Contributors:
 QCPete
QCPete,
santaimpersonator Introduction
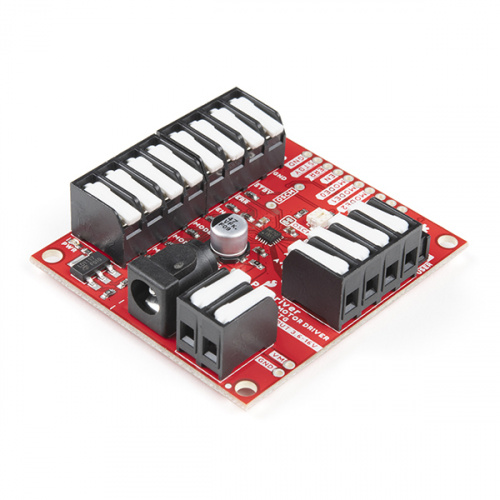
The SparkFun ProDriver utilizes the latest TC78H670FTG stepper motor driver from Toshiba. With a full to 1/128 stepping resolution and two different methods for control (serial communication or clock-in stepping) this is a great option for your next project that requires precise motor control.
Only 2 left!
ROB-16836
The ProDriver makes it easy to start developing with the Toshiba TC78H670FTG bipolar stepper motor driver IC.
Although both communication methods are included in the Arduino library, the serial command has some unique features. The serial communication allows users to precisely control the phase, torque, mixed decay ratio of each coil, and current limit while the motor is in motion. (In contrast, most stepper motor drivers need an external trimpot that is physically adjusted to control the current output limit.)
Required Materials
The SparkFun ProDriver does need a few additional items for you to get started. At minimum, users will want an Arduino compatible microcontroller with a USB cable, a power supply, some hookup wire or jumper wires, and a stepper motor (*we recommend a 4-wire, bipolar stepper motor to begin with). You may already have a few of these items, including the USB cable, so feel free to modify your cart based on your needs. Additionally, there are also alternative part options that are available as well (click button below to toggle options).
Alternative Parts (Toggle)
Recommended Parts
In stock
DEV-15123
The SparkFun RedBoard Qwiic is an Arduino-compatible development board with a built in Qwiic connector, eliminating the need …
19
In stock
ROB-10846
These steppers are a great way to get things moving, especially when positioning and repeatability is a concern.
This is …
17
In stock
CAB-10215
USB 2.0 type A to Micro-B 5-pin. This is a new, smaller connector for USB devices. Micro-B connectors are about half the heig…
15
17 available
TOL-15312
This is a high quality switching 'wall wart' AC to DC 5V 2000mA Barrel Jack wall power supply manufactured specifically for S…
2
Only 2 left!
ROB-16836
The ProDriver makes it easy to start developing with the Toshiba TC78H670FTG bipolar stepper motor driver IC.
Out of stock
PRT-08431
This is a SparkFun exclusive! These are 155mm long, 26 AWG jumpers with male connectors on both ends. Use these to jumper fro…
2
Microcontrollers
Here are a few other Arduino compatible microcontrollers. For a full list of options from our catalog, please visit the Arduino microcontroller product category.
In stock
DEV-11113
SparkFun's minimal design approach to Arduino. This is a 5V Arduino running the 16MHz bootloader.
140
In stock
DEV-12640
Here at SparkFun, we refuse to leave 'good enough' alone. That's why we're adding to our line-up of Arduino-compatible microc…
81
In stock
DEV-11114
SparkFun's minimal design approach to Arduino. This is a 3.3V Arduino running the 8MHz bootloader.
54
In stock
DEV-15123
The SparkFun RedBoard Qwiic is an Arduino-compatible development board with a built in Qwiic connector, eliminating the need …
19
In stock
DEV-15795
The SparkFun Qwiic Pro Micro adds a reset button, Qwiic connector, USB-C, and castellated pads to the miniaturized Arduino bo…
10
In stock
DEV-11021
This is the new Arduino Uno R3. In addition to all the features of the previous board, the Uno now uses an ATmega16U2 instead…
138
In stock
DEV-13975
The SparkFun RedBoard combines the simplicity of the UNO's Optiboot bootloader, the stability of the FTDI, and the shield com…
49
Out of stock
DEV-15594
The RED-V RedBoard from SparkFun is a low-cost, Arduino-compatible development board featuring the Freedom E310 which brings …
8
Wiring
Here are a few other wiring options. For a full list of options from our catalog, please visit the wire product category.
