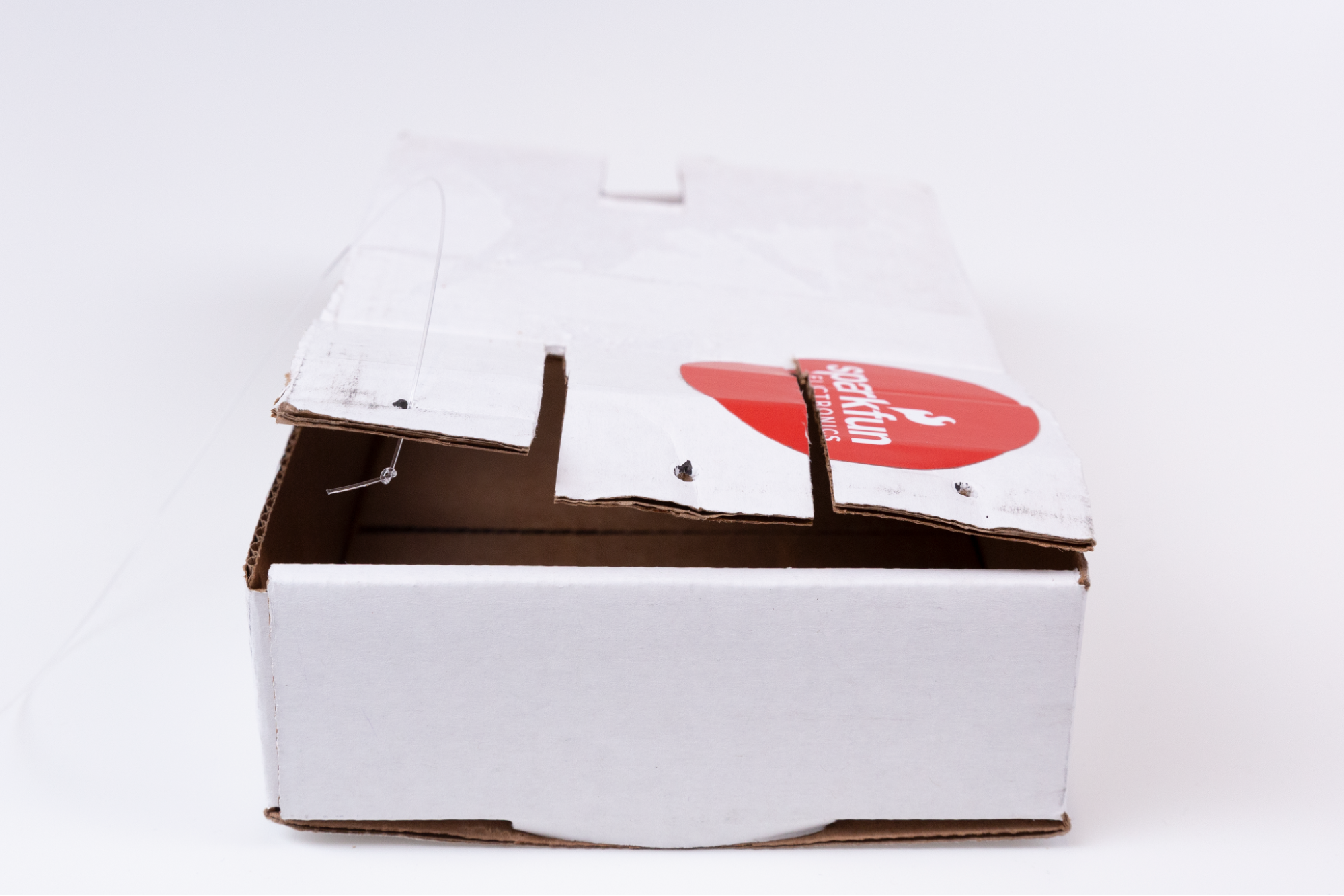
Start by removing some pieces from the cardboard box the kit came in. With the lid open, remove each of the side flaps that would normally tuck into the box when closed.

Next, with the side of the box with the opening facing you (also the side with a half circle cut out near the top), cut a rectangle into the left-hand side. This is where you’ll insert the servo—you can use that part to measure the size of the slot to be created.

On the opposite end of the rectangle, make three fingers by cutting out small gaps. These gaps should resemble very thin rectangles.

Using either a pen or the thinnest end of a screwdriver, poke holes in the center of each finger created. This is best accomplished by opening the lid and flipping it over so that you’re looking at the brown side of the cardboard box. Then, gently apply pressure creating the smallest possible hole in the cardboard.

Next, replicate how fingers typically bend. This means slightly creasing each finger at approximately the same location. These will replicate the second finger knuckle and where the finger connects to the hand. Then, bend the whole lid just below the thin rectangles to replicate how a hand can fold.

Now you have the beginnings of the hand. Next, measure out three single clear wires. Each one should be about as long as the length of the box plus a half length. To do this, take the clear wire and spool out enough to run the length of the long part of the box and then enough to run back along that same half until you get to the half circle.

For each wire, thread one end through the finger hole you created so that the knot is on the bottom side. Thread the other end upward through the holes in the circle servo piece so that it knots on the top.