Out of stock
PRT-12795
These are 6" long jumper wires with male connectors on both ends. Use these to jumper from any female header on any board, to…
2
In stock
PRT-11367
An assortment of colored wires: you know it's a beautiful thing. Six different colors of solid core wire in a cardboard dispe…
37
In stock
PRT-10897
These are 26 AWG jumper wires terminated as male to male. Use these to jumper from any female header on any board, to any oth…
6
Only 7 left!
PRT-11026
If you need to knock up a quick prototype there's nothing like having a pile of jumper wires to speed things up, and let's fa…
20
In stock
PRT-11709
Jumper wires are awesome. Just a little bit of stranded core wire with a nice solid pin connector on either end. They have th…
2
In stock
PRT-08022
Standard 22 AWG solid Black hook up wire. Use this with your bread board or any project in which you need sturdy wire. Comes …
1
In stock
PRT-08023
Standard 22 AWG solid Red hook up wire. Use this with your bread board or any project in which you need sturdy wire. Comes in…
1
In stock
PRT-08024
Standard 22 AWG solid Yellow hook up wire. Use this with your bread board or any project in which you need sturdy wire. Comes…
Stepper Motors
Here are a few other stepper motor options. For a full list of options from our catalog, please visit the stepper motor product category.
Out of stock
ROB-20441
A 3-phase DC brushless DC motor has the unique capability of being both a high efficiency, high torque, very smooth motor, a…
In stock
ROB-09238
This is a simple, but very powerful stepper motor with a 4-wire cable attached.
This is a [Bipolar](http://en.wikipedia.o…
21
In stock
ROB-22132
The SparkFun IoT Brushless Motor Driver is a powerful WiFi & BLE capable motor driver that can control any 3-phase BLDC motor…
2
In stock
ROB-10846
These steppers are a great way to get things moving, especially when positioning and repeatability is a concern.
This is …
17
Power supply
Here are a few other power supply options. For a full list of options from our catalog, please visit the power supply and wall adapter product categories.
In stock
TOL-15313
This is a high quality AC to DC 'wall wart' which produces a regulated output of 12VDC at up to 600mA.
Out of stock
TOL-15314
This is a high quality switching 'wall wart' AC to DC 9V 650mA wall power supply manufactured specifically for SparkFun Elect…
1
In stock
TOL-15352
This is a high quality power supply manufactured specifically for SparkFun Electronics packs a lot of power; 20W at 5V and 40…
Retired
KIT-15701
The ATX power connector breaks out the standard 4-pin computer peripheral port for you 12V & 5V devices from one wall adapter…
6
Retired
Retired
TOL-14601
This is a 40W single output switching power supply from Mean Well that has been specifically designed to be with LED applicat…
Retired
Mean Well Switching Power Supply - 12VDC, 12.5A
Retired
TOL-16266
This Mean Well Switching Power Supply has an output of 12VDC, 12.5A, 150W.
Retired
Retired
TOL-14934
This power supply is a highly reliable desktop style single-output green adapter. It is designed with a low/no load power con…
2
Retired
Mean Well Slim Wall-Mounted Power Adapter 54W - 12V, 4.5A
Retired
TOL-15340
54W high efficiency wall adapter with barrel jack connector.
Retired
Soldering Accessories
Although the ProDriver is intended to be solderless, if you would like to modify the jumpers or solder the wiring, you will need soldering equipment and/or a hobby knife.
In stock
TOL-09325
This is your basic spool of lead free solder with a water soluble resin core. 0.031" gauge and 100 grams. This is a good spoo…
8
In stock
TOL-14579
This 10mL no-clean flux pen from Chip Quik is great for all of your solder, de-solder, rework, and reflow purposes!
4
19 available
TOL-09200
It's like an Xacto knife, only better. We use these extensively when working with PCBs. These small knives work well for cutt…
2
Retired
TOL-14228
The WLC100 from Weller is a versatile 5 watt to 40 watt soldering station that is perfect for hobbyists, DIYers and students.…
2
Retired
Suggested Reading
We will skip over the more fundamental tutorials like Ohm's Law and What is Electricity?. However, below are a few fundamental tutorials that may help users familiarize themselves with various aspects of this board.
Serial Communication
Asynchronous serial communication concepts: packets, signal levels, baud rates, UARTs and more!
Installing an Arduino Library
How do I install a custom Arduino library? It's easy! This tutorial will go over how to install an Arduino library using the Arduino Library Manager. For libraries not linked with the Arduino IDE, we will also go over manually installing an Arduino library.
Installing Arduino IDE
A step-by-step guide to installing and testing the Arduino software on Windows, Mac, and Linux.
Logic Levels
Learn the difference between 3.3V and 5V devices and logic levels.

































{kind=link}